Изобретение относится к радиотехнике и может быть использовано для оценки и контроля параметров радиоизлучений, определения вида принимаемых сигналов и измерения их частотных характеристик.
Для решения некоторых задач, например в радиоконтроле, необходимо обеспечить измерение и ввод в ЭВМ информации о законе внутриимпульсной частотной модуляции (ЧМ) в реальном (или близком к нему) масштабе времени (т.е. для каждого принятого радиоимпульса) для последующего использования этого параметра при идентификации и классификации сигналов.
Многообразие возможных законов изменения частоты в импульсе - линейные, нелинейные со степенной функцией частотной модуляции, составные (Кук Ч., Бернфельд М. Радиолокационные сигналы. Теория и применение. Пер. с англ./Под ред. М. Кельзона. М.: Сов. радио, 1971, с. 347), позволяет считать закон важнейшим информационным параметром, обеспечивающим идентификацию и классификацию сигналов совместно с такими параметрами, как несущая частота (начальная или средняя), длительность радиоимпульса, период следования радиоимпульсов, девиация частоты и направление перестройки несущей частоты (от начального меньшего значения к конечному большему, или наоборот).
Закон изменения частоты в радиоимпульсе может быть оценен по результатам измерения мгновенных значений несущей частоты fi в дискретные моменты времени ti, i = 1, 2, 3, ..., n. Такие измерения обеспечивают, например, акустооптические измерители параметров сигналов (Кочемасов В.Н., Долбня Е.В. , Соболь Н.В. Акустоэлектронные Фурье-процессоры. - М.: Радио и связь, 1987, с. 133; авт.св. СССР N 1124431, кл. H 03 J 7/32, 1984; Кочемасов В.Н. Применение дисперсионных Фурье-процессоров в разведывательных приемниках. - Зарубежная радиоэлектроника, N 2, 1987, с. 66-73). Вместо измерения непосредственно мгновенных отсчетов частоты fi могут измеряться, например, значения амплитуды Ai сигнала с выхода частотного детектора, функционально зависящие от частоты. Измерения могут проводиться как вручную, так и автоматически. В радиоконтроле измерение и ввод мгновенных отсчетов частоты производится автоматически и в реальном масштабе времени.
После получения массива значений fi необходимо провести построение функциональной зависимости f(t) закона изменения частоты в импульсе по дискретным значениям частоты fi каким-либо методом интерполяции, например параболической (Бронштейн И.Н., Семендяев К.А. Справочник по математике. - М. : Наука, 1967, с. 574). Таким образом, для измерения закона изменения частоты в импульсе требуется проведение дополнительных операций (сложение, деление и т.п.) с результатами измерения мгновенных отсчетов частоты fi.
Проведение таких операций в реальном масштабе времени с отсчетами несущей частоты fi, поступающими с выхода измерителя с большой частотой следования и в большом объеме, а затем хранение в памяти функций f(t) в целях использования для классификации сигналов и идентификации источников излучения, затруднительно даже для высокопроизводительных ЭВМ, т.к. требует высокоскоростных устройств ввода информации, больших объемов оперативной и постоянной памяти, высокой скорости обработки информации.
Для обеспечения требуемого быстродействия при измерении закона и уменьшения объема информации о законе изменения частоты в импульсе необходимо иметь оценку закона в виде одного или нескольких чисел.
Получение результатов измерения закона в виде одного числа обеспечивает способ измерения нелинейных искажений закона изменения частоты ЧМ сигнала (Павленко Ю. Ф. , Шпаньон П.А. Измерение параметров частотно-модулированных колебаний. - М. : Радио и связь, 1986, с. 118). Способ состоит в измерении амплитуды гармонических составляющих модулирующего сигнала и вычислении отношения этих амплитуд к амплитуде первой гармоники. При этом после преобразования принятого частотно-модулированного сигнала на промежуточную частоту, усиления сигнала на промежуточной частоте, частотного детектирования производится частотная селекция и измерение амплитуд гармонических составляющих модулирующего сигнала. Далее производят операцию вычисления коэффициента гармоник по каждой i-й гармонике по формуле
Kгi=Ui/U1,
где Ui - измеренная амплитуда напряжения i-й гармоники;
U1 - измеренная амплитуда напряжения 1-й гармоники модулирующего сигнала.
Признаком аналога, совпадающим с признаками заявляемого технического решения, является измерение несущей частоты радиоимпульса.
Недостатком известного способа является невозможность проведения измерения в реальном масштабе времени.
Причины, препятствующие достижению требуемого результата, состоят в необходимости настройки селективных по частоте устройств на гармоники модулирующей частоты, т.е. априорного знания параметров исследуемого сигнала.
Устройство, реализующее данный способ (Павленко Ю.Ф., Шпаньон П.А. Измерение параметров частотно-модулированных колебаний. - М.: Радио и связь, 1986, с. 118), состоит из последовательно соединенных генератора модулирующего напряжения, частотно-модулированного генератора, измерителя девиации частоты (ИДЧ), и измерителя нелинейных искажений (ИНИ). Причем ИДЧ состоит из последовательно соединенных преобразователя частоты, ограничителя и частотного детектора.
Признаком аналога, совпадающим с признаком заявляемого технического решения, является измеритель девиации частоты, состоящий, например, из усилителя ограничителя с частотным детектором, на основе которых может быть построен измеритель частоты радиоимпульса.
Недостатком известного устройства является невозможность проведения измерения в реальном масштабе времени.
Причины, препятствующие достижению требуемого результата, состоят в необходимости настройки селективных по частоте устройств на гармоники модулирующей частоты, т.е. априорного знания параметров исследуемого сигнала.
Известно устройство измерения скорости линейного изменения частоты внутри импульса (патент РФ N 2010243, кл. G 01 R 23/00, 1994).
Измеритель скорости линейного изменения частоты в импульсе содержит блок формирования, информационный вход которого соединен с шиной входных сигналов, два счетчика, блок вычитания, блок управления и синхронизации, две цифровые линии задержки, N+1 элементов И, блок ждущего мультивибратора, причем счетчики выполнены в виде реверсивных, выход блока формирования подключен к суммирующему входу первой цифровой линии задержки, выход которой соединен с вычитающим входом первого счетчика, суммирующим входом второго реверсивного счетчика и входом второй цифровой линии задержки, выход которой подключен к вычитающему входу второго реверсивного счетчика и первому входу (N+1)-го элемента И, выход которого через блок ждущего мультивибратора соединен с вторыми входами элементов И с первого по N-й, выходы первого и второго реверсивных счетчиков соединены соответственно с первой и второй группами входов блока вычитания, выходы которого с первого по N-й соединены с первыми входами соответствующих элементов И, выходы которых подключены к выходам измерителя, первый выход блока управления и синхронизации соединен с управляющим входом блока формирования, а второй выход - с синхронизирующими входами первой и второй цифровых линий задержки и вторым входом (N+1)-го элемента И.
Признаки аналога, совпадающие с признаками заявляемого технического решения, следующие: две цифровые линии задержки, реализованные, например, как два регистра, блок вычитания.
Причины, препятствующие достижению требуемого технического результата, заключаются в том, что выходной информацией в данном устройстве является значение скорости изменения частоты, которое не несет информации о законе изменения частоты во времени.
Наиболее близким по технической сущности к предлагаемому способу и устройству является способ сжатия информации, основанный на дифференциальном (обобщенно-разностном) представлении аналогового сообщения (Новоселов О.П., Фомин А.Ф. Основы теории и расчета информационно-измерительных систем. - М.: Машиностроение, 1991, 336 с. ). Дифференциальным (обобщенно-разностным) представлением аналогового сообщения λ(t) называется последовательность разностей вида
gk= λk-λэk= εэk; k = 1, 2,...,
g0= λ0,
при условии, что экстраполированное сообщение λэk вычисляется по передаваемым значениям разностей gk-1, которые могут отличаться от фактических.
Разностное представление, определяемое как последовательность конечных разностей вида
g0= λ0
Δkλk; 0 ≤ k ≤ N-1;
ΔNλk; k ≥ N,
где  является частным случаем дифференциального представления (1).
является частным случаем дифференциального представления (1).
Сущность способа заключается в следующем: непрерывная во времени измеряемая аналоговая величина λ(t) (в нашем случае частота высокочастотного заполнения радиоимпульса) подвергается аналого-цифровому преобразованию (измеряются и преобразуются в цифровой вид отсчеты мгновенной частоты). Получаемые в результате цифровые отсчеты мгновенной частоты fi, следующие с частотой дискретизации, задерживаются на такт в цифровом запоминающем устройстве - регистре (fi-l), а далее выполняется операция вычитания последующего отсчета мгновенной частоты fi из значения предыдущего отсчета частоты fi-l.
Признаки прототипа, совпадающие с признаками заявляемого технического решения, следующие: вычисление разности между принятыми и задержанными на один такт отсчетами несущей частоты радиоимпульсов после измерения несущей частоты радиоимпульсов.
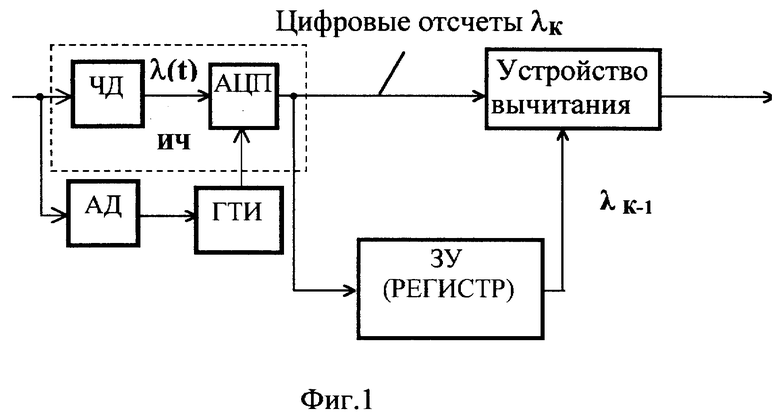
Структурная схема устройства, реализующего данный способ, показана на фиг. 1 (Новоселов О.Н., Фомин А.Ф. Основы теории и расчета информационно-измерительных систем. - М.: Машиностроение, 1991). Устройство содержит измеритель несущей частоты (ИЧ), состоящий из последовательно соединенных частотного детектора и аналого-цифрового преобразователя (АЦП), запоминающее устройство (регистр), устройство вычитания и последовательно соединенные амплитудный детектор (АД), вход которого соединен с входом устройства и генератор тактовых импульсов (ГТИ), выход которого соединен с тактовым входом АЦП, причем выход АЦП соединен с первым входом устройства вычитания и с входом запоминающего устройства, выход которого соединен с вторым входом устройства вычитания, выход которого является выходом устройства.
Признаки прототипа, совпадающие с признаками заявляемого технического решения, следующие: измеритель несущей частоты, запоминающее устройство (регистр).
Причины, препятствующие достижению требуемого технического результата, заключаются в том, что выходной информацией в данном способе и устройстве являются первое значение параметра и значения первой разности, которые характеризуют величину параметра, но напрямую не несут информации о законе изменения параметра во времени.
Задача, на решение которой направлено изобретение, заключается в измерении закона перестройки частоты в импульсе в реальном масштабе времени (или близком к нему) при априорной неизвестности параметров ЧМ импульсов.
Технический результат, достигаемый при осуществлении изобретения, позволяет обеспечивать измерение закона изменения частоты в импульсе при ЧМ несущей радиоимпульса в реальном масштабе времени, чем достигается повышение быстродействия в два и более раз (в зависимости от вида закона изменения частоты) аппаратуры радиоконтроля, при решении задачи идентификации и классификации ЧМ сигналов.
Технический результат достигается тем, что в способе измерения закона изменения несущей частоты радиоимпульсов с частотной модуляцией, состоящем в вычислении разности между принятыми и задержанными на такт отсчетами несущей частоты радиоимпульсов после измерения несущей частоты радиоимпульса, вычисляют первую разность между вторым и первым отсчетами частоты, вторую разность между последним и предпоследним отсчетами частоты радиоимпульса, третью разность между первыми двумя разностями, а также четвертую разность между последним и первым значениями отсчетов частоты радиоимпульса, при этом модуль четвертой разности определит девиацию частоты в радиоимпульсе, а знак этой разности определит направление перестройки несущей частоты в радиоимпульсе, модуль третьей разности определит кривизну, а знак этой разности определит вид (выпуклость или вогнутость) функции закона перестройки частоты в радиоимпульсе.
Технический результат достигается также тем, что в устройство, содержащее последовательно соединенные измеритель несущей частоты и первый регистр, последовательно соединенные амплитудный детектор, вход которого соединен с входом измерителя несущей частоты и является входом устройства, и генератор тактовых импульсов, введены соединенные по информационным входам второй регистр, третий регистр, четвертый регистр и пятый регистр, последовательно соединенные с вторым регистром шестой регистр и первое устройство вычитания кодов, соединенное с выходом четвертого регистра второе устройство вычитания кодов, седьмой, восьмой и девятый регистры, третье и четвертое устройство вычитания кодов и блок синхронизации, причем вход второго регистра соединен с выходом первого регистра, выход третьего регистра соединен с вторым входом первого устройства вычитания кодов и первым входом четвертого устройства вычитания кодов, а выход четвертого устройства вычитания кодов соединен с информационным входом седьмого регистра, выход которого является первым выходом устройства, выход четвертого регистра соединен также с вторым входом четвертого устройства вычитания кодов и с информационным входом восьмого регистра, выход которого является вторым выходом устройства, выходы второго и четвертого устройств вычитания кодов соединены с первым и вторым входами третьего устройства вычитания кодов соответственно, выход которого соединен с информационным входом девятого регистра, выход которого является третьим выходом устройства, выход амплитудного детектора соединен также с вторым входом блока синхронизации, выход генератора тактовых импульсов соединен с первым входом блока синхронизации и с тактовыми входами измерителя частоты, первого регистра и второго регистра, первый выход блока синхронизации соединен с входом записи информации четвертого регистра, второй выход блока синхронизации соединен с входом записи информации пятого регистра; третий выход блока синхронизации соединен с входами записи информации третьего и шестого регистров; четвертый выход блока синхронизации соединен с входами сброса информации измерителя частоты, первого регистра, второго регистра, третьего регистра, четвертого регистра, пятого и шестого регистров; пятый выход блока синхронизации соединен с входами записи информации седьмого, восьмого и девятого регистров.
Анализ существенных признаков прототипа и заявляемого объекта выявил следующие новые существенные признаки для заявляемого объекта:
- для способа: вычисляют первую разность между вторым и первым отсчетами частоты, вторую разность между последним и предпоследним отсчетами частоты радиоимпульса, третью разность между первыми двумя разностями, а также четвертую разность между последним и первым значениями отсчетов частоты радиоимпульса, при этом модуль четвертой разности определит девиацию частоты в радиоимпульсе, а знак этой разности определит направление перестройки несущей частоты в радиоимпульсе, модуль третьей разности определит кривизну, а знак этой разности определит вид (выпуклость или вогнутость) функции закона перестройки частоты в радиоимпульсе;
- для устройства: соединенные по информационным входам второй регистр, третий регистр, четвертый регистр и пятый регистр, последовательно соединенные со вторым регистром шестой регистр и первое устройство вычитания кодов, соединенное с выходом четвертого регистра второе устройство вычитания кодов, седьмой, восьмой и девятый регистры, третье и четвертое устройство вычитания кодов и блок синхронизации.
Совокупность введенных регистров и устройств вычитания кодов позволяет определять параметры закона внутриимпульсной модуляции - девиацию несущей частоты и ее знак, определяющий направление перестройки несущей частоты, кривизну закона перестройки несущей частоты в импульсе и ее знак, определяющий вид закона ЧМ - выпуклость или вогнутость.
Теоретическое доказательство наличия причинно-следственной связи совокупности заявляемых существенных признаков с указанным техническим результатом состоит в следующем.
Предлагаемый способ измерения закона внутриимпульсной ЧМ основан на методе исследования функций непрерывного аргумента с помощью производных первого и второго порядка (Смирнов В.И. Курс высшей математики. Т. 1. - М.: Наука, 1974, с. 169). При этом знак первой производной определит вид функции: монотонно возрастающая или убывающая, а знак второй производной укажет на выпуклость или вогнутость функции. Величина средней кривизны (там же, с. 169) определит степень выпуклости или вогнутости функции.
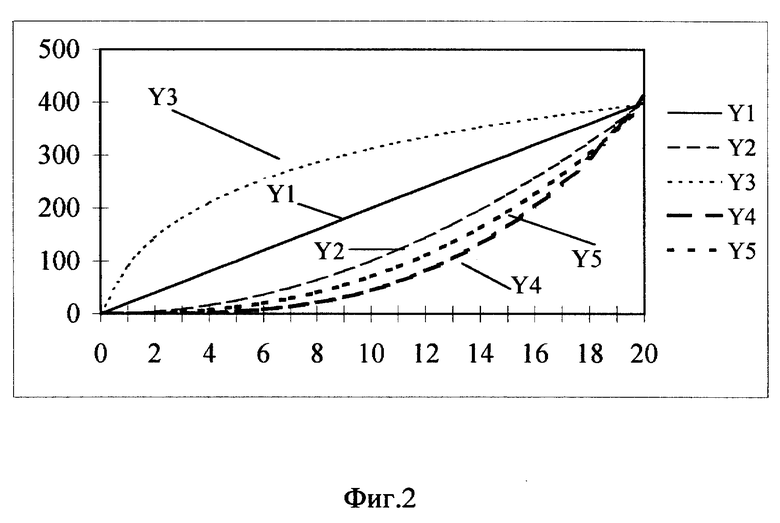
Пусть Y1, Y2, Y3, Y4 - гладкие, непрерывные и дифференцируемые по крайней мере дважды функции. При этом,
Y1(t0) = Y2(t0) = Y3(t0) = Y4(t0),
Y1(tn) = Y2(tn) = Y3(tn) = Y4(t0),
t = t0, t1, t2, ..., tn.
Для целей классификации необходимо определить вид этих функций на ограниченном отрезке временили τи(t0≤τи≤tn): возрастание (убывание) и выпуклость (вогнутость), а если функции имеют одинаковый вид, то иметь возможность различать функции одинакового вида. Предположим, что первые производные
Y1 I(t) > 0, Y2 I(t) > 0, Y3 I(t) > 0, Y4 I(t) > 0
а вторые производные
Y1 II(t) = 0, Y2 II(t) > 0, Y3 II(t) < 0, Y4 II > 0.
т. е. все функции монотонно возрастающие; Y1(t) - линейная, Y2(t) и Y4 - вогнутые, а Y3(t) - выпуклая (фиг. 2, где ti = 0, 1, 2, ..., 20).
Для различения функций Y2(t) и Y4(t) необходима дополнительная информация. Такую информацию может дать величина средней кривизны, под которой понимается (Смирнов В.И. Курс высшей математики. Т. 1. - М.: Наука, 1974, с. 169): абсолютная величина отношения угла между касательными в концах этой дуги к длине дуги.
Т. о. для компактного представления и последующего различения в ЭВМ ограниченной во времени гладкой и дифференцируемой функции непрерывного аргумента необходимо иметь следующий набор параметров:
1) начальное значение функции Y(t0);
2) конечное значение функции Y(tn) или значение разности Y(tn) - Y(t0);
3) длительность существования функции (tn-t0);
4) знак первой производной ΔI.,
5) знак второй производной ΔII.;
6) значение средней кривизны Δcp.
Отметим, что при измерении параметров ЧМ радиосигнала Y(t0) - соответствует начальному значению несущей частоты; разность Y(tn) - Y(t0) - девиации частоты; длительность существования функции (tn - t0) - длительности импульса τи. Т.о., для измерения закона внутриимпульсной ЧМ необходимо измерить знаки первой и второй производной функции перестройки частоты в импульсе и значение средней кривизны этой функции.
Информация о функции внутриимпульсного закона изменения частоты поступает в виде дискретных отсчетов частоты fi, через равные промежутки времени ti. Дискретные отсчеты fi, i = 1, 2, ..., n значений частоты можно представить как функцию дискретного аргумента - сеточную функцию (Фильчаков П.Ф. Численные и графические методы прикладной математики. - Киев.: Наукова думка, 1970, 800 c. ). В этом случае аналогом первой производной являются разности ΔI первого порядка
ΔI= fi+l-fi,
где fi+1 - отсчет мгновенного значения частоты в момент времени ti+1;
fi - отсчет мгновенного значения частоты в момент времени ti.
Аналогом второй производной являются разности ΔII второго порядка
ΔII= Δ
Для определения средней кривизны Δcp, как указывалось выше, необходимо определить угол между касательными в концах кривой, равный разности углов, образуемых касательными с осью абсцисс. Т.к. тангенс угла касательной есть первая производная, определение разности углов можно свести к определению разностей первых производных функции в концах кривой, т.е.
Δcp= Δ1-Δ2, (2)
где Δ1= f2-f1,
Δ2= fn-fn-1,
f1 - первый отсчет частоты;
f2 - второй отсчет частоты;
fn - последний отсчет частоты;
fn-1 - предпоследний отсчет частоты.
Покажем возможность идентификации импульсных сигналов с частотной модуляцией несущей частоты по параметру средняя кривизна закона изменения частоты в импульсе.
Сигнал со степенной функцией частотной модуляции запишем в виде (Варакин Л.Е. Теория сложных сигналов. - М.: Сов. радио, 1970, с. 117) 0≤t≤τи,
0≤t≤τи,
где A - амплитуда импульса;
ω0 - начальное значение несущей частоты;
Δω - девиация частоты в импульсе;
k - показатель степени.
При этом закон изменения частоты в импульсе определяется выражением
Так как измерение отсчетов несущей частоты производится в дискретные моменты времени iΔt, где i= 1, 2, ..., n - количество отсчетов несущей частоты, Δt - интервал времени, то функцию ω(t) можно представить как функцию дискретного аргумента
Тогда согласно (2) средняя кривизна определится как
где  разность между последним n и предпоследним (n-1) значениями отсчетов несущей частоты с выхода измерителя;
разность между последним n и предпоследним (n-1) значениями отсчетов несущей частоты с выхода измерителя; разность между вторым и первым значениями отсчетов несущей частоты.
разность между вторым и первым значениями отсчетов несущей частоты.
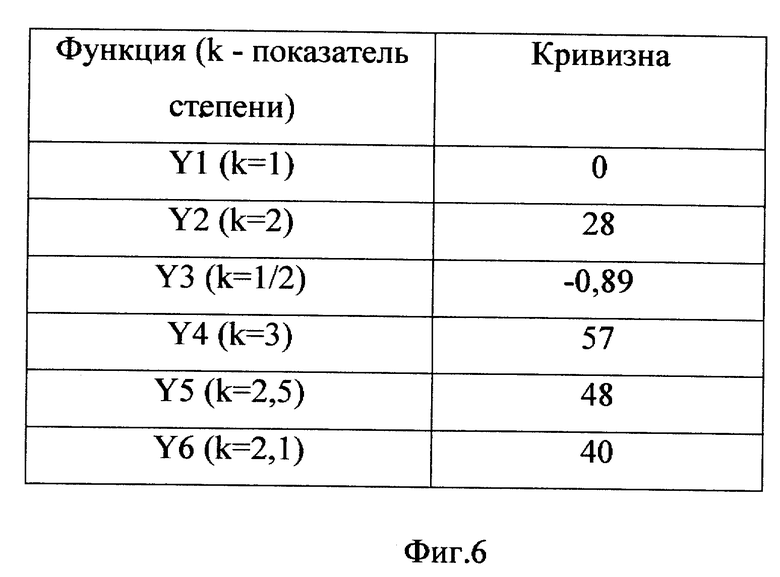
По выражению (3) вычислялись значения средней кривизны для функций Yl, Y2, Y4, Y5, представленных на фиг. 2, где для Y1: k = 1, для Y2: k = 2, для Y3: k = 1/2, для Y4: k = 3, для Y5: k = 2,5. А также для Y6: k = 2,1 (на фиг. 2 не показана). Результаты вычислений при Δt = 1 мкс, Δω = 400 МГц, τИ = 20 мкс, n = 20 представлены в таблице, изображенной на фиг. 6.
Как видно из представленных результатов, точность представления закона ЧМ одним показателем в виде кривизны достаточна для различения сигналов с различными законами ЧМ, отличающимися показателями степени всего на 0,1.
Если учесть, что в реальных устройствах измерение отсчетов несущей частоты производится с некоторой погрешностью Δfi, то погрешность определения кривизны по формуле (2) будет равна 4Δfi.
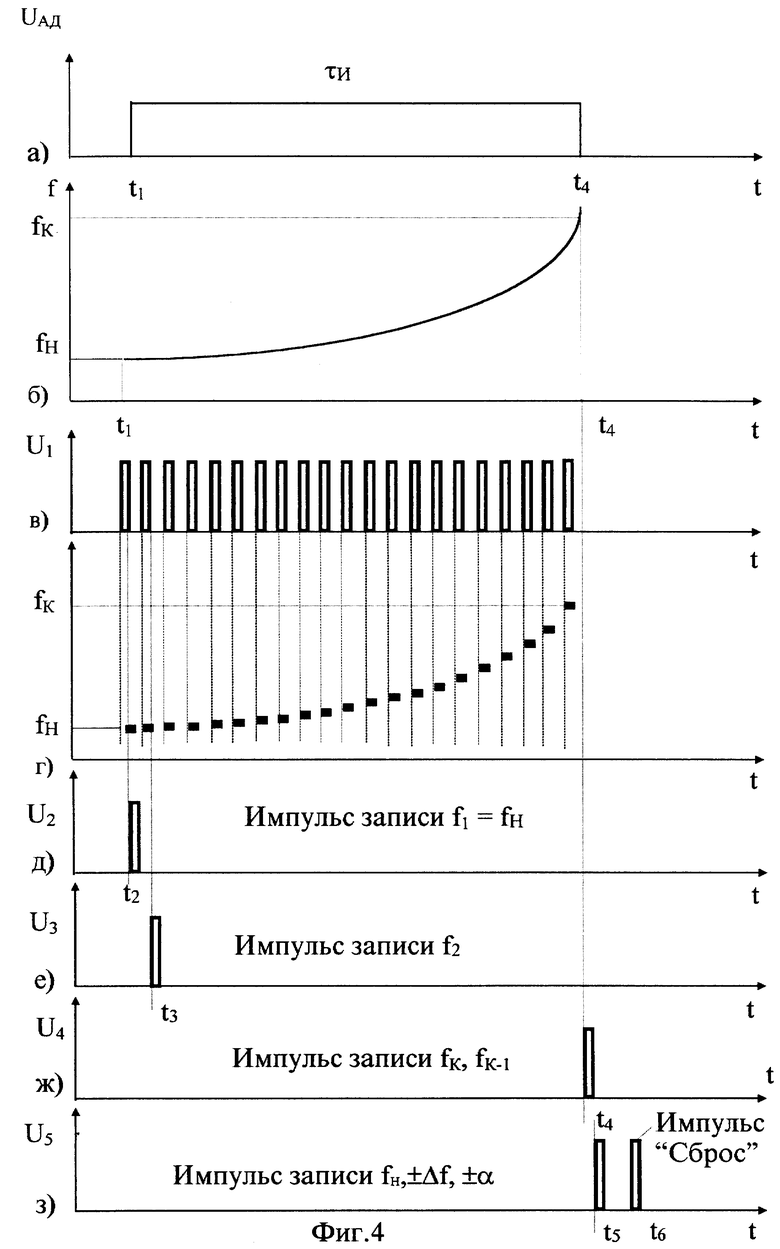
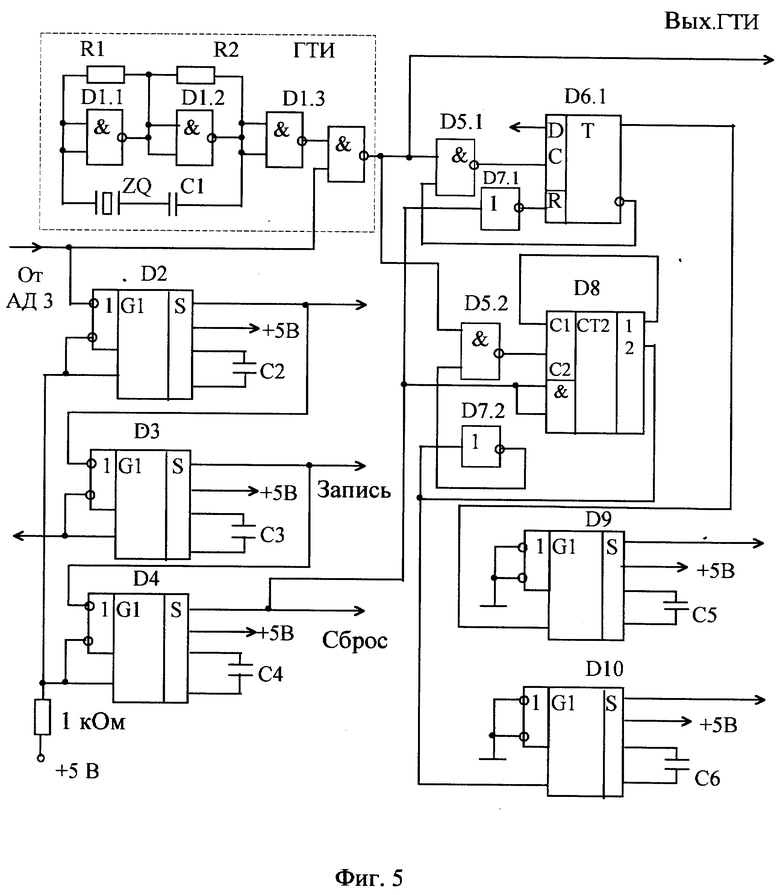
На фиг. 1 показана структурная схема прототипа устройства измерения закона перестройки несущей частоты радиоимпульсов с частотной модуляцией; на фиг. 2 изображены графики различных законов изменения частоты в импульсе; на фиг. 3 представлена схема электрическая структурная заявляемого устройства; на фиг. 4 - эпюры напряжений в характерных точках схемы и частотно-временные зависимости, иллюстрирующие работу устройства; на фиг. 5 представлена схема электрическая принципиальная генератора тактовых импульсов и блока синхронизации, как пример практической реализации указанных блоков; на фиг. 6 представлена таблица результатов вычисления кривизны закона изменения частоты в импульсе для различных законов.
Способ измерения закона перестройки несущей частоты радиоимпульсов с частотной модуляцией заключается в следующем.
После измерения несущей частоты радиоимпульса и вычисления разности между принятыми и задержанными на такт отсчетами несущей частоты радиоимпульсов вычисляют первую разность между вторым и первым отсчетами частоты, вторую разность между последним и предпоследним отсчетами частоты радиоимпульса, третью разность между первыми двумя разностями, а также четвертую разность между последним и первым значениями отсчетов частоты радиоимпульса, при этом модуль четвертой разности определит девиацию частоты в радиоимпульсе, а знак этой разности определит направление перестройки несущей частоты в радиоимпульсе, модуль третьей разности определит кривизну, а знак этой разности определит вид (выпуклость или вогнутость) функции закона перестройки частоты в радиоимпульсе.
Возможность осуществления способа измерения закона перестройки несущей частоты радиоимпульсов с частотной модуляцией поясним примером описания способа как последовательности следующих действий:
1. Измеряют значение несущей частоты радиоимпульса fi в дискретные моменты времени ti= i•Δt в течение длительности входного радиоимпульса.
2. Последовательно с измерением fi запоминают значения первого и второго отсчетов частоты f1, f2, предпоследнего и последнего отсчетов частоты fK-1, fK.
3. Вычисляют и запоминают значение первой разности отсчетов
Δ1= f2-f1;
4. Вычисляют и запоминают значение второй разности отсчетов
Δ2= fK-fK-1;
5. Вычисляют и запоминают значение третьей разности
Δ3= Δ1-Δ2;
6. Вычисляют и запоминают значение четвертой разности отсчетов
Δ4= fK-f1,
при этом модуль четвертой разности определит девиацию частоты в радиоимпульсе, а знак этой разности определит направление перестройки несущей частоты в радиоимпульсе, модуль третьей разности определит кривизну, а знак этой разности определит вид (выпуклость или вогнутость) функции закона перестройки частоты в радиоимпульсе.
Устройство измерения закона перестройки несущей частоты радиоимпульсов с частотной модуляцией содержит (фиг. 3) измеритель несущей частоты 1, первый регистр 2, амплитудный детектор 3, генератор тактовых импульсов 4, блок синхронизации 5, второй регистр 6, третий регистр 7, четвертый регистр 8, пятый регистр 9, шестой регистр 10, первое устройство вычитания кодов 11, второе устройство вычитания кодов 12, седьмой регистр 13, восьмой регистр 14 и девятый регистр 15, третье устройство вычитания кодов 16 и четвертое устройство вычитания кодов 17.
Входом устройства является вход измерителя частоты 1, выход которого соединен с информационным входом первого регистра 2, вход амплитудного детектора 3 соединен с входом измерителя частоты 1, а выход с входом генератора тактовых импульсов 4 и вторым входом блока синхронизации 5, выход генератора тактовых импульсов 4 соединен с входом синхронизации измерителя частоты 1, с входом синхронизации первого регистра 2, с первым входом блока синхронизации 5 и с входом синхронизации второго регистра 6, выход первого регистра 2 соединен со следующими информационными входами: второго регистра 6, третьего регистра 7, четвертого регистра 8 и пятого регистра 9, выход второго регистра 6 соединен с информационным входом шестого регистра 10, выход которого соединен с первым входом первого вычитающего устройства 11, выход четвертого регистра 8 соединен с первым входом второго устройства вычитания 12, второй вход которого соединен с выходом пятого регистра 9, входы синхронизации седьмого регистра 13, восьмого регистра 14 и девятого регистра 15 соединены с пятым выходом блока синхронизации 5, вход девятого регистра 15 соединен с выходом третьего устройства вычитания 16, первый вход которого соединен с выходом первого устройства вычитания 11, а второй вход с выходом второго устройства вычитания 12, выход третьего регистра 7 соединен с первым выходом четвертого устройства вычитания 17, выход которого соединен с информационным входом седьмого регистра 13, а второй вход соединен с выходом четвертого регистра 8, с вторым входом второго устройства вычитания 12 и с информационным входом восьмого регистра 14, первый выход блока синхронизации 5 соединен с входом записи информации четвертого регистра 8, второй выход блока синхронизации 5 соединен с входом записи информации пятого регистра, третий выход блока синхронизации 5 соединен с входом записи информации третьего 7 и шестого 10 регистров, четвертый выход блока синхронизации 5 соединен с входом сброса информации измерителя частоты 1, первого регистра 2, второго регистра 6, третьего регистра 7, четвертого регистра 8, пятого регистра 9, шестого регистра 10.
Устройство работает следующим образом (фиг. 4).
Измеряемые импульсные радиосигналы с ЧМ несущей частотой подаются на вход устройства. Измеритель частоты 1 обеспечивает измерение значений несущей частоты радиоимпульса в дискретные моменты времени ti, i = 1, 2, ..., n, задаваемые генератором тактовых импульсов 4. С выхода измерителя частоты 1 коды дискретных отсчетов частоты fi поступают на вход первого регистра 2 и с задержкой на такт, задаваемый генератором тактовых импульсов 4 - на входы второго 6, третьего 7, четвертого 8 и пятого 9 регистров. Таким образом, если в первый регистр 2 записан код второго отсчета несущей частоты fi, то во второй регистр 6 записан код первого отсчета несущей частоты и так далее.
Амплитудный детектор 3 обеспечивает выделение огибающей радиоимпульса с длительностью, равной длительности входного радиоимпульса и амплитудой, соответствующей уровню логической единицы цифровых микросхем транзисторно-транзисторной логики (ТТЛ) (фиг. 4а). Импульс с выхода амплитудного детектора 3 является стробирующим для генератора тактовых импульсов 4, т.е. тактовые импульсы на его выходе существуют только во время существования импульса с выхода амплитудного детектора 3 (фиг. 4а, в). Таким образом, количество n тактовых импульсов на выходе генератора тактовых импульсов 3 определяется длительностью входного радиоимпульса τИ и периодом тактовых импульсов Tт
где ent - целая часть числа.
В результате по срезу входного радиоимпульса в первом регистре 2 будет записан код последнего отсчета частоты fn, а во втором регистре 6 будет записан код предпоследнего отсчета несущей частоты fn-1.
Блок синхронизации 5 (фиг.2 и 5) формирует импульсы записи информации из первого регистра 2 и второго регистра 6 для обеспечения записи: первого отсчета несущей частоты f1 - в четвертый регистр 8, второго отсчета несущей частоты f2 - в пятый регистр 9, n-1 отсчета несущей частоты fn-1 - в шестой регистр 10, n-го отсчета несущей частоты fn - в третий регистр 7 (фиг. 4д, е, ж). Импульсы записи формируются: по срезу первого тактового импульса (фиг. 4д) для записи первого отсчета - выход 1 блока синхронизации 5 (запись первого отсчета - фиг. 5); по срезу второго тактового импульса (фиг. 4е) для записи второго отсчета - выход 2 блока синхронизации (фиг. 5 - выход 2); по срезу импульса с выхода амплитудного детектора 3 для записи n-1 и n-го отсчетов частоты (фиг. 4 ж) - выход 3 блока синхронизации 5 (фиг. 5).
Во втором устройстве вычитания 12 проводится вычисление первой разности между вторым f2 и первым f1 кодами отсчетов несущей частоты. В первом устройстве вычитания кодов 11 проводится вычисление второй разности между последним fn и предпоследним fn-1 кодами отсчетов несущей частоты. В третьем устройстве вычитания кодов 16 проводится вычисление третьей разности между первой и второй разностями, вычисленными в устройствах 11 и 12, значение которой определит величину кривизны α со знаком: знак + соответствует вогнутой кривой, знак - (минус) - выпуклой кривой. В четвертом устройстве вычитания кодов 17 проводится вычисление четвертой разности между последним fn и первым f1 отсчетами частоты, значение которой определит величину девиации несущей частоты радиоимпульса. Знак этой разности показывает направление перестройки несущей частоты: от меньшего значения начальной частоты к большему (+), или от большего значения к меньшему (-).
По срезу импульса записи n-1 и n-го отсчетов частоты с некоторой задержкой формируется (фиг. 4з) импульс записи параметров закона в выходные регистры: девиации со знаком (±Δf) в седьмой регистр 13, значения несущей частоты (первого отсчета несущей частоты) f1 - в восьмой регистр 14, значение кривизны со знаком (±α) - в девятый регистр 15. По срезу этого импульса формируется импульс сброса всех регистров устройства, кроме выходных.
Функциональные элементы заявленного объекта удовлетворяют критерию промышленного применения, так как могут быть выполнены, например, с использованием серийно выпускаемых компонентов (Аванесян Г.Р., Левшин В.П. Интегральные микросхемы ТТЛ, ТТЛШ. - М.: Машиностроение, 1993).
Измеритель несущей частоты 1 может быть реализован по различным известным схемам, например по схеме панорамного приемника на основе эффекта сжатия импульсов (Цурский Д.А., Перетягин И.В., Калюжный Н.М. Многоканальный панорамный приемник, а.с. СССР N 995285, кл. H 03 J 7/32, 07.02.83), или по схеме акустооптоэлектронного Фурье-процессора (Кочемасов В.Н., Долбня Е.В., Соболь Н. В. Акустооптоэлектронные Фурье-процессоры. - М.: Радио и связь, 1987, рис. 5.12 б, с. 137).
Амплитудный детектор 3 может быть выполнен на полупроводниковых диодах по схеме двухтактного диодного детектора (Справочник по учебному проектированию приемно-усилительных устройств. / Под ред. М.К.Белкина - Киев: Выща школа, 1982, с. 212, рис. 8.7).
Генератор тактовых импульсов 4 может быть реализован на микросхеме D1 типа 533ЛА3, двух резисторах R1, R2, конденсаторе C1 и кварцевом резонаторе ZQ (фиг. 5).
Блок синхронизации 5 (фиг. 5) выполнен на пяти микросхемах одновибраторов, D2, D3, D4, D9, D10 типа 533АГ3 с времязадающими конденсаторами C2 - C6, триггере D6 (микросхема типа 533ТМ2), двоичном счетчике D8 (микросхема типа 533ИЕ5), логическом элементе 2И-НЕ D5.1, D5.2 типа 533ЛА3, логическом элементе НЕ (D7.1, D7.2) типа 533ЛН1.
Регистры 2, 6, 7, 8, 10, 13, 14, 15 могут быть выполнены на микросхемах типа 533ИР8 (8-разрядный регистр сдвига с параллельным выходом).
Вычитающие устройства 11, 12, 16, 17 могут быть выполнены на микросхемах типа 533ИМ7 (четыре последовательных сумматора-вычитателя).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЗАКОНА ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ РАДИОИМПУЛЬСОВ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1998 |
|
RU2133476C1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1993 |
|
RU2099719C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1999 |
|
RU2143709C1 |
| СПОСОБ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ СИСТЕМОЙ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1996 |
|
RU2107926C1 |
| АДАПТИВНЫЙ ЦИФРОВОЙ ЧАСТОТНЫЙ ДИСКРИМИНАТОР | 2000 |
|
RU2166773C1 |
| ВЫСОКОТОЧНЫЙ АКУСТООПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ПЕРЕСТРОЙКИ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2001 |
|
RU2182337C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК-ЧАСТОТОМЕР | 2000 |
|
RU2178181C2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЛИНЕЙНОГО ИЗМЕНЕНИЯ ЧАСТОТЫ ВНУТРИ ИМПУЛЬСА | 1989 |
|
RU2010243C1 |
| МНОГОКАНАЛЬНЫЙ ПАНОРАМНЫЙ ПРИЕМНИК | 1996 |
|
RU2115997C1 |
| АКУСТООПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ РАДИОСИГНАЛОВ | 1999 |
|
RU2171997C2 |
Изобретение относится к радиотехнике и может быть использовано для измерения и контроля параметров радиоизлучений, определения вида принимаемых сигналов и измерения их частотных характеристик. Технический результат заключается в измерении закона перестройки частоты в импульсе в реальном масштабе времени (или близком к нему) при априорной неизвестности параметров ЧМ импульсов. Технический результат, достигаемый при осуществлении изобретения, позволяет осуществлять измерение закона изменения частоты в импульсе при ЧМ несущей радиоимпульса в реальном масштабе времени, чем достигается повышение быстродействия в два и более раз аппаратуры радиоконтроля, при решении задачи идентификации и классификации ЧМ сигналов. Технический результат достигается тем, что в способе обработки сигналов, состоящем в вычислении разности между принятым и задержанным на такт отсчетами несущей частоты, поступающих с измерителя несущей частоты радиоимпульса, дополнительно вычисляют первую разность между вторым и первым отсчетами частоты, вторую разность между последним и предпоследним отсчетами частоты, третью разность между первыми двумя разностями и определяют знак этой разности, а также четвертую разность между последним и первым значениями отсчетов частоты и определяют знак этой разности, при этом значение четвертой разности определит девиацию частоты в импульсе, а знак этой разности определит направление перестройки несущей частоты в импульсе, значение третьей разности определит кривизну, а знак этой разности определит вид (выпуклость или вогнутость) функции закона перестройки частоты в импульсе, и в устройство, содержащее последовательно соединенные измеритель несущей частоты и первый регистр, последовательно соединенные амплитудный детектор, вход которого соединен с входом измерителя несущей частоты и является входом устройства, и генератор тактовых импульсов, дополнительно введены блок синхронизации, второй регистр, третий регистр, четвертый регистр, пятый регистр, шестой регистр, первое устройство вычитания кодов, второе устройство вычитания кодов, седьмой, восьмой и девятый регистры, третье и четвертое устройства вычитания кодов. 2 с.п. ф-лы, 6 ил.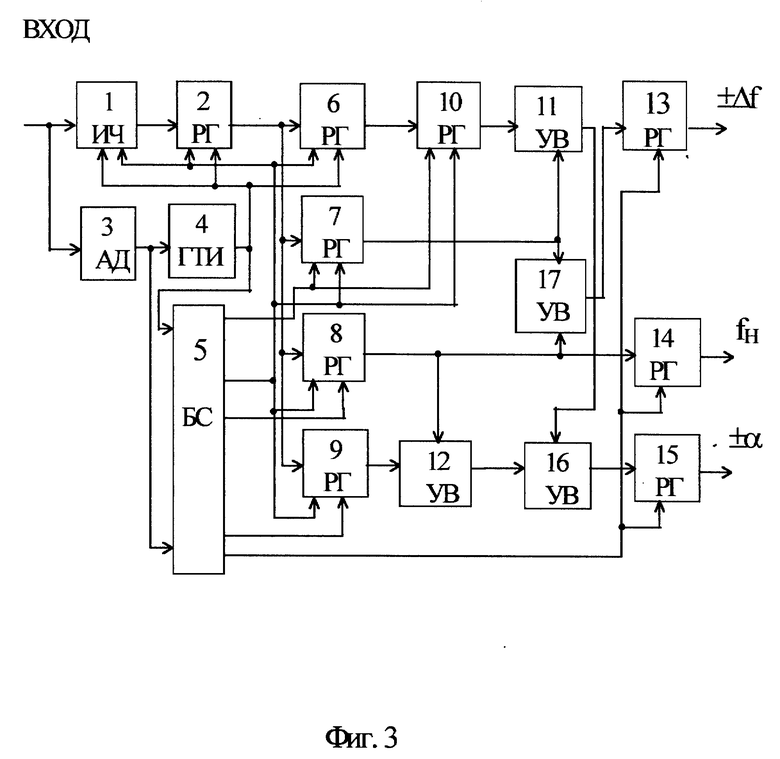
| Новоселов О.Н | |||
| и др | |||
| Основы теории и расчета информационно-измерительных систем | |||
| - М.: Машиностроение, 1991, с | |||
| 336 | |||
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЛИНЕЙНОГО ИЗМЕНЕНИЯ ЧАСТОТЫ ВНУТРИ ИМПУЛЬСА | 1989 |
|
RU2010243C1 |
| US 4904930 A, 27.07.90 | |||
| Огнетушитель | 0 |
|
SU91A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕРМОСТОЙКИХ КАТИОНИТОВ | 1972 |
|
SU418498A1 |
