Изобретение относится к весоизмерительной технике и может быть использовано для тензометрирования динамических процессов в цифровых весах и дозаторах.5
Цель изобретения - повышение точности и быстродействия измерений за счет повышения тактовой частоты измерений и расширение диапазона подавляемых помех. О
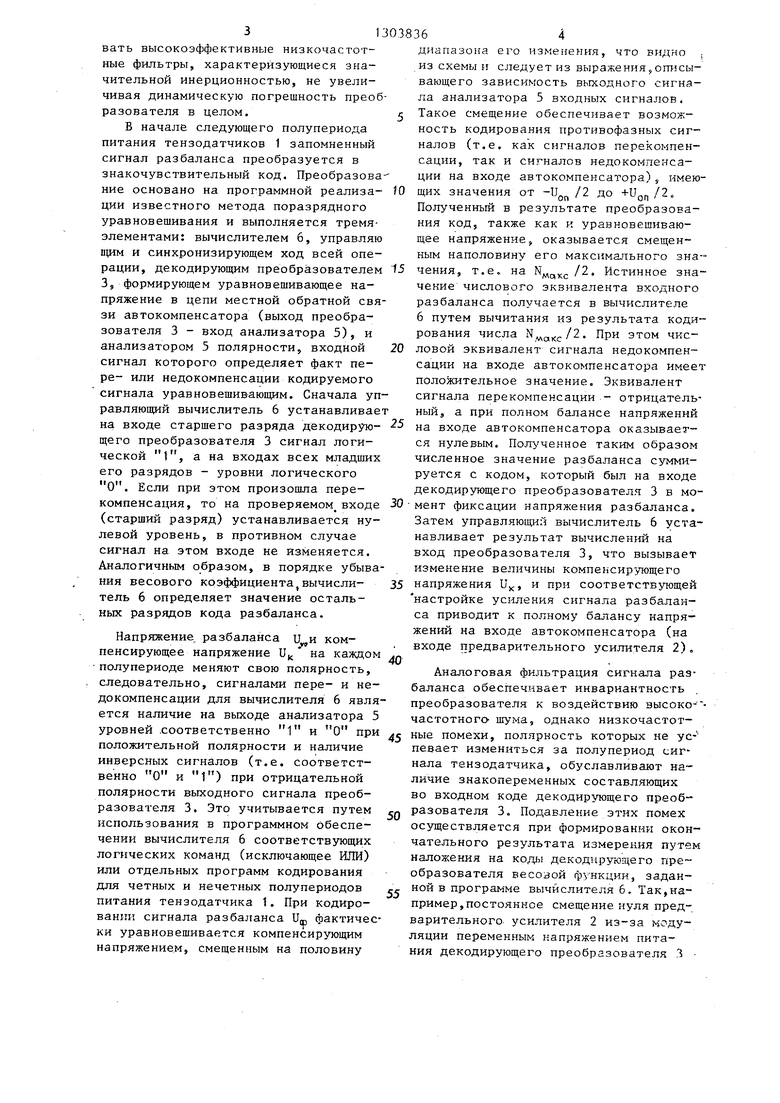
На фиг.1 приведена схема тензопре- образователяJ на фиг.2 - временные диаграммы работы тензопреобразователя.
Выходной сигн ал тензодатчиков 1 j Uj непрерывно измеряется автокомпенсатором следящего действия, который объединяет все остальные элементы преобразователя. Предварительный усилитель.2 усиливает разбаланс между 20 измеряемым U и компенсирующим U напряжениями. Последнее из них пропорционально коду N на входе декодирующего преобразователя 3, имеет полярность, противоположную питающему 25 напряжению (11,, ) , и при максимальном значении входного кода равно по величине этому напряжению:
и, -и„п при N N
Макс
Низкочастотный фильтр с обнулением и фиксацией 4 обеспечивает подавление высокочастотных помех в выходном сигнале предварительного усилителя 2, а также запоминание отфильтрованного сигнала на концах полупериодов питания тензодатчиков 1. В зависимости от комбинаций логических уровней синхросигналов Ф1, Ф2 (pHC.2S) этот элемент выполняет одну из трех операций: автоматическое задание нулевых началь- ных условий фильтрации (сброс),фильтрацию входного -сигнала или запоминание (фиксацию) уровня своего выходного сигнала. Такой фильтр может быть реализован,например,на базе одного или нескольких интеграторов со сбросом и запоминанием, включенных по схеме, моделирующей дифференциальное уравнение выбранного фильтра. Анали- затор 5 определяет полярность суммы
выходного сигнала фильтра 4 Ц
Чо
вы
ходного и и входного Up напряжений декодирующего преобразователя 3,взятых с коэффициентами соответственно Кр, К и К/2. При положительной по- лярности указанной суммы напряжений выходной сигнал анализатора U имеет уровень логической 1, а при отрицательной - уровень логического
О, что в соответствии с выражениями, определяющими выходной сигнал декодирующего -преобразователя 3,можно выразить следующим образом:
Ки
(N
макс
/2 О при KpU, + К и,, (N„,,/2 - - N) S 0.
0 5
0
Анализатор такого вида может быть выполнен из последовательно включенных суммирующего усилителя и схемы сравнения, на один из входов которой задан нулев.ой потенциал,
Управляющий вычислитель b выполняет вычислительно-логические операции, обеспечивающие измерение сигнала U методом следящего уравновешивания с поразрядным кодированием сигнала разбаланса, цифровую фильтрацию с вычис- лением заданной в его программе весовой функции,, выдачу результата измерения на выходную шину, а также синхронизацию режимов работы низкочастотного фильтра 4 и формирователя прямоугольных напряжений 7, вырабатывающего знакопеременные напряжения питания тензодатчиков 1 и декодирующего преобразователя 3 , .
Тензопреобразователь работает следующим образом.
В середине каждого полупериода сигнала тензодатчика 1 (фиг.2q),когда импульсные помехи, возникающие на его фронтах, затухают практически полностью, синхросигналы Ф1 и Ф2 изменяют свое состояние, так, что фильтр 4 переходит из режима установки нулевых начальных условий в режим фильтрации сигнала разбаланса между измеряемым. U, и компенсирующим U напряжениями. Фильтрация обеспечивает подавление высокочастотных помех в выходном сигнале предварительного , усилителя 2, протекает в течение фиксированного интервала времени и завершается запоминанием (фиксацией) уровня отфильтрованного сигнала Иф при появлении на конце полупериода соответствуюш,ей комбинации синхросигналов Ф1 и Ф2о Предварительное задание нулевых начальных условий фильтрации обеспечивает инвариантность запоминаемого сигнала и« по отношению к его значениям на предыдущих полупериодах. Это позволяет использовать высокоэффективные низкочастотные фильтры, характеризующиеся значительной инерционностью, не увеличивая динамическую погрешность преобразователя в целом.
В начале следующего полупериода питания тензодатчиков 1 запомненный сигнал разбаланса преобразуется в знакочувствительный код. Преобразование основано на программной реализа- ции известного метода поразрядного уравновешивания и выполняется тремя- элементами: вычислителем 6, управляю нщм и синхронизирующем ход всей операции, декодирующим преобразователем 3, формирующем уравновешивающее напряжение в цепи местной обратной связи автокомпенсатора (выход преобразователя 3 - вход анализатора 5), и анализатором 5 полярности, входной сигнал которого определяет факт пере- или недокомпенсации кодируемого сигнала уравновешивающим. Сначала управляющий вычислитель 6 устанавливает на входе старшего разряда декодирую- щего преобразователя 3 сигнал логической 1, а на входах всех младших его разрядов - уровни логического О. Если при этом произошла перекомпенсация, то на проверяемом входе
(старший разряд) устанавливается нулевой уровень, в противном случае сигнал на этом входе не изменяется. Аналогичным образом, в порядке убывания весового коэффициента вычисли- тель 6 определяет значение остальных разрядов кода разбаланса.
Напряжение разбаланса и,и компенсирующее напряжение U на каждом полупериоде меняют свою полярность, следовательно, сигналами пере- и недокомпенсации для вычислителя 6 является наличие на выходе анализатора 5 уровней .соответственно 1 и О при положительной полярности и наличие инверсных сигналов (т.е. соответственно О и 1) при отрицательной полярности выходного сигнала преобразователя 3. Это учитывается путем использования в программном обеспечении вычислителя 6 соответствующих логических команд (исключающее ИЛИ) или отдельных программ кодирования для четных и нечетных полупериодов питания тензодатчика 1. При кодировании сигнала разбаланса фактически уравновешивается компенсирующим напряжением, смещенным на половину
0 5 0
0
5
п е
диапазона его изменения, что вид-но . из схемы и следует из выражения,описывающего зависимость выходного сигнала анализатора 5 входных сигналов. Такое смещение обеспечивает возможность кодирования противофазных сигналов (т.е. как сигналов перекомпенсации, так и сигналов недокомпенсации на входе автокомпенсатора), имеющих значения от -U /2 до +Ugf, /2. Полученный в результате преобразования код, также как и уравновешивающее напряжение, оказывается смещенным наполовину его максимального значения, т.е. на N„1 /2. Истинное значение числового эквивалента входного разбаланса получается в вычислителе 6 путем вычитания из результата кодирования числа N,,/2. При этом числовой эквивалент сигнала недокомпенсации на входе автокомпенсатора имеет положительное значение. Эквивалент сигнала перекомпенсации - отрицательный, а при полном балансе напряжений на входе автокомпенсатора оказывается нулевым. Полученное таким образом численное значение разбаланса суммируется с кодом, который был на входе декодирующего преобразователя 3 в момент фиксации напряжения разбаланса. Затем управляющий вычислитель 6 устанавливает результат вычислений на вход преобразователя 3, что вызывает изменение величины компенсирующего напряжения U, и при соответствующей настройке усиления сигнала разбаланса приводит к полному балансу напряжений на входе автокомпенсатора (на входе предварительного усилителя 2).
Аналоговая фильтрация сигнала разбаланса обеспечивает инвариантность . преобразователя к воздействию высоко- - частотного- шума, однако низкочастотные помехи, полярность которых не ус- певает измениться за полупериод сигнала тензодатчика, обуславливают наличие знакопеременных составляющих во входном коде декодирующего преобразователя 3. Подавление этих помех осуществляется при формировании окончательного результата измерения путем наложения на кодь; декодирующего преобразователя весовой функции, заданной в программе вычислителя 6, Так,например, постоянное смещение нуля предварительного усилителя 2 из-за модуляции переменным напряжением питания декодирующего преобразователя .3
51 30
в пропессе следящего уравиопешива- ния вызывает появление на входе последнего соответствующей AeanH iopSia- тивной составляющей сигнала: следующих друг за другом одинаковых по величине, но противоположных по знаку числовых отсчетов. Для полного подавления таких помех достаточно использовать обычное усреднение двух следующих друг за другом числовых отсчетов. Более эффективное подавление низкочастотных помех может быть получено при программировании управляющего вычислителя 6 для реализации более сложных весовых функций, например, основанных на усреднении числовых отсчетов, взятых с весовыми коэффидиен- тами 1,2,1 или 1,3,3,1.
Вычисление нового результата измерения выполняется на каждом полупериоде во время фильтрации сигнала разбаланса, а вьщача полученного значе- ния осуществляется в промежутке между окончанием фильтрации и началом кодирования этого сигнала и сопровождается синхросигналом ФЗ (фиг.2)).
,При равных значениях частоты питания тензодатчиков и аналогичных не- совых функциях, т.е. при одинаковом подавлении низкочастотных помех,тактовая частота измерений устройства в столько раз выше, чем у прототипа, каков порядок весовой функции. Кроме того, аналоговая фильтрациясигнала разбаланса обеспечивает дополнитель - ное подавление высокочастотных помех вообще и помех, частота которых кратна удвоенному значению частоты питания тензодатчиков в частности.
58 S6
Формула изобретения
Цифровой тензопреобразователь, со держащий тензодатчики, вход которых подключен к первому выходу формирователя прямоугольных напряжений, а выход - к первому входу предварительного усилителя, отличающий- с я тем, что, с целью повышения быстродействия и точности измерений,в него введены низкочастотный фильтр с обнулением и фиксацией и кодирующе- декодирующий вычислитель, состоящий из управляющего вычислителя, декодирующего преобразователя и анализатора полярности, причем вход низкочастотного фильтра с обнулением и фиксацией соединен с выходом предварительного усилителя, выход - с первым входом анализатора полярности, а два входа синхронизации этого фильтра подключены, соответственно, к первому и второму выходам управляющего вычислителя, вход которого соединен с выходом анализатора полярности, третий
выход управляющего вычислителя подключен к входу формирователя прямоугольных -напряжений, второй выход которого соединен с вторым входом анализ атора полярности и с аналоговым входом декодирующего преобразователя, подключенного выходом к третьему входу анализатора полярности и второму входу предварительного усилителя,
-остальные выходы управляющего вычислителя поразрядно соединены с цифровыми входами декодирующего преобразователя и образуют выходную шину тензопреобразователя.
а У
S
iW,Pf | луш/г зд t gr ;/ffl ya Ptf/ rg... .1.™
S РЗ
Редактор Э. Слиган
Составитель М Хаустов
Техред л.Сердюкова Корректор Л. Патай
Заказ 1296/40 Тираж 694Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Троизводственно-полиграфическое предприятие, г, Ужгород, ул. Проектная,4
t
&
г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактное тензометрическое устройство для динамических измерений | 1984 |
|
SU1186939A2 |
| Цифровой тензопреобразователь | 1984 |
|
SU1185067A1 |
| Цифровое тензометрическое устройство | 1983 |
|
SU1137322A1 |
| Способ цифровой фильтрации периодических помех в тензометрических весах и тензометрическое устройство с цифровой фильтрацией периодических помех | 1980 |
|
SU932256A1 |
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| Цифровое тензометрическое устройство | 1977 |
|
SU684326A1 |
| Тензометрическое устройство | 1979 |
|
SU870965A1 |
| Автокомпенсатор для тензометрических весов | 1982 |
|
SU1044998A1 |
| Цифровое устройство управления весовым дискретным дозированием | 1980 |
|
SU932258A1 |
| ЦИФРОВОЙ ФИЛЬТР | 2008 |
|
RU2383990C2 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность и быстродействия измерений за счет повышения тактовой частоты измерений и расширение диапазона подавляемых помех. Кодирующе- декодирующий вычислитель состоит из управляющего вычислителя 6, декодирующего преобразователя 3 и анализатора 5 полярности. Кодирутоще-декоди- рзтощий вычислитель поочередно выполняет либо формирование компенсирующего напряжения в цепи главной обратной связи для выделения входного раэ баланса автокомпенсатора (предварительного усилителя 2), либо кодирование выделенного сигнала разбаланса с использованием местной обратной связи, либо вычислительно-логические операции, обеспечивающие работу тен- зопреобразователя по заданному алгоритму. 2 ил. Q S (П
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровой тензопреобразователь | 1984 |
|
SU1185067A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
