(puij
1
Изобретение относится к устройствам для радиоизмерений ипредназначено для измерения девиации частоты при трех модулирующих частотах при параметрическом контроле радиопередатчиков,
Цель изобретения - повышение точности измерения путем обеспечения возможности учета.нелинейных искажений, вносимых измерительным устрой ством.
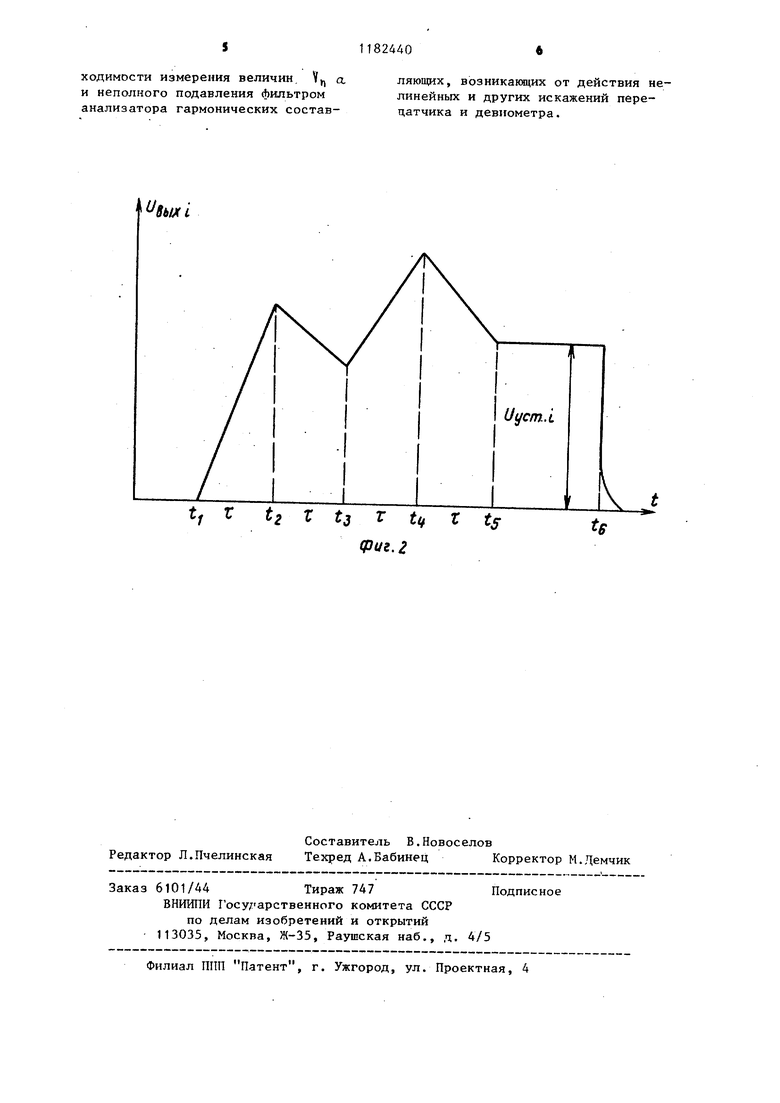
На фиг,1 показана структурная схема устройства; на фиг.2 - диаграмма напряжения на выходе интегросумматора.
Устройство содержит соединенные последовательно генератор 1, исказитель 2, передатчик 3, частотный детектор 4, квадратичный детектор 5 и коммутатор 6 с одного канала на пять, а также три интегросумматора 7-9, каждый с двумя прямыми и чередующимися с ними двумя инверсньп и входами 5 причем каждый прямой и инверсный входы интегросукматора 7 соединены с соответствующими прямым и инверсным входами интегросумматоров 8 и 9 и четырьмя выходами управляемого коммутатора 6, первый, зыход которого свободен. Кроме того, имеется блок 10 управления, сигналы которого управляют работой управляемого коммутатора 6, управляемого исказителя 2 и интегросумматоров 7-9. .
Предлагаемое устройство работает следующим образом.
Генератор 1 вьфабатывает синусоидальное напряжение, например, частотой 5 кГц, которое поступает на исказитель 2. В исходном положении устройства исказитель 2 находится в произвольном состоянии, а сигналом с блока 10 управления коммутатор 6 переводится в положение 1 (верхнее на фиг.1), при этом входы интегросумматоров отключены, а сами они импульсом с блока 10 управления приводятся в исходное (обнуленное) состояние.
Собственно цикл измерения начинается в момент ij , начиная с которого по сигналу с блока 10 управления коммутатор 6 производит поочередное с интервалом времени длительностью L J- -кратное подключение выхода квадратичного детектора 5 к соединенным параллельно первым (прямым), вторым
824402
(инверсным), третьим (прямым) и чет вертым (инверсным) входам интегросумматоров.
Интервал 2 выбирается из соот5 ношения:
ср. макс ;
to где о ср.макс быстродействие наименее быстродействующего узла устройства. В качестве управляемого коммутатора 6 может применяться любой электронный коммутатор.
J5 Синхронно с моментами лереключений коммутатора 6 t,t,t,t сигналами с блока 10 управления производится четырехкратное изменение режима работы управляемого искази0 теля 2 таким образом, что напряжение на его выходе после каждого j -го такта измерения имеет вид:
iu..ib
(1) J Uii-J,
где - номер гармоники,
U; - амплитуды 1 -X гармоник при
j -X тактах., величины которых варьируются произвольно но определенно априорно в пределах, определяемых допустимой 10%-ной погрешностью установки амплитуды испытательного сигнала. В качестве исказителя 2 используют, например, калибратор нелинейных искажений, с тремя каналами формирования сигнгшов, настроенными на частоты 5, 10 и 20 кГц и с управляемыми от блока 10 управления аттенюаторами на входе сумматора для регулирования амплитудных соотношений гармонических составляющих.
Сигналы с исказителя 2 поступают на модуляционный испытуемого передатчика 3 и далее на частотный детектор 4, сигнал с которого в форме огибающей модулированного сигнала поступает на квадратичный детектор 5, на выходе которого при каждом такте появляются сигналы вида:
г,. (2)
где К; - коэффициент передачи i -и гармоники от входа передатчика до ьокода частотного детектора. Uq - суммарный сигнал паразитной модуляции и продуктов собственных искажений передатчика 3 и частот ного детектора 4. В системе -уравнений (2) еделаны следующие методические допущения: в течение всех тактов измерения величины К; и Un считаются неизменными. Первое справедливо из-за практически абсолютной линейности амплитудной характеристики передатчика в зоне номинальной девиации, при этом малые изменения величины не вызьшают практически изменения величины К; . Второе допущение опирается на то, что флюктуация величиныU в течение 1 с не превышает 0,1%. . Условно . К„; . . Решение системы (2) из j 4 линейных уравнений с четырьмя неизвес ными (К,(где 4 1,2,4) и И,;) произ водится матричным методом по формул Крамера (4): Уде О - определитель матрицы, составленной из неизвестных при членах системь (2)i Б; - частные определители этой матрицы. В матрицу для D входят лишь члены с априорно известными величинами U, и К 1, поэтому величина В для предла гаемого устройства известна. Частные определители ,-т:::L( , где Mj.- миноры матрицы для.1)|аналогично D , вычисляются из иэвестных величин и для предлагаемого устройства известны. Из (2) искомые значения девиаций ь1, с учетом (3) и (4) 1;--М;Км |.Км/(5):
.
i j ;U;jHV- . (6)
;
где KJц - коэффициент масштабирования
результата. 55
Таким образом, искомые значения .д{; могут быть найдены по априорным значениям Kj- и результатам каждого 1
, наибольшие Uпричем известна
и /3 и допустимая..,.,..
П41 1
Величина Vf, специально не вычисляется , но методически учитьшается в результатах измерения.
В предлагаемом устройстве устранены погрешности, свойственные известному устройству из-за необ011 такта измерения (J- на выходе квадратичйого детектора 5. Для этого параметры интегросумматоров 7-9 выбирают из выражения где J, : - коэффициент передачи 1-го интегросумматора по j -му входу, если номер интегросумматора соответствует номеру гармоники, а номер входа - номеру такта измерения, при KofopoM на этот вход коммутируется сигнал. При этом коэффициент согласно (6) изменяет свой знак, что требует наличия у каждого интегросумматора двух прямых и двух инверсных входов. Постоянная времени интегрирования Т должна быть единой для всех интегросумматоров. В процессе всего измерения напряжение на выходе -го интегросумматора (фиг.2) изменяется согласно вьфажению: U.,,,., °Ь1Х, т -. 1,734 J О а к концу четвертого такта измеренияи.„,.и..,/ц.и,„.;. в момент коммутатор 6 возвращается в исходное положение, а на выходах интегросумматоров появляютсяПосле индикации по сигналу сброа в ноль ( tg ) интегросумматоров т блока 10 управления устройство отово к новому циклу измерения. Величина Т рассчитьшается из в; 1аженияUe«rPi- j/T,.
ходимости измерения величин. У а и неполного подавления фильтром анализатора гармонических составляющих, возникакмцих от действия нелинейных и других искажений перецатчика и девиометра.
УСТРОПСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ ПРИ ТРЕХ МОДУЛИРУЮЩИХ ЧАСТОТАХ, содержащее генератор и соединенные последовательно передатчик и частотный детектор, отличающееся тем, что, с целью повышения точнрсти измерения, в него введены исказитель, последовательно соединенные квадратичный детектор и коммутатор, три интегросумматора, блок управления, выходы которого соединены соответстненно с входами управления исказителя, коммутатора и объединенными входаь:и сброса ийтегросумматоров, вход исказителя соединен с выходом генератора, а выход - с входом передатчика, первый выход коммутатора свободный, второй выход соединен с первыми прямыми входами интегросумматоров, третий - с первыми инверсными вхоte дами интегросумматоров, четвертый- (Л с вторыми прямыми входами интегросумматоров, а пятый - с вторыми инверсными входами интегросумматоров, выход частотного детектора соединен с входом квадратичного детектора.
| Мирский Г.Я | |||
| Радиоэлектронные измерения.- М.: Энергия, 1969 | |||
| Промывной бак для клозетов | 1927 |
|
SU12252A1 |
| Радиостанции с угловой модуляцией сз опутной службы. | |||
