UH
и%
(X
:л
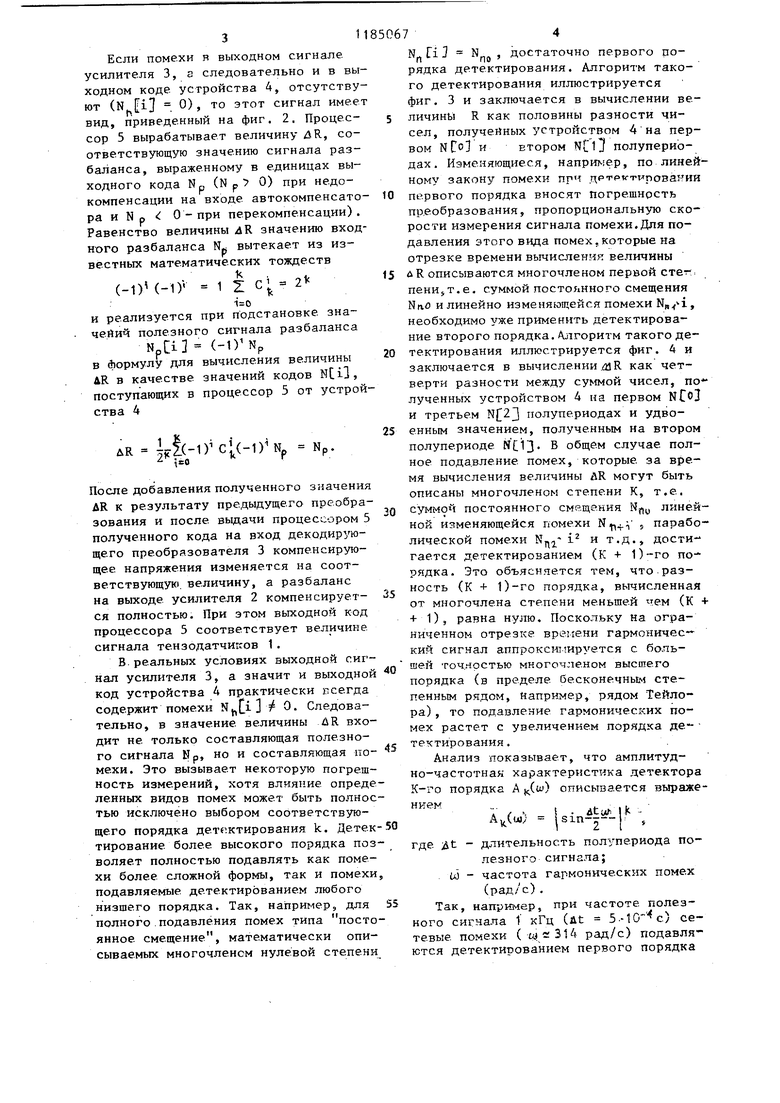
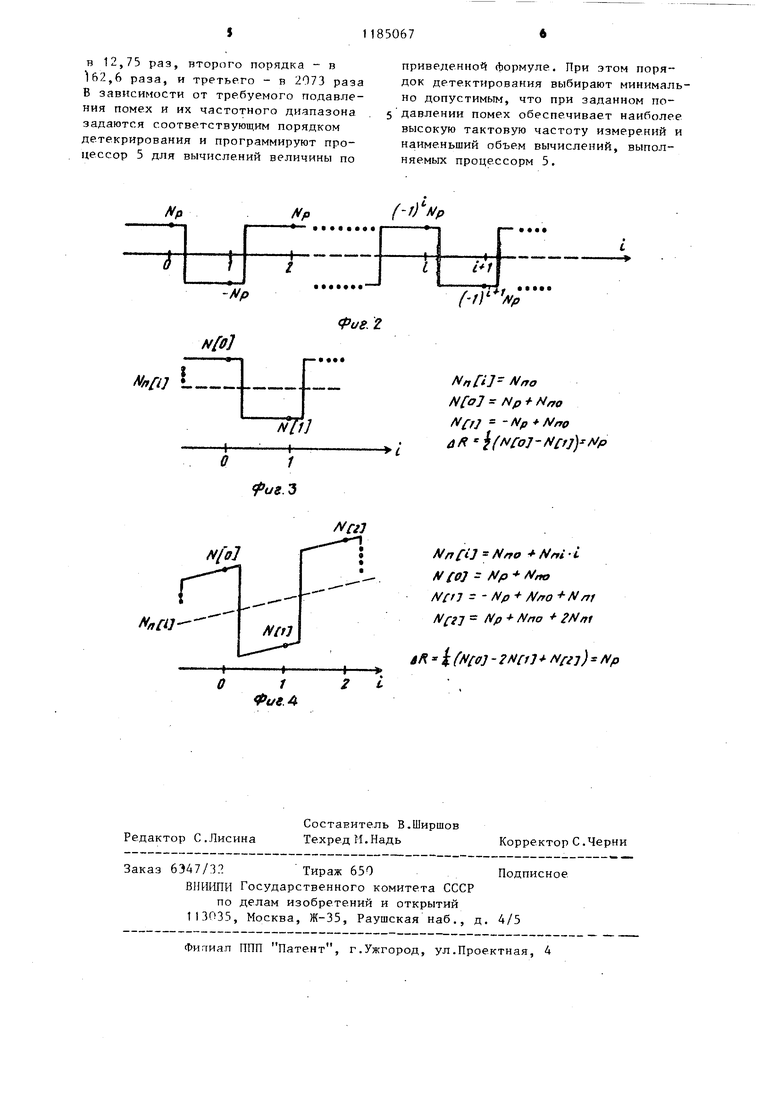
э Изобретние относится к измерительной технике, в частности к электрическим тензометрам, и может быть использовано, например, в устройствах для измерения веса.5 Цель изобретения - повышение точности за счет расширения диапазона подавляемых прМех. Нафиг. 1 показана функциональная блок-схема предлагаемого цифро- 10 .вого тензопреобразователя; на фиг.24 графики, поясняющие работу преобразователя. Тензопреобразователь содержит тензодатчики Т, декодирующий преоб- 15 разовате.ль 2, предварительный усилитель 3, кодирующее устройство 4, процессор 5, генератор 6 питания. Koдирующее устройство 4 и программируемый процессор 5 -совместно образу- 20 ют аналого-цифровой детектор 7. Декодирующий преобразователь 2, предва/рительный усилитель 3 и аналого-цифровой детектор 7 образуют следящий автокомпенсатор. -25 Цифровой тензопреобразователь работает следующим образом. Генератор 6 вырабатывает перемен ные напряжения, например, прямоугольной формы для питания тензодатчиков 1 и декодирующего преобразователя 2, а также синхронизирует работу кодирующего устройства 4 и программируемого процессора 5. Выходной сигнал предварительного усилителя 3 содер- 35 жит полезную составляющую сигнала разбаланса между измеряемым и компенсирующим напряжениями (фиг 2), а также аддитивные помехи, обусловленные дрейфом -нуля этого усилителя, 0 наводками от промьшленной сети электропитания и т.п. Ослабление влияния этих помех на результат измерения осуществляется при детектировании выходного сигнала усилителя 3. Отличительной особенностью устройства является детектирование, этого сигнала в цифровой форме, выполняемое аналого-цифровым детектором по приведенному ниже алгоритму. На каждом i-ном 50 полупериоде (i О, 1, 2,...k) текущего такта измерения кодирующее устройство 4 вырабатывает некоторые числа , соответствующие выходному .сигналу усилителя 3 и равные, сумме. 55 числовых эквивалентов полезного сигнала разбаланса NTi и сигнала помечисгде пре пен обе 5 к зов тор irN щем дел обе из сту про лич где .В д ной ем NpCij + . выхода устройства 4 полученные а N 1 поступают в процессор 5, формируется очередной результат бразования. ледящий режим и необходимая степомехозащищенности измерений печивается тем, что в процессоре результату предьщущего преобрания добавляется величина R, коя равна разности k-ro порядка чисел , поступивщих на текутакте измерения в процессор 5, нной на 2 и взятой со знаком, печивающим суммирование первого исел NfiJ. При этом по мере поления данных от устройства 4 ессор 5 производит вычисления вены йК по выражаению Л11),с, 1|-(1), N- оператор вычисления разности k-ro порядка чисеп , вырабатываемых кодирующим устройством 4 в течение цикла измерения;i - номер полупериода полезного сигнала в текущем цикле измерения, i О, 1, 2,...k; i k С, 7i7тr-j-- заданные в программе процессора 5 биноминальные коэффициенты k - 1 X 2 X X 3 X ... X k; (-1) - множитель, обеспечивающий суммирование первого из чисел (N,ej) при вьиислении разности k-ro порядка (введен для . общности записи операторной формы выражения льнейщем вычисления по приведенформуле именуются детектировани-ro порядка. Если помехи в выходном сигнале, усилителя 3, а следовательно и в выходном коде устройства 4, отсутствуют (N ij 0), то этот сигнал имеет вид, приведенный на фиг. 2. Процессор 5 вырабатывает величину ДК, соответствующую значению сигнала разбаланса, выраженному в единицах выходного кода NP (Nр 0) при недокомпенсации на входе автокомпенсатора и N р ; О - при перекомпенсации). Равенство величины 4R значению входного разбаланса N.J вытекает из известных математических тождеств (-1)4-1) 1 Z и реализуется при подстановке значейич полезного сигнала разбаланса N Ci (-iVNp в формулу для вычисления величины AR в качестве значений кодов , поступающих в процессор 5 от устрой ства 4 да Д((-1)Нр Np. После добавления полученного значения AR к результату предыдущего преобразования и после, вьщачи процессором 5 полученного кода на вход декодирующего преобразователя 3 компенсирующее напряжения изменяется на соответствующую, величину, а разбаланс на выходе усилителя 2 компенсируется полностью. При зтом выходной код процессора 5 соответствует величине сигнала тензодатчиков 1 . В.реальных условиях выходной сиг нал усилителя 3, а значит и выходной код устройства 4 практически всегда содержит помехи 0. Следовательно, в значение величины ДК вхо дит не только составляющая полезного сигнала Ыр, но и составляющая по мехи. Это вызывает некоторую погрешность измерений, хотя влияние опреде ленных видов помех может быть полнос тью исключено выбором соответствующего порядка дете.ктирования k. Детек тирование более высокого порядка поз воляет полностью подавлять как помехи более сложной формы, так и помехи подавляемые, детектированием любого низшего порядка. Так, например, для полного.подавления помех типа посто янное смещение, математически описываемых многочленом нулевой степени Nj Ti J N , достаточно первого порядка детектирования. Алгоритм такого детектирования иллюстрируется фиг. 3 и заключается в вычислении величины R как половины разности чисел, полученных устройством 4 на первом NCol и втором NCO полупериодах. Изменяющиеся, напри ер, по линейному закону помехи при дртр -т ровании первого порядка вносят погрешность преобразования, пропорциональную скорости измерения сигнала помехи. Для подавления этого вида помех,которые на отрезке времени вь численн.я величины uR описываются многочленом первой стег neHHjT.e. суммой nocTOJiHHoro смещения НцО и линейно изменяющейся помехи NR, необходимо уже применить детектирование второго порядка. Алгоритм такого детектирования иллюстрируется фиг. 4 и заключается в вычислении .(HR как четверти разности между суммой чисел, по лученных устройством 4 на первом и третьем Nf23 полупериодах и удвоенным значением, полученным на втором полупериоде В общем случае полное подавление помех, которые за время вычисления величины &R могут быть описаны многочленом степени К, т.е.. суммой постоянного смещения линейной изменяющейся помехи N. р параболической помехи Кд. и т.д., дости- гается детектированием (К + 1)-го порядка. Это объясняется тем, что разность (К + 1)-го порядка, вычисленная от многочлена степени меньшей чем (К 4+ 1), равна нулю. Поскольку на ограниченном отрезке времени гармоничес кий сигнал аппрокс№.шруется с большей точностью мкогоч.пеном высшего порядка (в пределе бесконечные степенным рядом. Например, рядом Тейлора) , то подавление гармонических помех растет с увеличением порядка де- тектирования. Анализ показывает, что амплитудно-частотная характеристика детектора К-го порядка А ((ш) описывается выражениемА,ХШ) lsin-r где - длительность полупе.риода полезного сигнала; U) - частота гармонических помех (рад/с), Так, например, при частоте полезного сигнала 1 кГц (at S.-tO- c) сетевые помехи ( рад/с) подавляются детектированием первого порядка
в 12,75 раз, второго порядка - в 1б2,6 раза, и третьего - в 2073 раза В зависимости от требуемого подавления помех и их частотного диапазона задаются соответствующим порядком детекрирования и программируют процессор 5 для вычислений величины по
/VP
/КР
приведенной формуле. При этом порядок детектирования выбирают минимально допустимым, что при заданном подавлении помех обеспечивает наиболее высокую тактовую частоту измерений и наименьший объем вычислений, выполняемых проце.ссорм 3.
Л/;Ч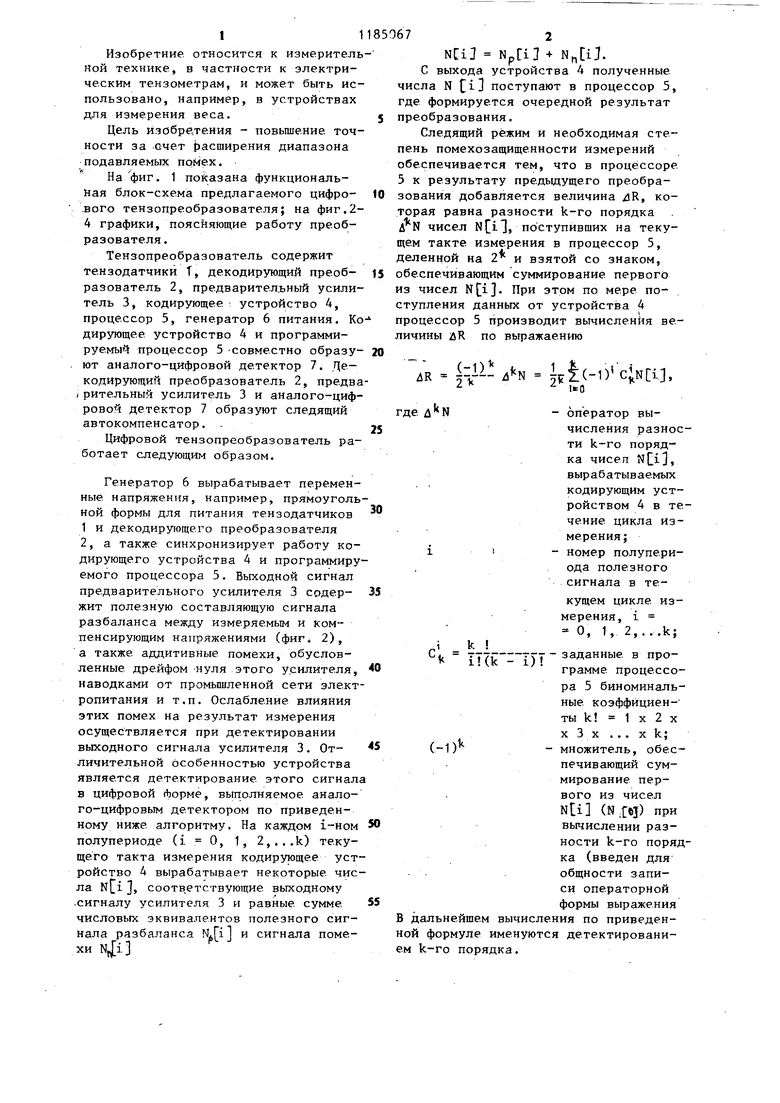
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой тензопреобразователь | 1985 |
|
SU1303836A1 |
| Бесконтактное тензометрическое устройство для динамических измерений | 1984 |
|
SU1186939A2 |
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| Цифровое тензометрическое устройство | 1983 |
|
SU1137322A1 |
| Тензометрическое цифровое устройство | 1981 |
|
SU1049749A1 |
| Тензопреобразователь давления мостового типа | 2019 |
|
RU2731033C1 |
| Способ цифровой фильтрации периодических помех в тензометрических весах и тензометрическое устройство с цифровой фильтрацией периодических помех | 1980 |
|
SU932256A1 |
| Автокомпенсатор для тензометрических весов | 1982 |
|
SU1044998A1 |
| Тензометрическое устройство | 1979 |
|
SU870965A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ МОСТОВЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391655C2 |
ЦИФРОВОЙ ТЕНЗОПРЕОБРАЗОВАТЕЛЬ, содержащий тенэодатчики и цифровой автокомпенсатор следящего действия с декодирующим преобразователем и предварительным усилителем, к входам которого подключены выходы тензодатчиков и декодирующего преобразователя, и iенератор питания, подключенный к входам питания тензодатчиков и декодирующего преобразователя, отличающийся тем, что, с целью повышения точности за счет расширения диапазона подавляемых помех, в него введен аналогоцифровой детектор, выполненный в виде кодирующего устройства и программируемого процессора, причем выход предварительного усилителя подключен к информационному входу кодирующего устройства, выходы которого соединены с входами программируемого процессора, выходами подключенного к входам декодирующего преобразова(Л теля, а входы синхронизации кодирующего устройства и программируемого процессора подключены к выходам генератора питания.
Ф1
NaCHN111
ФигЛ
f nfiJffno f/ Oj - /V/o /Vm
/V/-/7 NP + Nfro +Nnf Nno //V/7f
tf(i ( - ) Л/)
| Бесконтактное тензометрическое устройство для динамических измерений | 1979 |
|
SU785655A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
