ОФ 09 00
Устройство относится к электротехнике, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, осуществляемой с помощью полупроводниковых приборов предназначено для использования преимущественно в электрических машинах работающих в качестве реверсивных момеитных двигателей систем управления объектов различного назначения со стабилизированной скоростью вращения.
Известен реверсивный вентильный электродвигатель, содержащий статор с обмоткой якоря, ротор с постоянными магнитами, синусно-косинусный датчик положения ротора и электронный коммутатор, выполненный в виде линейньсх усилителей постоянного тока по числу секций якоря, что обеспечивает высокую плавность вращения ротора дйигателя СОНедостатком такого электродвигателя является нестабильность скорости вращения при изменении момента нагрузки и коэффициентов передачи узлов за счет воздействия температуры и других возмушающих факторов.
Наиболее близким к изобретению является реверсивный вентильный электродвигатель, содержащий ротор, статор с обмоткой якоря, секции которой соединены с выходом однополупериодного полупроводникового коммутатора, выполненного в виде однополярных усилителей постоянного тока по числу секций якоря, измерители фазных ЭЛС секций, связанные через блок низких частот и блок изменения знака обратной связи с блоком сравнения, второй вход которого подключен к задатчику скорости, а выход к модулятору синусно-косинусного датчика положения ротора, выходы постоянного тока которого связаны с входами усилителей постоянного тока ЗНедостаток известного вентильного двигателя заключается в малом диапазоне регулирования скорости из-за неустойчивой работы при реверсе в области низких скоростей вращения.
Цель изобретения - расширение диапазона регулирования скорости.
Поставленная цель достигается тем, что в реверсивном вентильном электродвигателе, содержащем ротор, статор с обмоткой якоря, секции которой ; соединены с, выходом однополупериодного полупроводникового коммутатора, выполненного в виде однополярных усилителей постоянного тока по числу секций якоря, синусно-косинусный датчик положения ротора, снабженньй выходами постоянного тока по числу секций якоря, связанный с задатчиком скорости вращения, измерители фазных ЭДС секций и задатчик скорости вращения, полупроводниковый коммутатор дополнительно снабжен корректирующими, например, апериодическими звеньями и сумматорами по числу секций якоря, выходы которых подключены через корректирующие звенья к входам соответствующих усилителей постоянного тока, первый вход каждого сумматора соединен с выходом измерителя фазной ЭДС секции якоря, а второй вход подключен к соответствующему выходу постоянного тока синусно-косинусного датчика положения ротора.
Наличие указанных отличительных признаков обеспечивает введение отрицательной обратной связи по скорости вращения электродвигателя, знак которой строго соответствует направлению вращения ротора. Это позволяет отказаться от использования блока изменения знака обратной связи и связанных с ним элементов, вызывающих неустойчивую работу при малых скоростях вращения, и тем самым, получить положительный эффект в виде расширения диапазона регулирования при сравнительном упрощении устройства. При этом наличие в устройстве корректирующего звена предотвращает возможность возникновения паразитных колебаний по цепи обратной связи, что приводит к расширению диапазона регулирования ICKOрости.
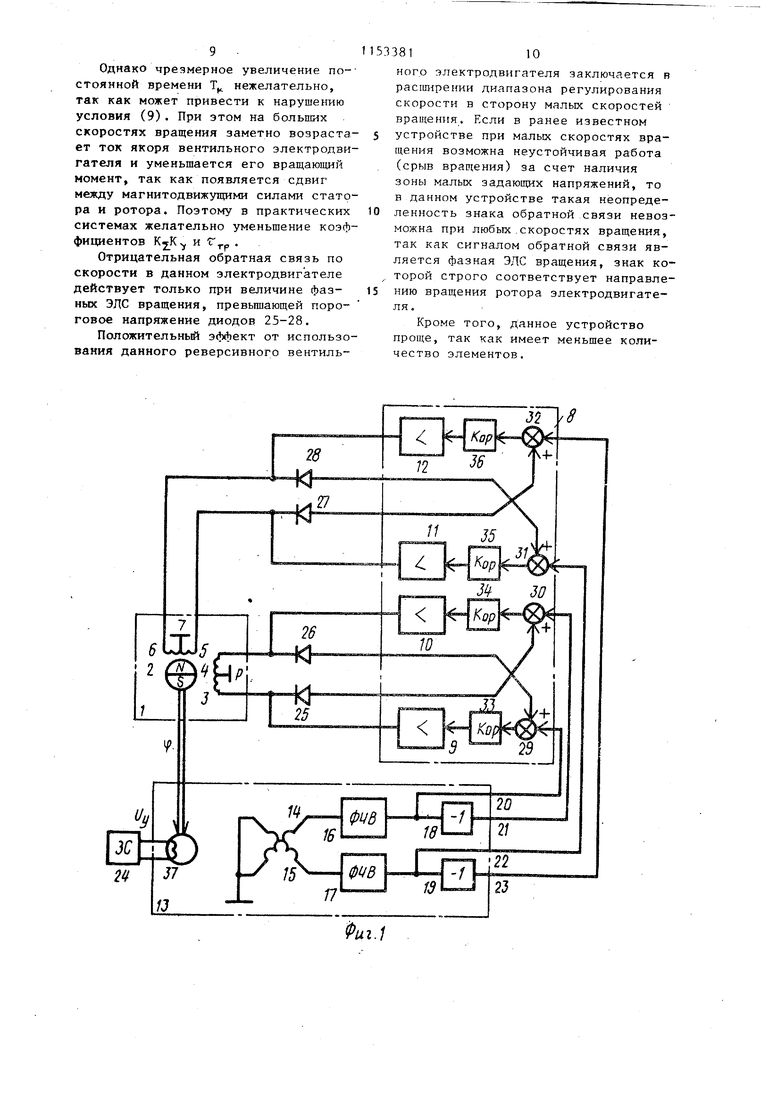
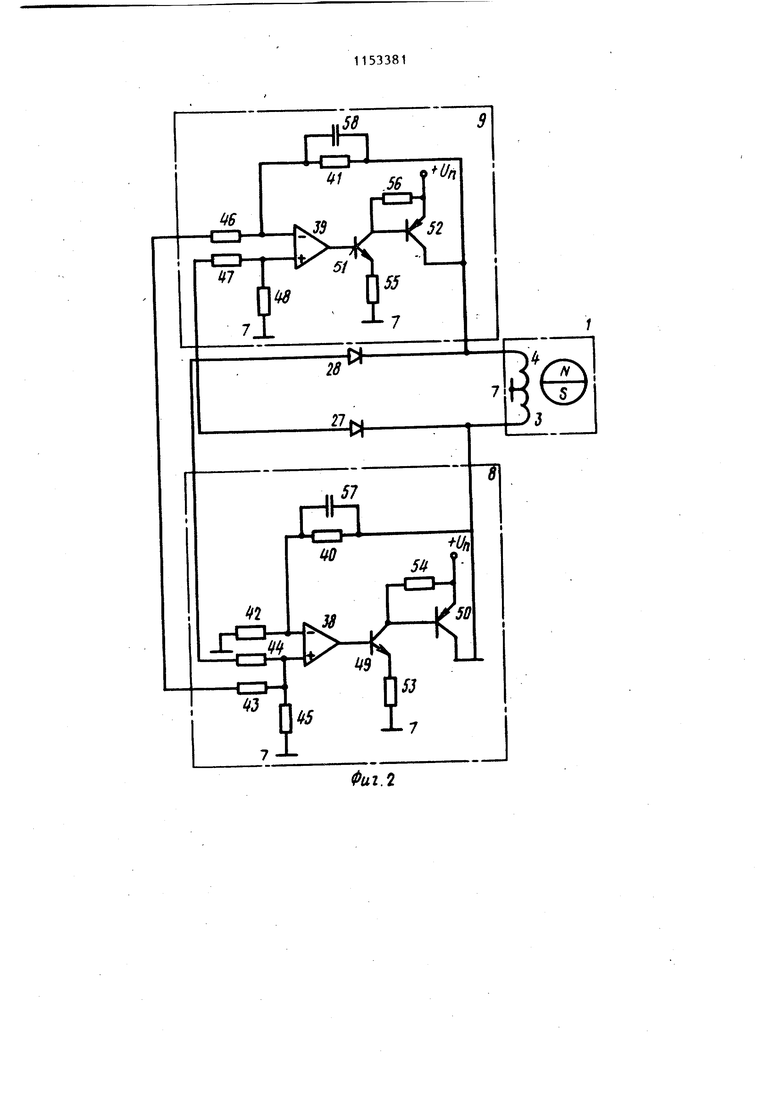
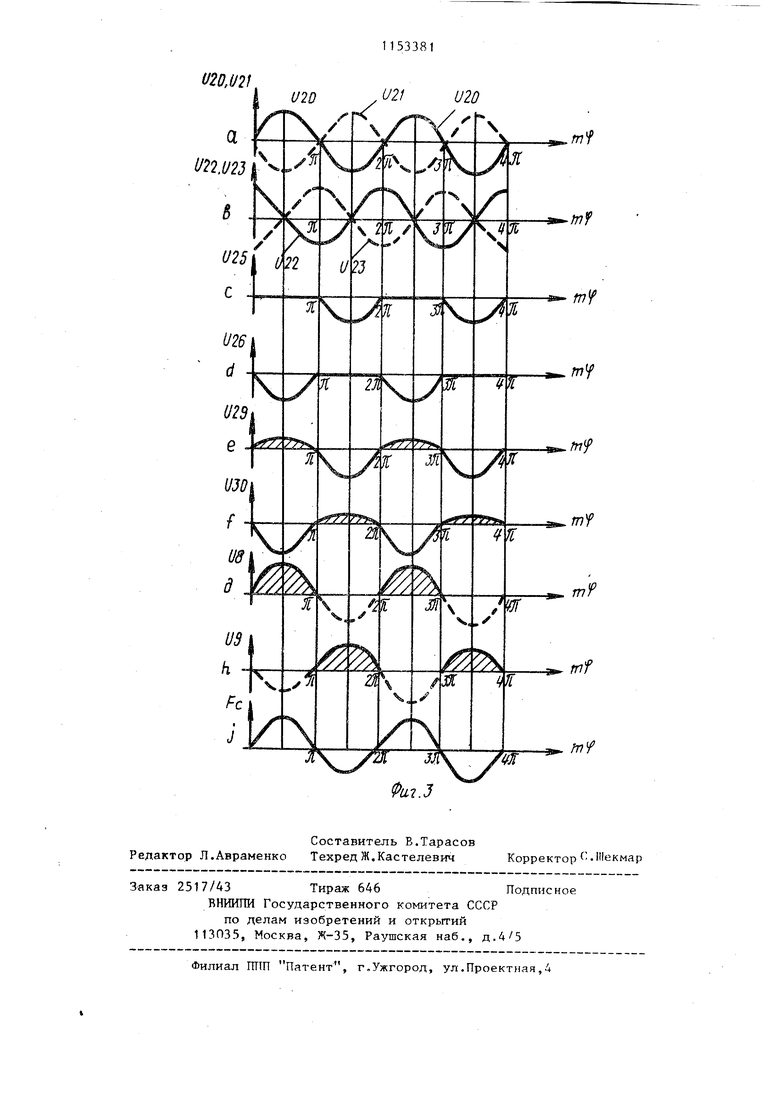
На фиг. 1 представлена функциональная схема реверсивного вентильного электродвигателя; на фиг. 2 часть принципиальной электрической схемы электродвигателя; на фиг. 3 диаграммы, поясняющие работу устройства.
Реверсивный вентильный электродвигатель выполнен на базе синхрон55 НОИ машины, которая содержит ротор
2 с постоянными магнитами и статор с обмоткой якоря, разделенной на секции 3-6. Один вывод каждой секции 3 соединен с общей шиной 7, а второй подключен к выходам однополупроводинко вого коммутатора 8, выполненного в виде однополярных усилителей 9-12 постоянного тока по числу секций якоря, С ротором 2 соединен синуснокосинусный датчик 13 положения ротора, вьтолненный, например, в виде вращающегося трансформатора, вторичные обмотки 14 и 15 которого соединены через фазочувствительные выпрямители 16 и 17 и инверторы 18 и 19 с прямыми 20 и 21 и инверсными 22 и 23 выходами датчика положения ротора 13. Электродвигатель также содержит задатчик 24 скорости и измерители фазных ЭДС в виде диодов 25-28, отрицательные электроды которых подключены к выводам секций 3-6 якоря. Направление включения диодов 25-28 (фиг. 1) соответствует случаю положительной полярности (относитель но общей пшны 7) напряжений на выходах однополярных усилителей 9-12. Дополнительно вентильный электродвигатель снабжен сумматорами 29-32 по числу секций якоря, выходы которых подключены соответственно к входам усилителей 9-12 постоянного тока через корректирующие звенья 3336. Первый вход каждого сумматора 29 32 соединен соответственно с выходом измерителя фазной ЭДС (положительным электродом диодов 25-28) инверсной секции якоря. Таким образом, первый вход сумматора 29, соединенного через корректирукицее звено 33 и усилитель 9 с секцией 3 обмотки якоря, подключен к диоду 26, соединенному с секцией 4, инверсной секции 3 обмотки якоря. Аналогично подключены первые входы и остальных сумматоров 30, 31 и 32. Второй вход каждого сумматора 29, 30, 31 и 32 соединен с соот ветствующим выходом 20, 21, 22 и 23 датчика 13 положения ротора, вход которого (в данном случае первичная обмотка 37 вращающегося трансформатора) подключен к задатчику скорости 24. Сумматоры 29, 30 и корректирукяцие звенья 33, 34 могут быть вьшолнены, например, на операционных усилителях 38 и 39 (фиг. 2), входящих в состав усилителей 9 и 10 постоянного тока, причем операционный усилитель 39 выполняет также роль инвертора 18. Операционные усилители 38 и 39 выпол нены по схеме суммирующих усилителей 814 с резисторами 40 и 41 в цепях обратной связи, при этом инвертируюп1ий вход операционного усилителя 38 подключен к общей шине 7 через резистор 42, а неинвертирующий вход соединен с выходом фазочувствительного выпрямителя 16 через резистор 43, с диодом 26 - через резистор 44, с общей шиной 7 - через резистор 45. Инвертирующий вход операционного усилителя 39 подключен к выходу фазочувствительного выпрямителя 16 через резистор- 46, а неинвертирующий вход соединен с диодом 25 через резистор 47 и с общей шиной 7 через резистор 48. Выходы операционных усилителей 38 и 39 подключены соответственно к выводам секций 3 и 4 обмотки якоря через транзисторы 49, 50 и 51, 52. Транзисторы 50 и 52 подключены к источнику питания положительной полярности() . Резисторы 53, 54 и 55, 56 служат для выбора рабочих режимов транзисторов 49, 50 и 51, 52. Корректирующие звенья 33 и 34 могут быть вьтолнены, например, в виде RС-цепи с резисторами 40 и 41 и конденсаторами 57 и 58 в цепях обратной связи операционных усилителей 38 и 39. В этом случае реализуется передаточная функция апериодического корректирующего звена. При необходимости в цепи обратной связи операционные усилителей могут быть включены другие элементы, реализующие передаточные функции более сложного вида. Обмотка якоря синхронной машины 1 может быть вьтолнена не только двухсекционной, но также и 6, 8 и т.д. секционной с выводом общей точки. днако при этом датчик 13 положения ротора должен иметь число выходов, равное числу секций. Например, при шестисекционной обмотке якоря в качестве датчика 13 положения ротора может быть применен сельсин, три вторичных обмотки которого соединены с шестью выходами датчика через три фазочувствительных выпрямителя и три инвертора. Реверсивный вентильный электродвигатель работает следующим образом. При подаче напряжения U. переменного тока от задатчика 24 скорости (фиг. 1) на вторичных обмотках 14 и 15 вращающегося трансформатора образуются напряжения переменного тока, огибагагще которых равны tJ,K U Sihm4 , 1J ° - iгде Ка - коэффициент трансформации Ч угол поворота ротора 2 электродвигателя 1; m - число пар полюсов электро двигателя и врап акяцегося трансформатора. Пройдя через фазочувствительные вьтрямители 16 и 17, а также инверторы 18 и 19,эти напряжения образуют на прямых 20, 21 и инверсных 22, 23 выходах датчика 13 г оложения ротора напряжения (фиг. 4о(, в) : и,- k 2й ф й-з 21 п-. k тЧ; , 23 -% jCosv,4, где ф коэффициент передачи фазочувствительного выпрямителя 16(17). Усилители 9, Ш, 11 и 12 постоян ного тока (фиг. 1) являются однополярными неинвертирующими усилителям поэтому на их выходах в рабочий полуперирд появляется напряжение поло жительной полярности при положитель ном напряжении на их выходах. При отрицательной полярности в нерабочи полупериод усилители 9-12 закрыты и напряжение на их выходах определя ется только ЭДС вращения синхронного электродвигателя 1, имеющей отрицательную полярность. Для нормальной работы электродви гателя необходимо, чтобы ЭДС вращения в секциях 3 и 4 обмотки якоря (фиг. 1) изменялась по закону синуса, а в секциях 5 и 6 - косинуса угла поворота ротора 2, что достигйется начальной выставкой датчика 13 положения ротора. В этом случае ЭДС вращения отрицательной полярнос ти, проходя через диоды 25 и 26, преобразуется в напряжения (фиг.3с, а): -, гг Kg uisi jr t u sinm4 . при -Kj ws titnV, при 0 гч1/ГТ
прм J ,
W.CplP
(9) 1 - угловая частота вращения ротора 2; - коэффициент пропор1ц ональности, зависящий ,от конструкции синхронного электродвигателя 1. На сумматорах 29 и 30 (фиг. 1) эти напряжения складываются с напряжениями Ujo и 1)22(2), образуя сигналы (фиг. 4e,f): и к fu-u , (С) 29 2i4K,K,k sinm. пр« , ь 2. О ф ри0.п,Ж SO ti« is/ . ,р„ J.wfiiT, где () коэффициент передачи сумматора. Так как для усилителей 9-12 рабоий полупериод соответствует положительной полярности входного напряжения, то на выходах усилителей 9 и 10 рабочие полупериоды формируются напряжения ,W|(p)cr 5itim/, ,,W(p)s/s;nmt/, при , де W|(p)- передаточная функция корректирукицего звена 33(34); KV, - коэффициент усиления усилителей 9(10). Эти напряжения показаны на фиг.З , ii сплошной линией, а штриховой ДС вращения синхронного электродвиателя 1, образующаяся на выводах 3 и 4 в нерабочие полупериоды. Так как секции 3 и 4 включены стречно, то их результирукщая магитодвижущая сила с учетом (8) рава (фиг. C CT V K P де параметр, определяемый конструкцией синхронного электродвигателя 1. Полагая в полосе рабочих частот ращения можно считать k c/siH mV. (10) /с ct V, . Аналогичным образом формируется результирующая магнитодвижущаяся сила секций 5 и 6 обмотки статора, управтяемьк косинусной вторичной обмоткой 15 вращающегося трансформатора ц Гсв5т 1 (11 Согласно принципу действия синхронного электродвигателя 1 магнито движущие силы (10) и (11) образуют в расточке статора круговое вращающееся магнитное поле, которое созда ет вращающий момент электродвигателя, приводящий ротор 2 во вращение со скоростью, пропорциональной ампл туду магнитодвижущих сил (10) и (11 A() , где .KO коэффициент, определяемьй конструктивными параметра ми электродвигателя 1, ЧА. Находя из последнего уравнения uj получим; 6t,A , Выбирая в полосе рабочих частот достаточно большой коэффициент усиления замкнутого контура так, чтобы было справедливо: , (н) найдем из (13) -R7 . («I , Таким, образом, устройство поддер живает скорость вращения двигателя пропорционально напряжению задатчик скорости при любых значениях его ам плитуды и знака (фазы). Корректирующие звенья 40 и 41 предназначены для подавления паразитных автоколебаний на выходах уси лителей 9 и 10, которые могут возникнуть из-за взаимоиндуктивности секций 3 и 4 обмотки якоря. Действи тельно, так как обратная связь с се ции 4на вход усилителя 9 является отрицательной, а секция 4 включена встречно с секцией 3, то взаимоиндуктивная связь между секциями приводит к положительной обратной связ с выхода усилителя 9 на его вход. Аналогичная связь существует и во всех других усилителях 10, 11 и 12. ередаточная функция разомкнутого контура положительной обратной связи меет вид r,oc(P)-4S%(P)Wjp), U4 де (p) - передаточная функция взаимоиндуктивной связи секций обмотки электродвигателя. Взаимоиндуктивная связь может ыть представлена дифференцирующим веном постоянного тока де - постоянная времени взаимоиндуктивной связи; Т - электромагнитная постоянная времени электродвига-. теля. С учетом (16), получим PW.CP) (p) а тр т ) Условием отсутствия автоколебаний при положительной обратной связи является неравенство pw(p) Cp) которое позволяет выбрать параметры корректирующего звена. В частности, для малых электромагнитных постоянных времени (что характерно, например, для моментных синхронных электродвигателей), полагая Т| - О и приняв корректирующее звено в виде апериодического звена Ч(Р1 получим из (19) (,)4l Пренебрегая единицей под корнем (т.е. усиливая неравенство), найдем требуемую постоянную времени корректирующего звена Однако чрезмерное увеличение постоянкой времени Т нежелательно, так как может привести к нарушению условия (9). При этом на больших скоростях вращения заметно возраста ет ток якоря вентильного электродви гателя и уменьшается его вращающий момент, так как появляется сдвиг между магнитодвижущими силами стато ра и ротора. Поэтому в практических системах желательно уменьшение коэф фициентов KjK-y и . Отрицательная обратная связь по скорости в данном электродвигателе действует только при величине фазных ЭДС вращения, превьппающей пороговое напряжение диодов 25-28. Положительный эффект от использо вания данного реверсивного вентильного электродвигателя заключается в рас1т1рении диапазона регулирования скорости в сторону малых скоростей вращения. Если в ранее известном устройстве при малых скоростях вращения возможна неустойчивая работа (срыв вращения) за счет наличия зоны мальгх задающих напряжений, то в данном устройстве такая неопределенность знака обратной связи невозможна при любых.скоростях вращения, так как сигналом обратной связи является фазная ЭДС вращения, знак которой строго соответствует направлению вращения ротора электродвигателя. Кроме того, данное устройство проще, так как имеет меньшее количество элементов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОЛВИГАТЕЛЬ, содержащий ротор, статор с обмоткой якоря, секции которой соединены с выходом однополупериодного полупроводникового коммутатора, вьшолненного в виде однополярных усилителей постоянного тока по числу секций якоря, синусно-косинусный датчик положения ротора, снабженный выходами постоянного тока по числу секций якоря, связанный с задатчиком скорости вращения, измерители фазных ЭДС секций и задатчик скорости вращения, отличающийся тем, что, с целью расширения диапазона регулирования скорости, полупроводниковый коммутатор дополнительно снабжен корректирующими, например, .апериодическими звеньями, и сумматорами по числу секций якоря, выходы которых подключены через корректирукяцие звенья к входам соответствующих усилителей постоянного тока, первый вход каждого сумматора соединен с выходом измерителя фазной ЭДС секции якоря, а второй вход подключен к соответствующему выходу постоянного тока синусно-косинусного датчика положения ротора.
U20,U21
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
