(5) ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный преобразователь угла поворота вала в код | 1987 |
|
SU1462478A2 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2007 |
|
RU2352060C1 |
| Преобразователь телевизионного стандарта | 1981 |
|
SU1016850A1 |
| Устройство для контроля параметров электрических сигналов | 1983 |
|
SU1250971A1 |
| Устройство для ввода информации | 1984 |
|
SU1200272A1 |
| Многоканальный фазовый демодулятор | 1988 |
|
SU1555900A1 |
| Кабельный инклинометр | 1985 |
|
SU1317113A1 |
| Устройство для контроля передатчиков или приемников с импульсной частотной модуляцией | 1985 |
|
SU1246382A1 |
| Устройство для кодирования звуковых сигналов с инерционным компандированием | 1985 |
|
SU1356233A1 |
| Устройство для определения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1239657A1 |
}
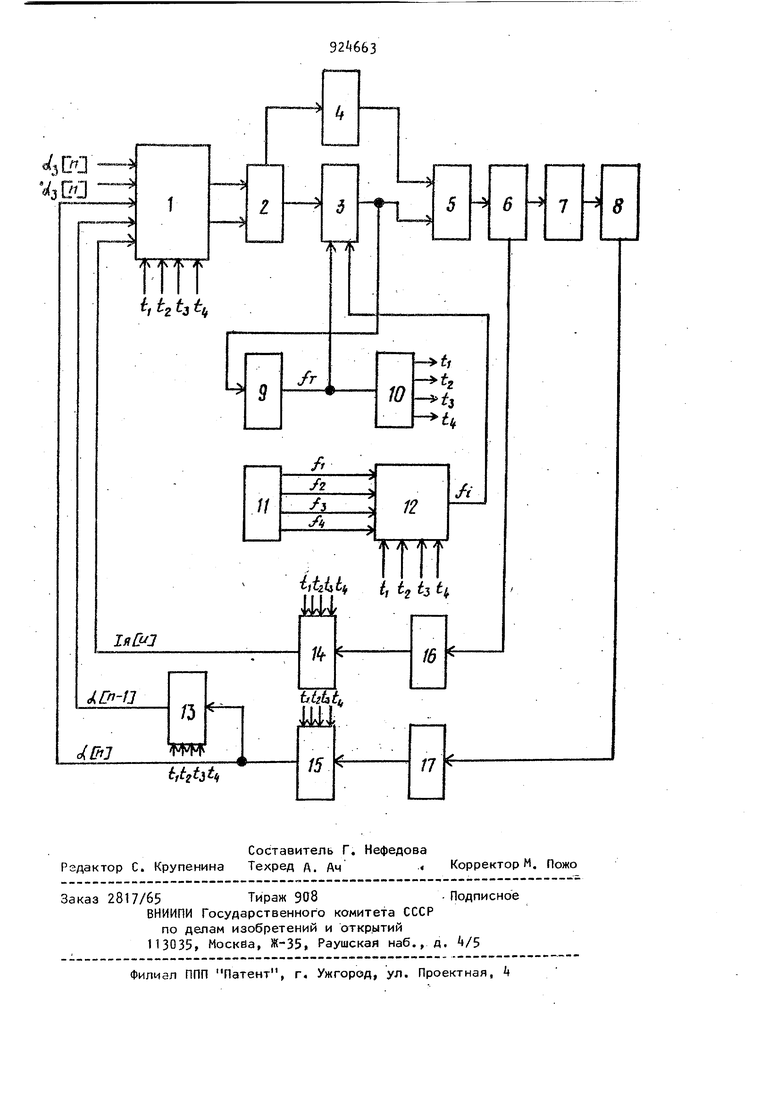
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения электромеханических исполнительных систем производственных механизмов, в частности манипупяционных роботов.
Известны цифровые следящие системы, в которых сигнал управления силовым преобразователем формируется с помощью специализированного вычислительного устройства ССВУ), построенного на цифровых и аналоговых микросхемах СП.
Основными недостатками указанных систем являются их сложность и высокая стоимость из-за большого числа микросхем, входящих в эти,системы.
Наиболее близкой к предлагаемой по технической сущности является цифровая следящая система, сод.ержащая последовательно соединенные широтноимпульсный преобразователь, двигатель, редуктор, исполнительный механизм, датчик обратной связи по положению, первый аналого-цифровой преобразовател1, блок регистров памяти, вычислитель разное ти кодов, второй аналого-цифровой преобразователь и датчик обратнойсвязи по току, вход которого соединен с вторым выходом двигателя, а выход - с входом второго аналого-цифрового преобразователя, v
СВУ этой системы, вк™ чакйчее а себя, в частности блок регистров памяти и вычислителя кодов, построено полностью на цифровых интегральных микросхемам (ЦИС) и представляет собой арифметико-логическое устройство, вычисляющее в каждом цикле работы, состоящем из 16 подынтервалов, цифровой сигнал, поступающий на-вход схемы управления, где он преобразуется в широтно-импульсный сигнал, управляющий преобразователем, с помощью которого регулируется напряжение, поступающее на электродвигатель следящей системы. Управляющий код поступаer or ЦВМ, a код отработки - от преобразователя фаза - код, соединенного с преобразователем угол - фаза, который связан с валом редуктора. СВУ включает в свой состав сумматор комбинационного типа, шесть регистро и блок управления, содержащий генератор импульсов, три линии задержки для выработки трех тактирующих импульсов в каждом из 16 подынтервалов, делитель частоты и ряд других логических схем, формирующих импульсные и потенциальные сигналы И. Алгоритм раб.оты СВУ представляет собой вычисление ошибки, хранение ошибки предыдущего цикла, умножение каждой из этих величин на определенный коэффициент и руммирование резул татов. Умножение величины на коэффициент реализуется путем многократного суммирования этой величины в одном и том же цикле о Основными недостатками известной системы являются сложность и высокая стоимость из-за большого количества ;ЦИС, входящих в СВУ, а также слож- , ность перенастройки параметров алгоритма управления, которые вызваны неиспользованием вычислительной функции двигателя системы, приводящего в движение исполнительный ме анизм, как интегрирующего элемента, а также неиспользованием всех возможностей широтно-импульсного способа регулиро вания напряжения, питающего электродвигатель., Цель изобретения - упрощение системы путем уменьшения числа ((ИС, т« уменьшение стоимости и увеличение на дежности системы без ухудшения динамических свойств, а также обеспечение возможности и простоты перенастройки параметров алгоритма управления в широких пределах. Поставленная цель достигается тем что система дополнительно содержит ждущий мультивибратор, распределител тактовых импульсов, формирователь ширины импульса, блок управления реверсом напряжения, блок мультивибрато-. ров высокой частоты и первый и второй коммутатор, при этом первый и второй входы первого коммутатора соединены с соответствующими входами системы, третий вход - с выходом первого аналого-цифрового преобразователя, четвертый вход - с выходом блока регистров памяти, пятый вход - с выходом второго аналого-цифрового преобразсвателя, первый и второй выходы с соответствующими входами вычислителя разности кодов, первый выход которого соединен с первым входом формирователя ширины импульса, второй вход которого соединен с выходом ждущих мультивибратора и с входом распределителя тактовых сигналов, третий вход - с выходом второго коммутатора, а выход - с входом ждущего мультивибратора и первым входом ш иротно-импульсного преобразователя, вход блока управления реверсом напряжения соединен с вторым выходом вычислителя разности кодов, а выход с вторым входом широтно-импульсного преобразователя, выходы блока мультивибраторов высокой частоты соединены с соответствующими входами второго коммутатора, выходы распределителя тактовых импульсов соединены с соответствующими управляющими входами первого коммутатора, второго коммутатора, первого и второго аналогоцифровых преобразователей и блока регистров памяти. На чертеже изображена блок-схема предлагаемой системы. Схема содержит первый коммутатор (цифровых сигналов) 1, вычислитель 2 разности кодов, формирователь 3 ширины импульса, блок управления реверсом напряжения, широтно-импульснЫй преобразователь 5, двигатель 6, редуктор 7, исполнительный механизм 8, ждущий мультивибратор 9, распределитель 10 тактовых сигналов , блок 11 мультивибраторов высокой частоты, второй коммутатор (имп-ульсных сигна лов) 12, блок 13 регистров памяти, аналого-цифровь1е преобразователи 1 и 15, датчик обратной 16 связи по току и датчик 17 обратной связи по положениюВ системе реализован следующий алгоритм управления: иСп S Ч;,() V К2( -оССп t Cvi-ll} - ,Л9 1 где U Cnl - сигнал управления,формируемый в п-м циклеj .jtn -сигналы задания положения и скорости соответственно, поступающие от ЦВМ в п-м цикле; X лЗисС л-О - сигнал обратной связи по положению измеренный в и (п-1)-м циклах; Jy С - сигнал обратной связи по току, измеренный в п-м цикле; J.2. -3, коэффициенты пропор циональности (параметры алгоритма управления) . Цикл работы системы состоит из -х тактоВо В первом такте каждого цикла напряжения, подаваемое на двигатель, пропорционально составлякяцей Ki o jLiAl -ccCv l), во втором - ,СиЗ , в трет ем - () и в четвертом K,a,J9-n3 . Система работает следующим образом В канале 1-го такта п-го цикла через коммутатор 1 цифровых сигналов, который управляется тактовыми сигналами tt, формируемыми распределителем 10 тактовых импульсов, к входам вычислителя 2 разности кодов поступает i-я пара цифровых сигналов, причем сигнал, которому соответствует знак Плюс в алгоритме управления поступает на первый вход блока 2, а сиг нал, которому соответствует знак минус - на второй вход блока 2. В i-н такте может подаваться один сигнал, если по одному из каналов блока 1 подается нуль. Код PL с выхода блока 2 поступает на цифровой вход формирователя 3 ширины импульса, одновременно начинается формирование импульса, уси ленного в широтно-импульсном преобразователе 5, а на вход .интегрирующего счетчика блока 3 начинают поступать импульсы заполняющей частоты t, которая соответствует параметру KL данного такта и которая подается через коммутатор 12 импульсных сигналов с выхода i-го мультивибратора блока 11 Ширина импульса напряжения в i-м .такте определяется моментом равенства кода Р и кода интегрирующего счетчика в блоке 3 а полярность определяет ся блоком t, на вход которого поступает сигнал знака Qi. в i-м такте с выхода блока 2„ Длительность паузы в конце i-ro такта определяется временем срабатывания ждущего мультивибратора 9, при включении которого начинается следующий (i + 1) такт, в котором работа устройств системы анаfлогична описанной. Блок 13 в данном случае представляет собой регистр памяти для хранения а.(п-1),. Сигналы задания cvjtol и поступают с регистров ЦВМ, а сигналы обратных связей и IgUnl - с регистров аналого-цифровых преобразователей и 15 Работой блоков 13-15 управляют тактовые сигналы t , снимаемые с выхода блока 10. Измерения цифровых величин Ы.СЛ1 и производятся в течение последней паузы (n-l)-ro цикла, т.ео непосредственно перед началом п-го цикла Аналогичным образом может быть построена ЦСС, реализующая более сложный алгоритм управления, в управление которого входят сигналы, характеризующие ускорение, т.е. a,Cnl-2c.Cn-:-i +.oct:n-l или сигналы других обратных связей. Усложнение алгоритма управления приводит к непринципиальным изменениям блоков 1 и 10-13 Таким образом, предлагаемая система по сравнению с известной обладает следующими преимуществами: используется циклическое широтно-импульсное управление напряжением электродвигателя, при котором формирование среднего напряжения производится в течение цикла, состоящего из нескольких тактов работы широтно-импульсного , . преобразователя, т.е. в самом электродвигателе осуществляется суммирование напряжений, пропорциональных отдельным составляющим алгоритма управления; ширина импульса напряжения, формируемого широтно-импульсным преобразователем, определяется не только величиной кода, поступившего на его цифровой вход в данном такте, но и номером этого такта внутри цикла, т.е. в каждом такте одновременно с формированием ширины импульса напряжения производится умножение сигнала данного такта на свой коэффициент; увеличение добротности системы по скорости при малых сигналах рассогласования и более полное использование электродвигателя по напряжению (по мощности) достигается нелинейным управлением широтно-импульсным преобразователем с переменной частотой следования импульсов (низкой при больших рассогласованиях и более высокой при малых), при котором ширина и полярность-импульса напряжения зависят. от величины и знака выходного кода в данном такте, а пауза постоянна и мала по сравнению с максимальной шириной импульса, длительность паузы ограничивается временем преобразовакия анало -цифра измерительной части системы и задается схемой времен™ ной задержки в конце каждого,такта; .гибкость перенастройки параметров алгоритма управления определяется те .|то изменение коэффициента, на кото|рый умножается выходной код в каждом такте, сводится к изменениючастоты импульсов, заполнякхцих интегрирующий счетчик в схеме управления шир.отноимпульсным преобразователем в данном такте. Формула изобретения Цифровая следящая система, содержащая последовательно соединенные ши ротно-импульсный преобразователь, двигатель, редуктор, исполнительный механизм, датчик обратной связи по положению, первый аналого-цифровой преобразователь, а также блок регист ров памяти, вычислитель разности кодов и датчик обратной связи по току, вход которого соединен с вторым выходом двигателя, а выход - с входом второго аналого-цифрового преобразователя, отличающаяся тем что, с целью упрощения системы, она содержит ждущий мультивибратор, распределитель тактовых импульсов, формирователь ширины импульса, блок управления реверсом напряжения, блок мультивибраторов высокой частоты и первый и второй коммутаторы, при это первый и второй входы первого коммутатора соединены с соответствующими входами системы, третий вход - с выходом первЬго аналого-цифрового преобразователя, четвертый вход - с выходом блока регистров памяти, пятый вход с выходом второго аналого-цифрового преобразователя, первый и второй выходы - с соответствующими входами вычислителя разности кодов., первый выход которого соединен с первым входом формирователя ширины импульса, второй вход которого соединен с выходом ждущего мультивибратора и с входом распределителя тактовых сиг;налов, третий вход - с выходом второго коммутатора, а выход - с входом ждущего мультивибратора, и первым входом широтно-импульсного преобразователя, вход блока управления реверсом напряжения соединен с вторым выходом вычислителя разности -кодов, а выход - с вторым входом широтноимпульсного преобразователя, выходы блока мультивибраторов высокой частоты соединены с соответствующими входами второго коммутатора, выходы распределителя тактовых импульсов соединены с соответствующими управляющими входами первого коммутатора, второго коммутатора, первого и второго аналого-цифровых преобразователей и блока регистров памяти о Источники информации, принятые во внимание при экспертизе 1о Авторское свидетельство СССР № 531129, кл. G 05 В 11/01, 1973. 2. Батоврин А. А. и дро Цифровые системы управления электроприводами. Л„, Энергия, 1977, с. (прототип) ,
