Изобретение относится к контрольно-измерительной технике для измерения механических напряжений и деформаций, магнитной и механической анизотропии в ферромагнитных материалах изделий и может быть использовано во всех областях машиностроения.
Целью изобретения явлйется повышение точности измерения механических напряжений и деформаций пут.е автоматического устранения влияния неоднородности магнитных свойств исследуемого объекта на результаты контроля.
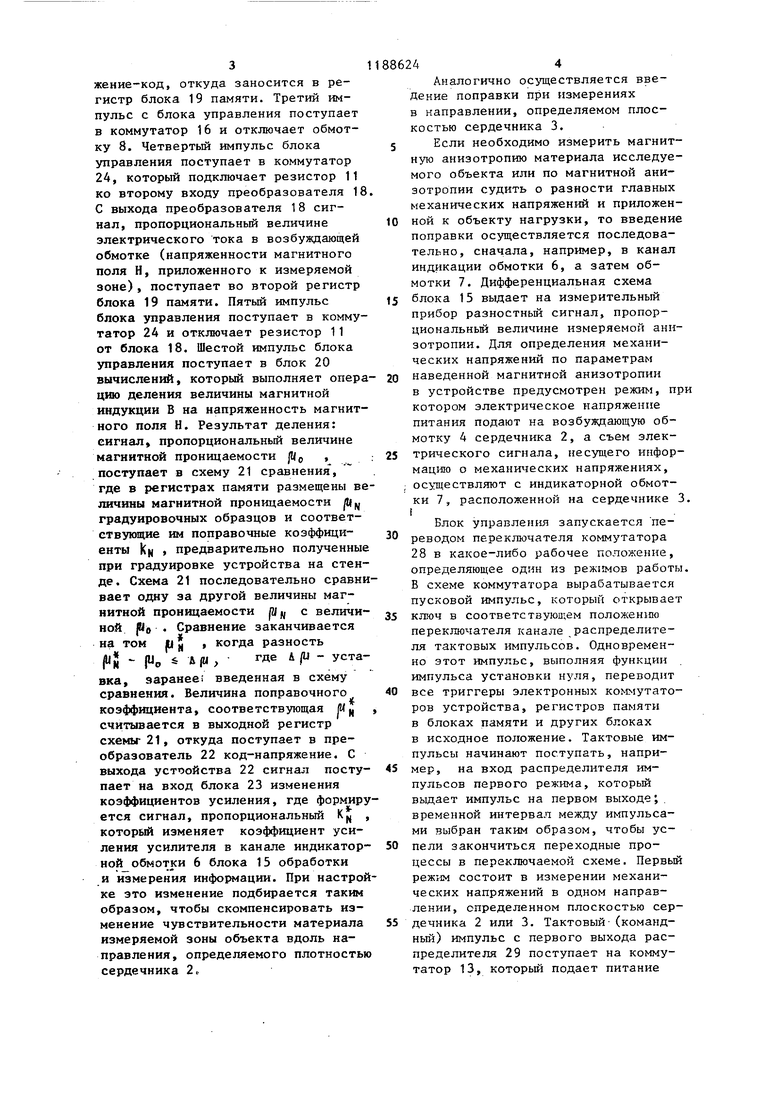
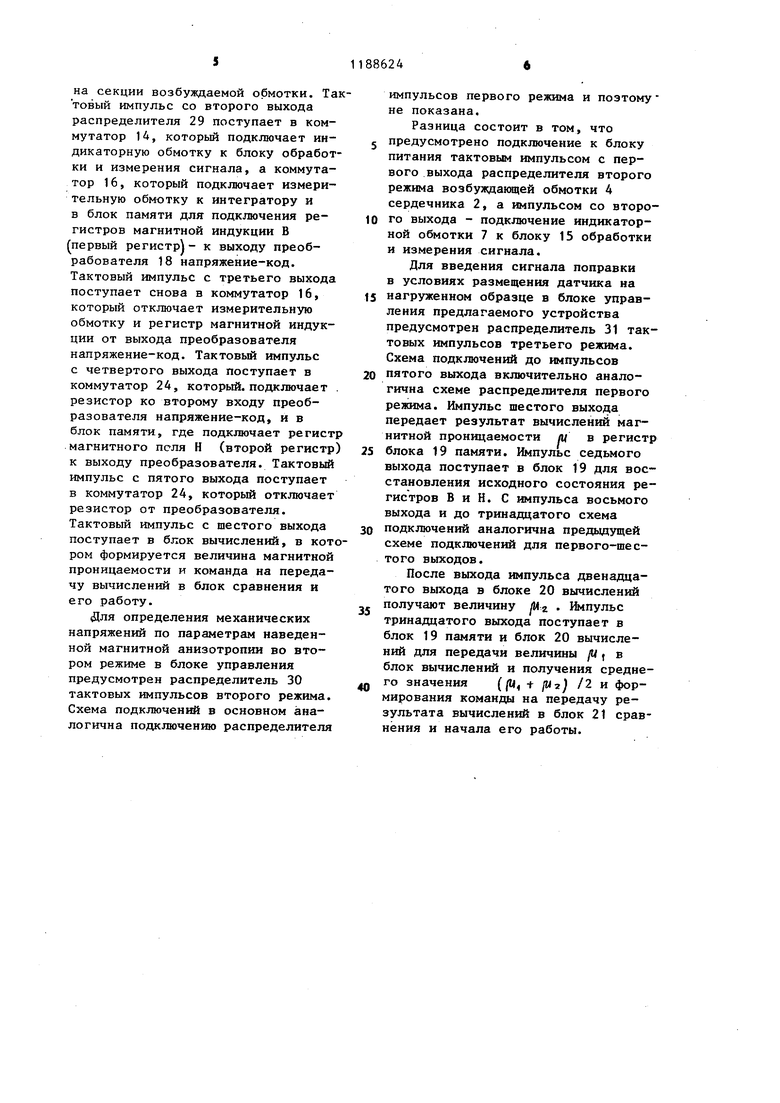
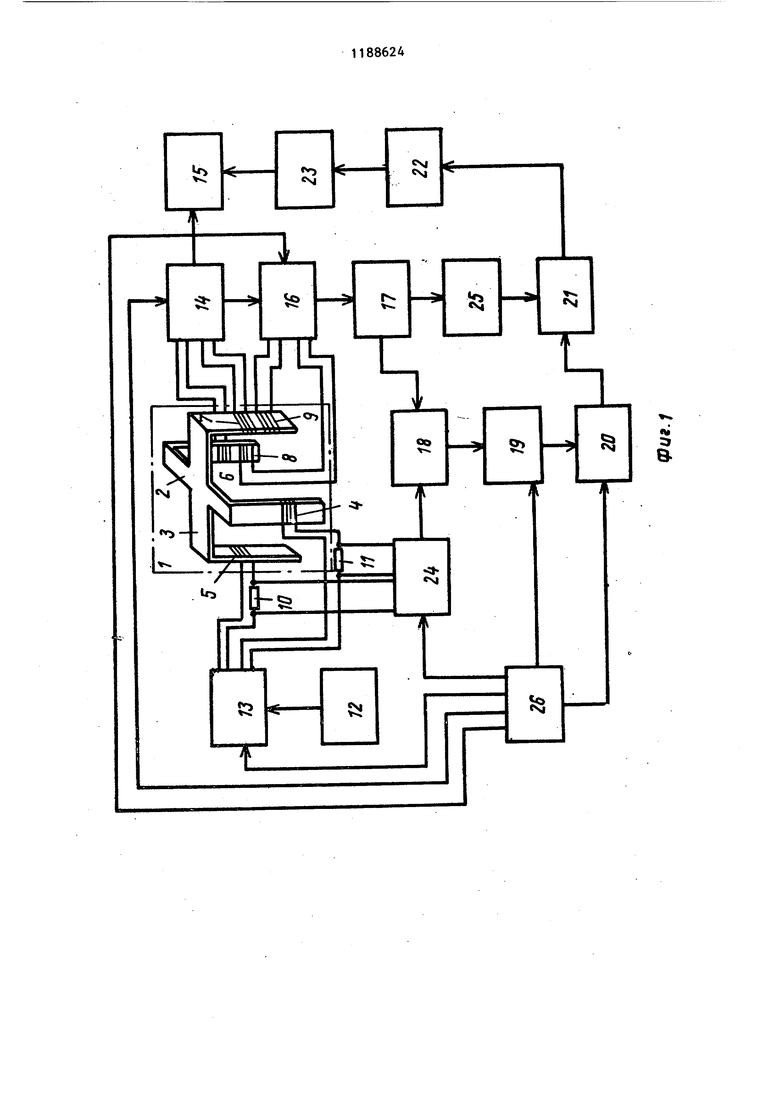
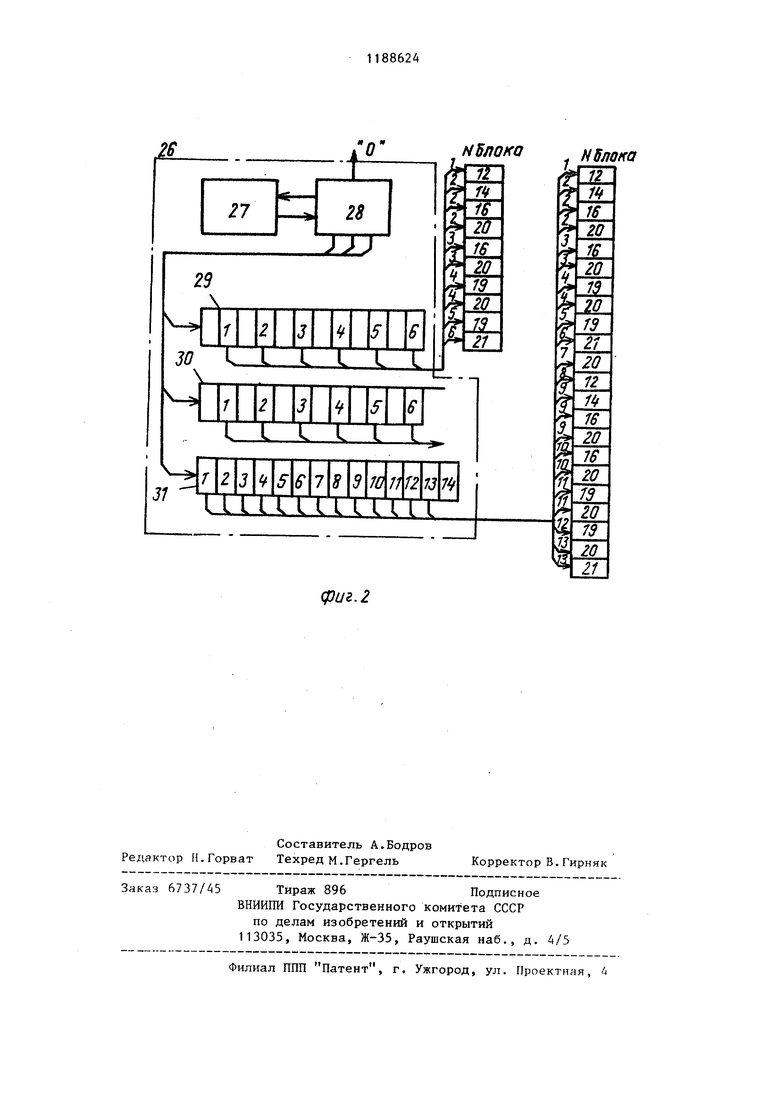
На фиг. 1 представлена структурная схема устройства; на фиг. 2 структурная схема блока управления устройства.
Устройство содержит электромагнитный датчик 1 в виде П-образных сердечников 2 и 3, соединенных крестообразно под прямым углом, на которых размещены возбуждающие обмотки 4 и 5, индикаторные обмотки 6 и 7 и измерительные обмотки 8 и 9. Возбуждающие обмотки, последовательно с которыми включены резисторы 10 и 11, соединены с блоком 12 питания через коммутатор 13. Индикаторные обмотки через коммутатор 14 подключены к первому входу блока 15 обработки и измерения сигнала.
Измерительные обмотки через коммутлтор 16 подключены к интегратору 17, своим входом соединенным с первым входом преобразователя 18 напряжение-код. Преобразователь 18 напряжение-код подключен к первому входу блока 19 памяти, кото1М 1й своим выходом соединен с первым входом блока 20 вычислений. Выход блока 20 вычислений подключен к первому входу схемы 21 сравнения, выход которой через последовательно включенные между собой преобразователь 22 код-напряжение, блок 23 изменения коэффициентов усиления подключен ко второму входу блока 15 обработки и измерения сигнала. Со вторым входом преобразователя 18 напряжение-к од соединен выход кс мутатора 24, ко входам которого подключены резисторы 10 и 11. Ко второму входу схемы сравнения подключен блок 25 коэффициентов коррек ции. Выходы блока 26 управления соединены соответственно с входами
всех коммутаторов 13, 14, 16 и 24, блока 19 памяти и блока 20 вычислений.
Блок 26 управления содержит генератор 27 тактовых (командных) импульсов, коммутатор 28 режимов работы и распределители 29-31 тактвых импульсов соответственно первого, второго и третьего режимов.
Устройство работает следующим образом.
Электромагнитный датчик 1 устанавливают полюсами сердечников на исследуемую поверхность (не показана) . Включают блок 12 питания, который запитывает блоки устройств (линии питания показаны частично). В блоке 26 управления генератор командных импульсов вырабатьшает последовательности импульсов, которые определяют работу устройства в режимах измерения механических деформаций в одном направлении, определяемом плоскостью сердечника 2 или 3, и измерения разности деформаций в двух взаимно перпендикулярных направлениях с учетом ус;ловий введения поправки. Режимы работы задают с помощью переключате|лей блока 26 управления. Электромагнитный датчик 1 поворачивают на измеряемой поверхности, чтобы выбранное направление совпало с направлением определенным пересечением измеряемой поверхности и, например, плоскости сердечника 2.
Устанавливают переключатель бло 26 управления в положение, соответствующее измерениям с помощью сердечника 2. Первый командньй импульс поступает на коммутатор 13, который подключает к блоку 12 питания возбуждающую обмотку 4. Через интервал времени, необходимый для завершения переходного процесса в обмотке 4, блок 26 управления выдает второй импульс в коммутатор 1 который подключает индикаторную обмотку 6 к блоку 15 обработки и измерения сигнала, и в коммутатор 16, который подключает измерительную обмотку 8 к интегратору 17. С выхода интегратора 17 электрическое напряжение, пропорциональное магнитной индукции В в материале измеряемой зоны, поступает на пер|ВЫй вход преобразователя 18 напря3жение-код, откуда заносится в регистр блока 19 памяти. Третий импульс с блока управления поступает в коммутатор 16 и отключает обмотку 8. Четвертый импульс блока управления поступает в коммутатор 24, который подключает резистор 11 ко второму входу преобразователя 1 С выхода преобразователя 18 сигнал, пропорциональный величине электрического тока в возбуждающей обмотке (напряженности магнитного поля Н, приложенного к измеряемой зоне), поступает во второй регистр блока 19 памяти. Пятый импульс блока управления поступает в коммутатор 24 и отключает резистор 11 от блока 18. Шестой импульс блока управления поступает в блок 20 вычислений, который выполняет опера цию деления величины магнитной индукции В на напряженность магнитного поля Н. Результат деления: сигнал пропорциональный величине магнитной проницаемости |Уо , поступает в схему 21 сравнения, где в регистрах памяти размещены ве личины магнитной проницаемости ptf градуировочных образцов и соответствующие им поправочные коэффициенты KN , предварительно полученные при градуировке устройства на стенде. Схема 21 последовательно сравни вает одну за другой величины магнитной проницаемости йц, с величиной (Uo . Сравнение заканчивается на том JU11 , когда разность JUJI - |и„ S &|Ы , где А /и - уставка, заранее; введенная в схему сравнения. Величина поправочного коэффициента, соответствующая Мц считывается в выходной регистр схемы 21, откуда поступает в преобразователь 22 код-напряжение. С выхода устп ойства 22 сигнал поступает на вход блока 23 изменения коэффициентов усиления, где формиру ется сигнал, пропорциональный К который изменяет коэффициент усиления усилителя в канале индикаторной обмотки 6 блока 15 обработки и измерения информации. При настрой ке это изменение подбирается таким образом, чтобы скомпенсировать изменение чувствительности материала измеряемой зоны объекта вдоль направления, определяемого плотностью сердечника 2 с 244 Аналогично осуществляется введение поправки при измерениях в направлении, определяемом плоскостью сердечника 3. Если необходимо измерить магнитную анизотропию материала исследуемого объекта или по магнитной анизотропии судить о разности главных механических напряжений и приложенной к объекту нагрузки, то введение поправки осуществляется последовательно, сначала, например, в канал индикации обмотки 6, а затем обмотки 7. Дифференциальная схема блока 15 выдает на измерительный прибор разностньй сигнал, пропорциональный величине измеряемой анизотропии. Для определения механических напряжений по параметрам наведенной магнитной анизотропии в устройстве предусмотрен режим, при котором электрическое напряжение питания подают на возбуждающую обмотку 4 сердечника 2, а съем электрического сигнала, несущего информацию о механических напряжениях, осуществляют с индикаторной обмотки 7, расположенной на сердечнике 3. Блок управления запускается переводом переключателя коммутатора 28 в какое-либо рабочее положение, определяющее один из режимов работы. В схеме коммутатора вырабатывается пусковой импульс, который открывает ключ в соответствующем положению переключателя канале распределителя тактовых импульсов. Одновременно этот импульс, выполняя функции импульса установки нуля, переводит все триггеры электронных KONLMyTaTOров устройства, регистров памяти в блоках памяти и других блоках в исходное положение. Тактовые импульсы начинают поступать, например, на вход распределителя импульсов первого режима, которьй вьщает импульс на первом выходе; временной интервал между импульсами выбран таким образом, чтобы успели закончиться переходные процессы в переключаемой схеме. Первьш режим состоит в измерении механических напряжений в одном направлении, определенном плоскостью сердечника 2 или 3. Тактовый-(командный) импульс с первого выхода распределителя 29 поступает на коммутатор 13, который подает питание
на секции возбуждаемой обмотки. Татовый импульс со второго выхода распределителя 29 поступает в коммутатор 14, который подключает индикаторную обмотку к блоку обработки и измерения сигнала, а коммутатор 16, который подключает измерительную обмотку к интегратору и в блок памяти для подключения регистров магнитной индукции В первый регистр)- к выходу преобрабователя 18 напряжение-код. Тактовый импульс с третьего выхода поступает снова в коммутатор 16, который отключает измерительную обмотку и регистр магнитной индукции от выхода преобразователя напряжение-код. Тактовый импульс с четвертого выхода поступает в коммутатор 24, который, подключает резистор ко второму входу преобразователя напряжение-код, и в блок памяти, где подключает регист магнитного псля Н (второй регистр к выходу преобразователя. Тактовый импульс с пятого выхода поступает в коммутатор 24, который отключает резистор от преобразователя. Тактовый импульс с шестого выхода поступает в блок вычислений, в котром формируется величина магнитной проницаемости и команда на передачу вычислений в блок сравнения и его работу.
Для определения механических напряжений по параметрам наведенной магнитной анизотропии во втором режиме в блоке управления предусмотрен распределитель 30 тактовых импульсов второго режима. Схема подключений в основном аналогична подключению распределителя
импульсов первого режима и поэтому не показана.
Разница состоит в том, что J предусмотрено подкхпочение к блоку питания тактовым импульсом с первого выхода распределителя второго режима возбуждающей обмотки А сердечника 2, а импульсом со второго выхода - подключение индикаторной обмотки 7 к блоку 15 обработки и измерения сигнала.
Для введения сигнала поправки в условиях размещения датчика на
5 нагруженном образце в блоке управления предлагаемого устройства предусмотрен распределитель 31 тактовых импульсов третьего режима. Схема подключений до импульсов
0 пятого выхода включительно аналогична схеме распределителя первого режима. Импульс шестого выхода передает результат вычислений магнитной проницаемости /м в регистр
5 блока 19 памяти. Импульс седьмого выхода поступает в блок 19 для восстановления исходного состояния регистров В и Н. С импульса восьмого выхода и до тринадцатого схема
0 подключений аналогична предыдущей схеме подключений для первого-шестого выходов.
После выхода импульса двенадцатого выхода в блоке 20 вычислений
получают величину Шпульс тринадцатого выхода поступает в блок 19 памяти и блок 20 вычислений для передачи величины /U t в блок вычислений и получения среднего значения (/У + JU-z) /2 и формирования команды на передачу результата вычислений в блок 21 сравнения и начала его работы.
м ::
&
фиг. 2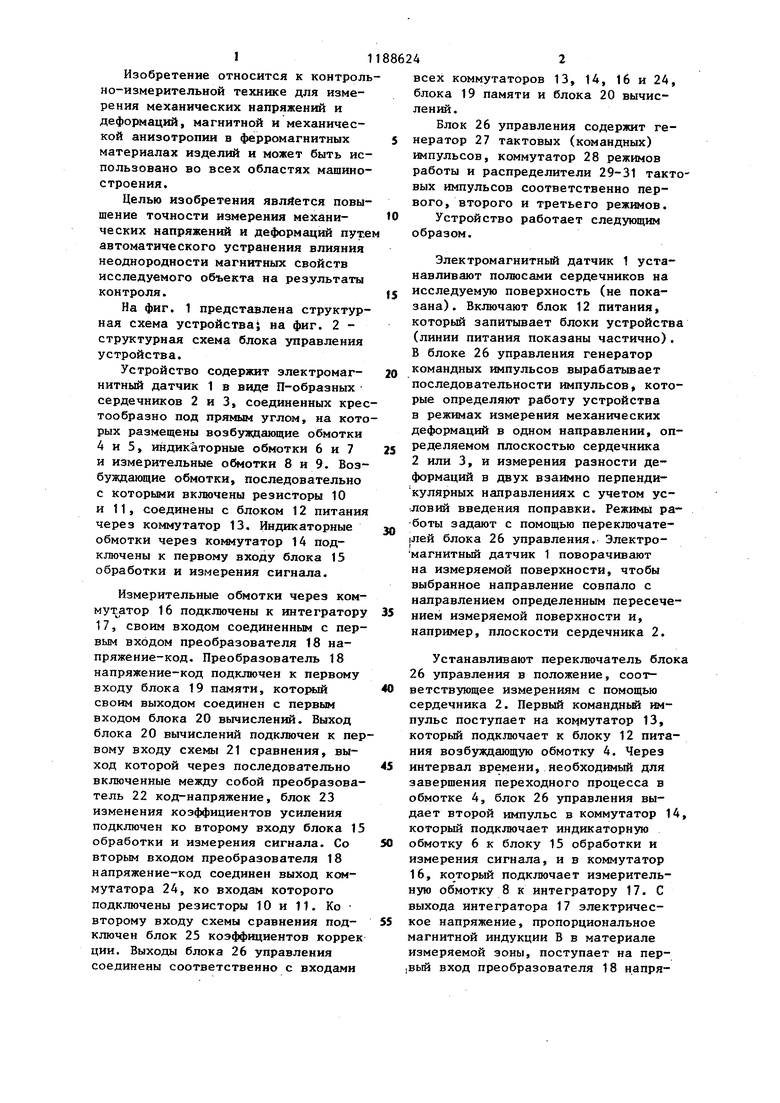
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой феррозондовый измеритель азимута | 1987 |
|
SU1492036A1 |
| Феррозондовый компас | 1987 |
|
SU1569547A1 |
| Устройство измерения напряжения химического источника тока | 1983 |
|
SU1096719A1 |
| Устройство для измерения магнитной проницаемости проводящего образца | 1989 |
|
SU1636819A1 |
| Система для регистрации и обработки индикаторных диаграмм | 1981 |
|
SU954839A1 |
| Устройство для измерения постоянного тока | 1986 |
|
SU1352383A1 |
| СПОСОБ БЕСКОНТАКТНОГО ЦИФРОВОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ТОКА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2176089C1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Устройство для вычисления показателя экспоненциальной функции | 1982 |
|
SU1043677A1 |
| Цифровая следящая система | 1979 |
|
SU924663A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ И АНИЗОТРОПИИ В ФЕРРОМАГНИТНЫХ ИЗДЕЛИЯХ, содержащее электромагнитный датчик, выполненный в виде двух взаимно перпендикулярных П-образных сердечников и размещенных на них возбуждающих и индикаторных обмоток, последовательно соединенные блок питания и электронный коммутатор, выход которого подсоединен к возбуждающим обмоткам, и блок обработки и измерения сигнала, включающий усилитель и дифференциальную схему, отличающееся тем, что, с целью повышения точности измерений, он снабжен вторым коммутатором, вход которого подключен к индикаторным обмоткам, а выход соединен с блоком обработки и из.мерения, двумя дополнительными измерительными обмотками Ш1дукт; вностн 5 расположенными аналогично Р.НДТТКЗторным обмоткам, последовательно соединенными третьим коммутатороь, интегратором, преобразователем напряжение - код, блоком памяти, блоком вычислений, схемой сравнения, преобразователем код-напряжение, блоком изменения коэффициентов усиления, выходом подключенным к блоку обработки и измерения ситца-ла, один вход третьехо .т:пч 1Г1л связан с дoпoлнитeJlьны iI нтмсм -и( тельными обмотками, другой -- г вторым коммутатором, двумя тм-.;:.;.торами, каждый из которьх {ж.шочеи tffs %ЯЙЖ1.. последовательно с соответствующей возбуждающей обмоткой, четвертым коммутатором, входом подко-поченным к резисторам каждой возбуждЭоЮией обмотки, а выходом - к вторс.ггу входу преобразователя напряжение - код, блоко:- коррекции ко.т1ффнциентов., вклочекным между интегратогом и О5 схемой сравнения, а также блоком ГчЭ управления, соединенным выходами 4 с вторым входом первого и В ОГ-ГО комг утаторов, с третьи:- вводом ичты:го коммутатора, с вторг п- м чеч вертогокоммутатора, с -. горкм . дом блока памяти и блока вычи.:;,.: :..u. 
| Способ испытаний хрупких материалов на термопрочность и устройство для его осуществления | 1980 |
|
SU926576A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ АНИЗОТРОПИИ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 0 |
|
SU397834A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
