1 11
Изобретение относится к электрическим машинам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, осуществляемой с помощью полупроводниковых приборов. Оно предназначено для использования преимущественно в электрических машинах, работающих в качестве реверсивных исполнительных вигателей систем управления объектов различного назначения со стабилизированной скоростью вращения.
Известен также реверсивный венильный электродвигатель с нереверсивным тахогенератором постоянного тока и блоком изменения знака, управление которым осуществляется от логического блока определения направления вращения электродвигателя l1 .
Недостатком этого электродвигаеля является наличие дополнительного датчика положения ротора элекродвигателя, входящего в блок опрееления направления вращения.
Наиболее близким по назначению технической сущности является реерсивный вентильный электродвигатель, в котором определение направения вращения электродвигателя существляется по сигналам основного датчика положения ротора вентильного электродвигателя.
Известный вентильный электродвигатель содержит, последовательно соединенные задатчик скорости, элемент сравнения, предварительньй усилитель, синусно-косинусный датчик положения ротора (ДПР) с выходами на постоянном токе, полупроводниковьй коммутатор, двухфазную синхронную машину и датчик скорости в виде нереверсивного тахогенератора постоянного тока, вьтолненного, например, на базе синхронного генерат;ора и выпрямителя выход которого через блок изменения знака соединен с вторым входом элемента сравнения. Кроме того, электродвигатель содержит блрк определения направления вращения, состоящий из дешифратора, выход которого подключен к управляющему входу блока изменения знака, а входы подсоединены через два однополярных релейных элемента и к синусному и косинусному выходам ДПР соответственно, которые подключены также через коммутатор к двум со2329Z
ответствующим секциям и обмотки якоря синхронной машины, расположенной на статоре, а ротор синхронного двигателя кинематически свя5 зан с ДПР а .
Недостатком этого известного вентильного электродвигателя является низкая точность стабилизации скорости, вызываемая нестабш:1ьностью
10 работы блока определения направления вращения при изменении знака ошибки.
В известном вентильном.электродвигателе уменьшение напряжения
15 уставки может сопровождаться не уменьшением, а увеличением скорости поскольку при изменении зна- . ка рассогласования одновременно меняют знак напряжения на обоих вы20 ходных каналах датчика, что вызывает появление ложного сигнала на выходе блока определения направления вращения. Дпя обеспечения стабильной работы электродвигателя необходимо умень5 шение добротности (усиления) в замкнутом контуре регулирования скорое- . ти, что приводит к снижению точности стабилизации скорости.
Цель изобретения - увеличение
Q точности стабилизации скорости реверсивного электродвигателя путем повьнпения устойчивости замкнутого контура регулирования.
Поставленная цель достигается
5 тем, что в реверсивном вентильном электродвигателе, содержащем последовательно соединенные задатчик скорости, элемент сравнения, предварительный усилитель, синусно-косинусО ный датчик положения ротора, полупроводниковьй коммутатор, двухфазную синхронную машину и датчик скорости в виде нереверсивного тахогенератора постоянного тока, выход которого
через блок изменения знака соединен со входом элемента сравнения, а также блок определения напрз.вления вращения, содержаш Ий два рел:ейных элемента, входы которых связаны с
0 выходом положения ротора, выходы их соединены с соответствукицими входами дешифратора, выход которого, подключен к управлякщему входу блока изменения знака, дополнительно
5 снабжен блоком определения 1нака напряжения и двумя последовательно соединенными блоками умноже1шя и фильтрации нижних частот, в1|Коды
которых подключены ко входам соответствующих релейных, элементов, причем первые входы блоков умножения соединены с соответствующими выходами синусно-косинусного датчика положения ротора, а вторые входы объединены и соединены через блок определения знака напряжения со входом синусно-косинусного датчика положения ротора.
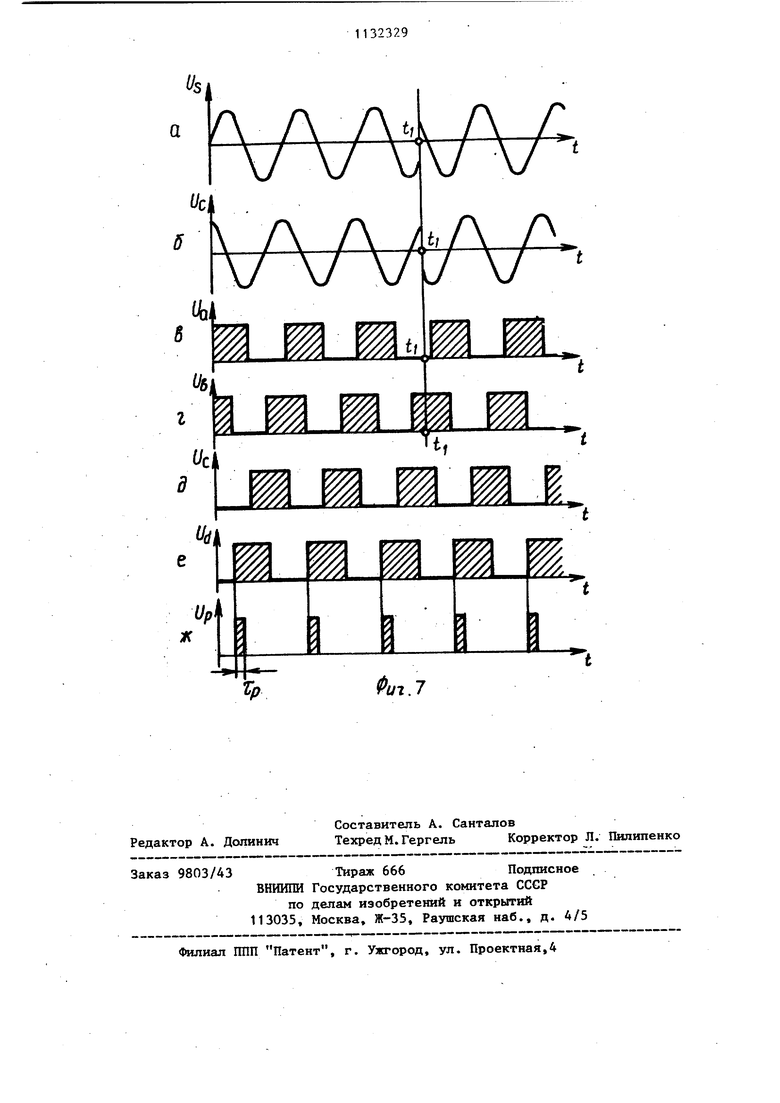
На фиг.1 представлена функциональная схема реверсивного вентильного электродвигателя на фиг.2, 3 и 4 - части принципиальной электрической схемы функциональных блоков, реверсивного вентильного электродвигатели; на фиг.5 и 6 принципиальная электрическая схема дешифратора, на фиг. 7 - временные диаграммы, поясняющие работу устройства.
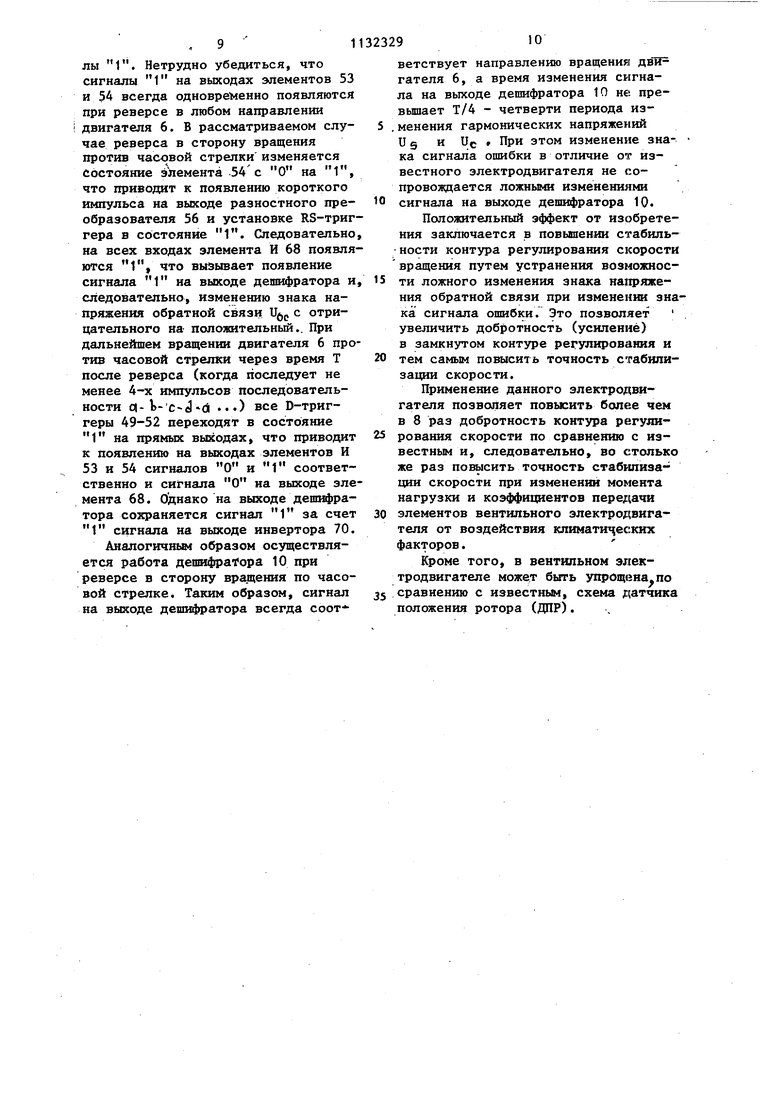
Рев.ерсивный вентильный электродвигатель содержит (фиг.1) последовательно соединенные задатчик 1 скорости, элемент 2 сравнения, предверительный усилитель 3, синусно-косинусный датчик 4 положения ротора (ДПР) с выходами на постоянном токе (выполненный, например, в виде двух датчиков Холла или синусно-косинусного вращающегося трансформатора с модулятором на входе) перед первичной обмоткой и двумя фазочувствительными выпрямителями, подключенными к его вторичным обмоткам, полупроводниковый коммутатор 5, двухфазную синхронную мапгану 6 и датчик 7 скорости в виде нереверсивного тахогенеpaTopia постоянного тока, выход которого через блок 8 изменения знака соединен со входом элемента 2 сравнения. Электродвигатель содержит, кроме того, блок 9 определения направления вращения, состоящий из дещифратора 10, выход которого подключен к управлякяцему входу блока 8 изменения знака, а входы подсоединен к выходам двух релейных элементов 11 и 12, ДПР 4 своими выходами 13 и 14 через усилитель 5 связан с фазами 15 и 16 синхронной машины б, на роторе 17 которой, содержащем постоянный магнит, расположен тахогенератор 7.
В отличие от известного электродвигателя блок 9 определения направления вращения дополнительно снабжен блоком 18 определения знака (фазы) входного напряжения U« .ЦПР 4
и двумя блоками 19 и 20 умножения, выходы которых соединены соответственно через фильтры 21 и 22 нижних частот со входами релейных элементов 11 и 12, причем первые входы блоков 19 и 20 умножения подключены к соответствующим выходам ДПР 4, а вторые входы объединены и соединены через блок 18 определения знака напряжения со входом ДПР 4.
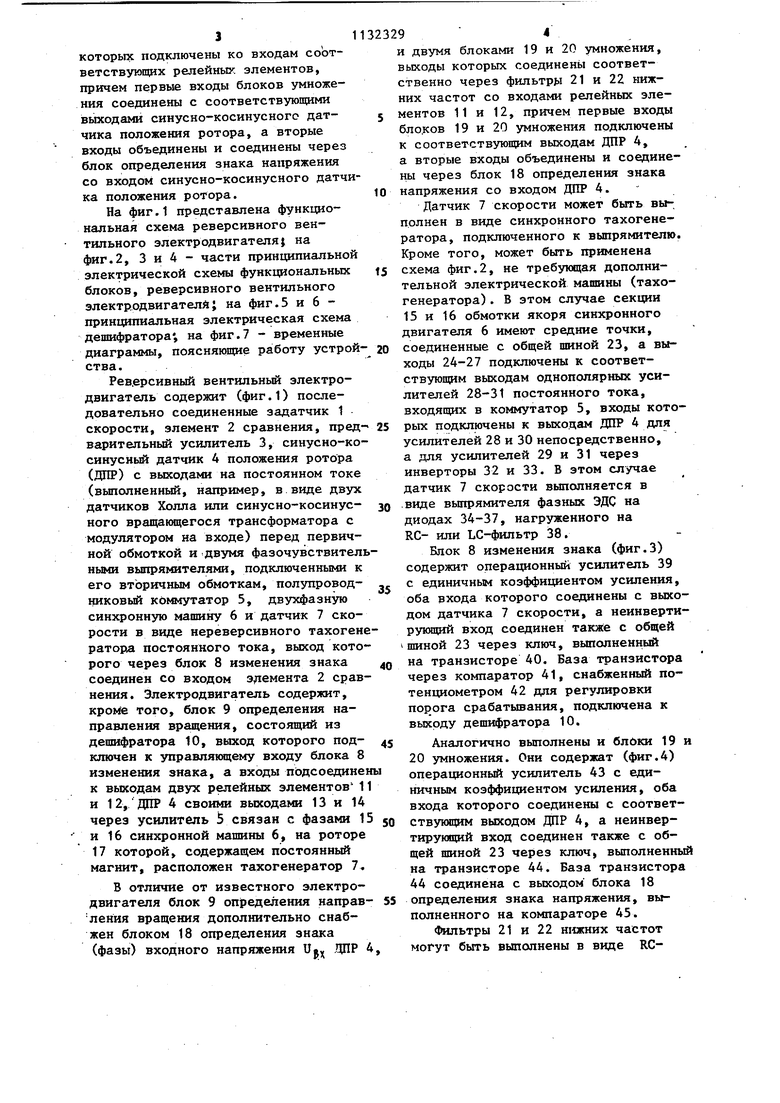
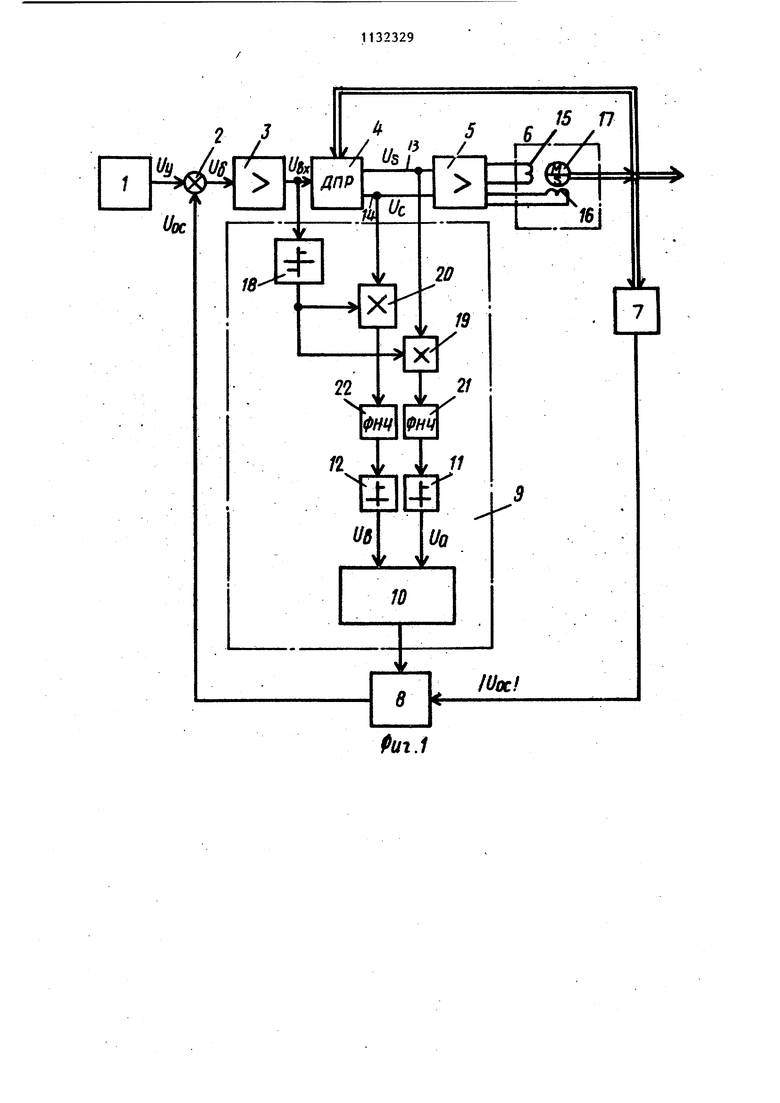
Датчик 7 скорости может быть выполнен в виде синхронного тахогенератора, подключенного к выпрямителю Кроме того, может быть применена схема фиг.2, не требующая дополнительной электрической машины (тахогенератора). В этом случае секции 15 и 16 обмотки якоря синхронного двигателя 6 имеют средние точки, соединенные с общей шиной 23, а выходы 24-27 подключены к соответствующим выходам однополярных усилителей 28-31 постоянного тока, входящих в коммутатор 5, входы которых: подключены к выходам ДПР 4 для усилителей 28 и 30 непосредственно, а для усилителей 29 и 31 через инверторы 32 и 33. В этом случае датчик 7 скорости выполняется в .виде выпрямителя фазных ЭДС на диодах 34-37, нагруженного на RC- или LC-фильтр 38.
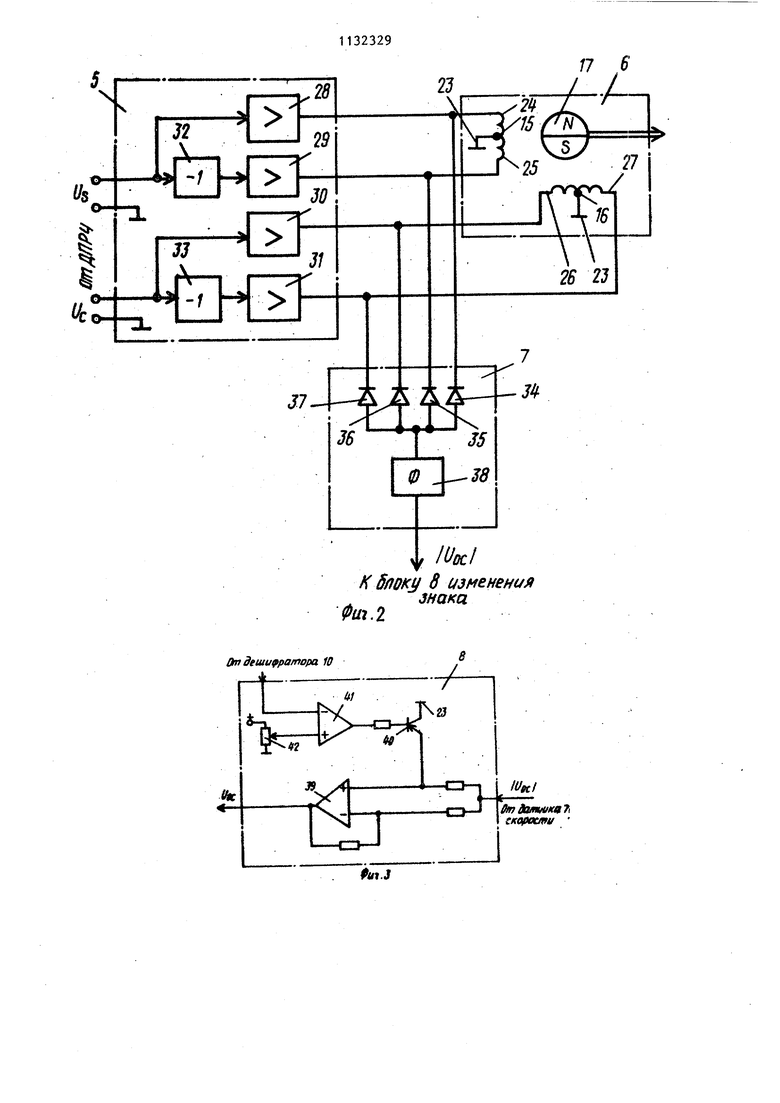
Блок 8 изменения знака (фиг.З) содержит операционный усилитель 39 с единичным коэффициентом усиления, оба входа которого соединены с выходом датчика 7 скорости, а неинвертирующий вход соединен такясе с общей ШИНОЙ 23 через ключ, выполненный на транзисторе 40. База транзистора через компаратор 41, снабженный потенциометром 42 для регулировки порога срабатывания, подключена к выходу дешифратора 10.
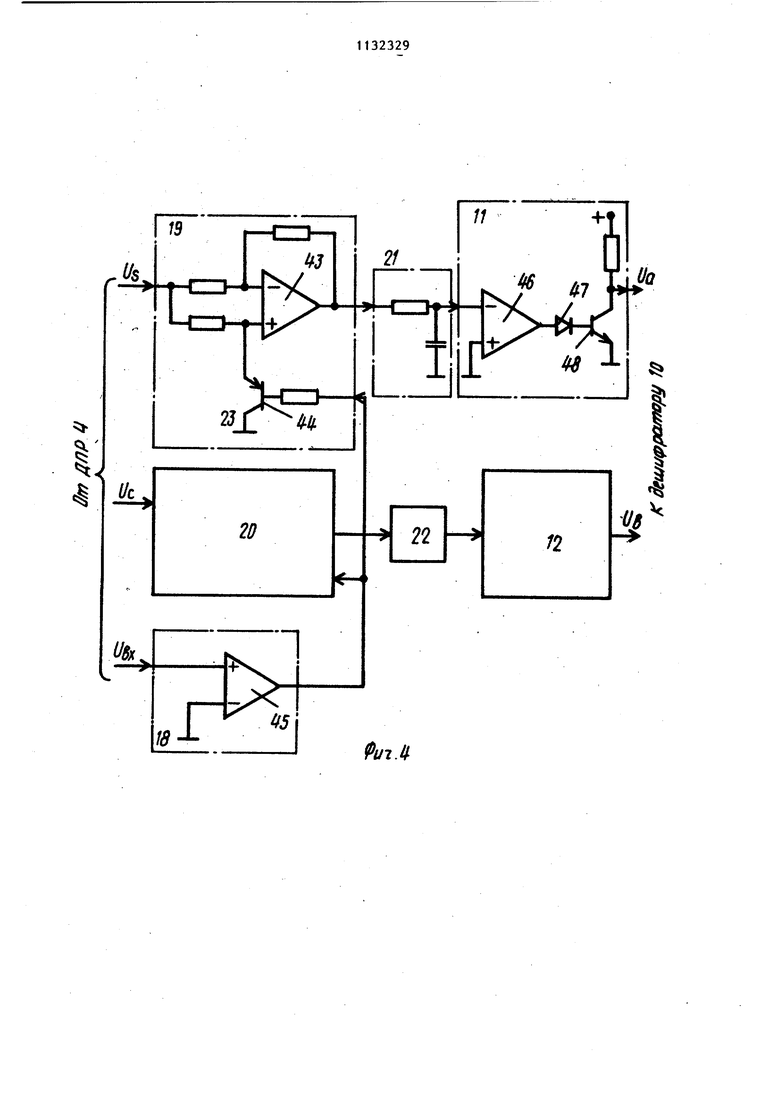
Аналогично выполнены и блики 19 20 умножения. Они содержат (фиг.4) операционный усилитель 43 с единичным коэффициентом усиления, оба входа которого соединены с соответствующим выходом дар 4, а неинвертирующий вход соединен также с общей шиной 23 через ключ, выполненны на транзисторе 44. База транзистора 44 соединена с выходом блока 18 определения знака напряжения, выполненного на компараторе 45.
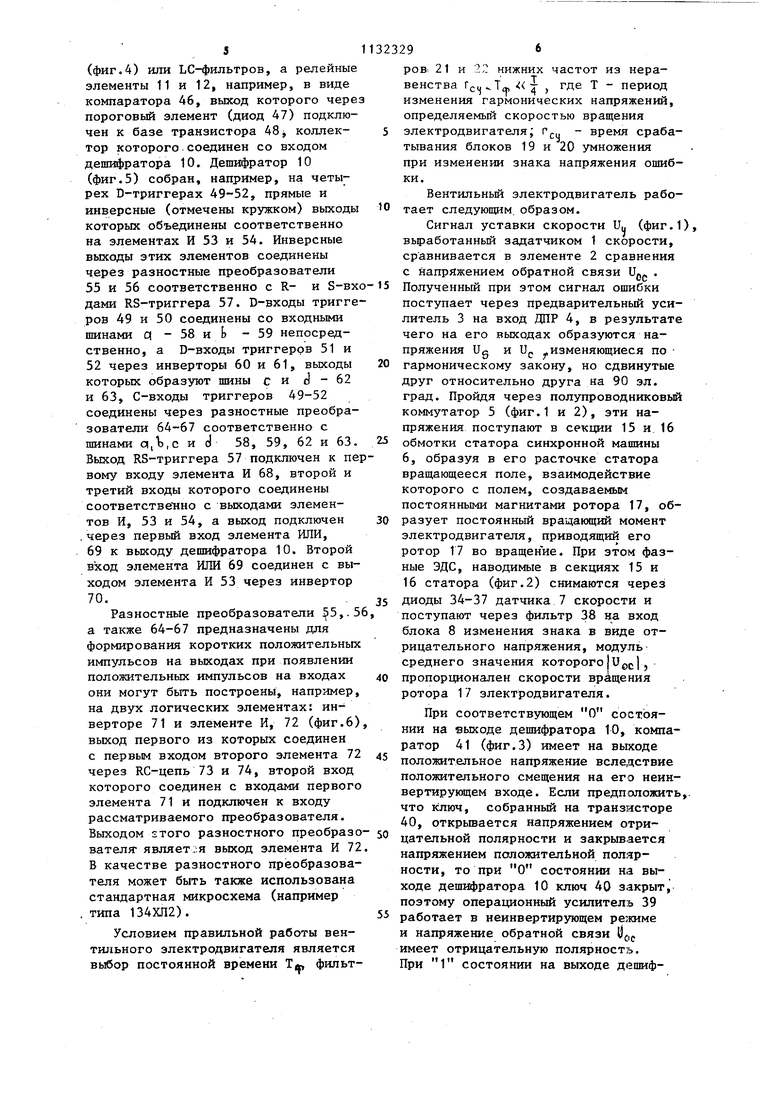
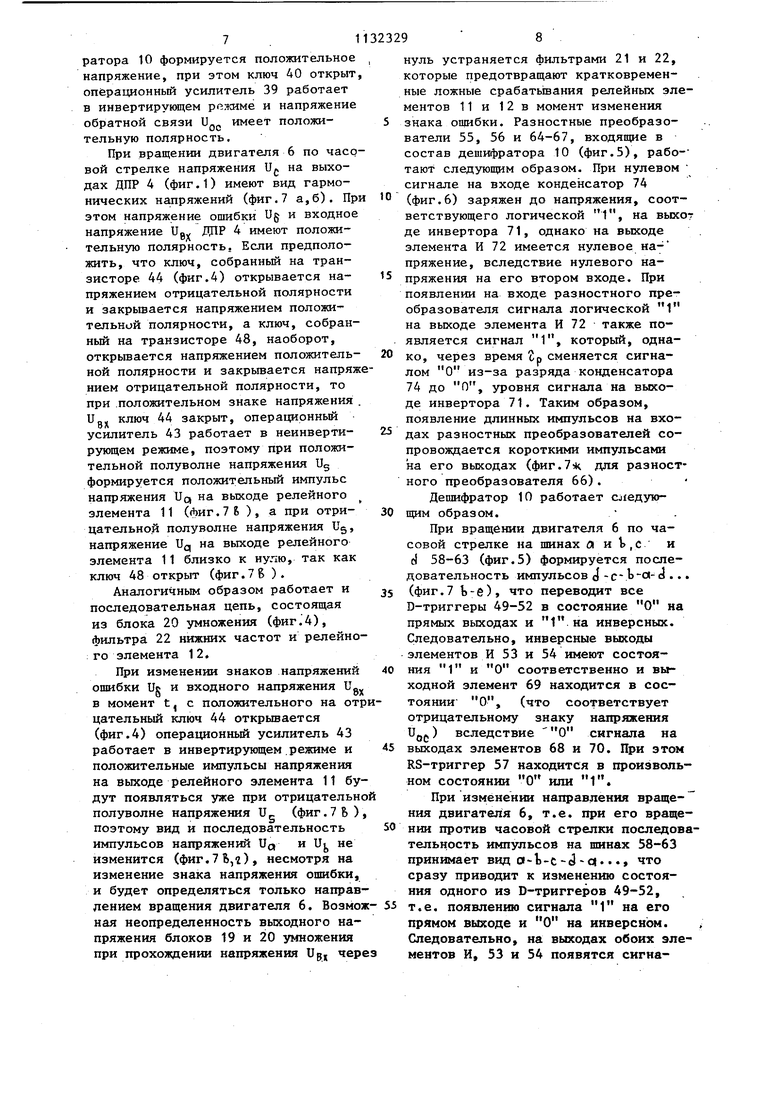
Фильтры 21 и 22 нижних частот могут быть выполнены в виде RC3(фиг.4) или LC-фильтров, а релейные элементы 11 и 12, например, в виде компаратора 46, выход которого чере пороговый элемент (диод 47) подключен к базе транзистора 48j коллектор которого соединен со входом депгафратора 10. Дешифратор 10 (фиг.5) собран, например, на четырех D-триггерах 49-52, прямые и инверсные (отмечены кружком) выходы которых объединены соответственно на элементах И 53 и 54. Инверсные выходы этих элементов соединены через разностные преобразователи 55 и 56 соответственно с R- и S-вх дами RS-триггера 57. В входы тригге ров 49 и 50 соединены со входными шинами q - 58 и Ь - 59 непосредственно, а D-входы триггеров 51 и 52 через инверторы 60 и 61, выходы которых образуют пшны си d - 62 и 63, С-входы триггеров 49-52 соединены через разностные преобразователи 64-67 соответственно с шинами о|,Ь,с и с) 58, 59, 62 и 63. Выход RS-триггера 57 подключен к пе вому входу элемента И 68, второй и третий входы которого соединены соответственно с выходами элементов И, 53 и 54, а выход подключен .через первьй вход элемента ИЛИ, 69 к выходу дешифратора 10. Второй вход элемента ИЛИ 69 соединен с выходом элемента И 53 через инвертор 70. Разностные преобразователи 5,.5 а также 64-67 предназначены для формирования коротких положительных импульсов на выходах при появлении положительных импульсов на входах они могут быть построены, например, на двух логических элементах: инверторе 71 и элементе И, 72 (фиг.6) выход первого из которых соединен с первым входом второго элемента 72 через RC-цепь 73 и 74, второй вход которого соединен с входами первого элемента 71 и подключен к входу рассматриваемого преобразователя. Выходом 2того разностного преобразо вателя- являет-:я выход элемента И 72 В качестве разностного преобразователя может быть также использована стандартная микросхема (например типа 134ХЛ2). Условием правильной работы вентильного электродвигателя является выбор постоянной времени Т| фильт29ров. 2 1 нижних частот из неравенства « , где Т - период изменения гармонических напряжений, определяемый скоростью вращения электродвигателя; - время срабатывания блоков 19 и 20 умножения при изменении знака напряжения ошибки. Вентильньм электродвигатель работает следующим, образом. Сигнал уставки скорости U,. (фиг.1), вьработанный задатчиком 1 скорости, сравнивается в элементе 2 сравнения с напряжением обратной связи Uj,.. . Полученный при этом сигнал ошибки поступает через предварительньш усилитель 3 на вход ДПР 4, в результате чего на его выходах образуются напряжения Ug и Up изменяющиеся по гармоническому закону, но сдвинутые друг относительно друга на 90 эл. град. Пройдя через полупроводниковый коммутатор 5 (фиг.1 и 2), эти напряжения поступают в секции 15 и. 16 обмотки статора синхронной маошны 6, образуя в его расточке статора вращающееся поле, взаимодействие которого с полем, создаваемым постоянными магнитами ротора 17, образует постоянный вращающий момент электродвигателя, приводящий его ротор 17 во вращение. При этом фазные ЭДС, наводимые в секциях 15 и 16 статора (фиг.2) снимаются через диоды 34-37 датчика 7 скорости и поступают через фильтр 38 на вход блока 8 изменения знака в виде отрицательного напряжения, модуль среднего значения которого lUgc,), пропорционален скорости вращения ротора 17 электродвигателя. При соответствующем О состоянии на выходе дешифратора 10, компаратор 41 (фиг.З) имеет на выходе положительное напряжение вследствие положительного смещения на его неинвертирукщем входе. Если предположить,, что ключ, собранный на транзисторе 40, открьшается напряжением отрицательной полярности и закрывается напряжением положительной полярности, то при О состоянии на выходе дешифратора 10 ключ 40 закрытj поэтому операционный усилитель 39 работает в неинвертирующем ре;киме и напряжение обратной связи Й, имеет отрицательную полярность. При 1 состоянии на выходе дешифратора 10 формируется положительное напряжение, при этом ключ 40 открыт операционный усилитель 39 работает в инвертирующем режиме и напряжение обратной связи Ug, имеет положительную полярность. При вращении двигателя 6 по часо вой стрелке напряжения U на выходах ДПР 4 (фиг.1) имеют вид гармонических напряжений (фиг.7 а,б). Пр этом напряжение ошибки Ug и входное напряжение Ug. ДПР 4 имеют положительную полярность. Если предположить, что ключ, собранный на транзисторе 44 (фиг.4) открывается напряжением отрицательной полярности и закрывается напряжением положительной полярности, а ключ, собранный на транзисторе 48, наоборот, открывается напряжением положительной полярности и закрьгоается напряж нием отрицательной полярности, то при .положительном знаке напряжения Ugn ключ 44 закрыт, операционный усилитель 43 работает в неинвертирующем режиме, поэтому при положительной полуволне напряжения Ug формируется положительный импульс напряжения UQ на выходе релейного элемента 11 (Лиг.76 ), а при отрицательной полуволне напряжения Не,, напряжение UQ, на выходе релейного элемента 11 близко к нулю, так как ключ 48 открыт (фиг.78). Аналогичным образом работает и последовательная цепь, состоящая из блока 20 умножения (фиг.4), фильтра 22 нижних частот и релейно го элемента 12, При изменении знаков напряжений ошибки Ut и входного напряжения Ug в момент t с положительного на от цательный ключ 44 открывается (фиг.4) операционный усилитель 43 работает в инвертирующем.режиме и положительные импульсы напряжения на выходе релейного элемента 11 бу дут появляться уже при отрицательн полуволне напряжения Ug (фиг.7&) поэтому вид и последовательность импульсов напряжений UQ и Uj не изменится (фиг.7Ь,г), несмотря на изменение знака напряжения ошибки, и будет определяться только направ лением вращения двигателя 6. Возмо мая неопределенность выходного напряжения блоков 19 и 20 умножения при прохождении напряжения U чер 9 8 нуль устраняется фильтрами 21 и 22, которые предотвращают кратковременные ложные срабать1вания релейных элементов 11 и 12 в момент изменения знака ощибки. Разностные преобразователи 55, 56 и 64-67, входящие в состав дешифратора 10 (фиг.5), работают следующим образом. При нулевом сигнале на входе конденсатор 74 (фиг.6) заряжен до напряжения, соответствующего логической 1, на выхот де инвертора 71, однако на выходе элемента И 72 имеется нулевое напряжение, вследствие нулевого напряжения на его втором входе. При появлении на входе разностного преобразователя сигнала логической 1 на выходе элемента И 72 также появляется сигнал 1, который, однако, через время ZD сменяется сигналом О из-за разряда конденсатора 74 до О, уровня сигнала на выходе инвертора 71. Таким образом, появление длинных импульсов на входах разностных преобразователей сопровождается короткими импульсами на его выходах (фиг.7;к для разностного преобразователя 66). Дешифратор 10 работает следующим образом. При вращении двигателя 6 по часовой стрелке на шинах а и 1,с и ci 58-63 (фиг.5) формируется последовательность импульсов d-с- Ь-а-J ... (фиг.7 Ь-е), что переводит все D-триггеры 49-52 в состояние О на прямых выходах и 1 на инверсных. Следовательно, инверсные выходы элементов И 53 и 54 имеют состояния 1 и О соответственно и выходной элемент 69 находится в состоянии О, (что соответствует отрицательному знаку напряжения UQJ,) вследствие сигнала на выходах элементов 68 и 70. При этом RS-триггер 57 находится в произвольном состоянии О или 1. При изменении направления враще- ния двигателя 6, т.е. при его вращении против часовой стрелки последовательность импульсов на шинах 58-63 принимает вид (3-q..., что сразу приводит к изменению состояния одного из D-триггеров 49-52, т.е. появлению сигнала 1 на его прямом выходе и О на инверсном. Следовательно, на выходах обоих элементов И, 53 и 54 появятся сигна.91 лы 1. Нетрудно убедиться, что сигналы 1 на выходах элементов 53 и 54 всегда одновременно появляются при реверсе в любом направлении двигателя 6. В рассматриваемом случае реверса в сторону вращения против часовой стрелки изменяется состояние эпеыента 54с О на 1, что приводит к появлению короткого импульса на выходе разностного преобразователя 56 и установке RS-триг гера в состояние 1. Следовательно на всех входах элемента И 68 появля ются 1, что вызывает появление сигнала 1 на выходе дешифратора и следовательно, изменению знака напряжения обратной связи U с отрицательного на положительный.. При дальнейшем вращении двигателя 6 про тив часовой стрелки через время Т после реверса (когда последует не менее 4-х импульсов последовательности й-1 -с-J dl ...) все D-триггеры 49-52 переходят в состояние 1 на прямых выходах, что приводит к появлению на выходах элементов И 53 и 54 сигналов О и 1 соответственно и сигнала О на выходе эле мента 68. Однако на выходе дешифратора сохраняется сигнал 1 за счет 1 сигнала на выходе инвертора 70. Аналогичньм образом осуществляется работа де1Ш1фра1ора 10 при реверсе в сторону вра.щения по часовой стрелке. Таким образом, сигнал на выходе дешифратора всегда соот 910 ветствует направлению вращения двН гателя 6, а время изменения сигнала на выходе дешифратора 10 не. превышает Т/4 - четверти периода изменения гармонических напряжений и g и Uc При этом изменение знака сигнала ошибки в отличие от известного электродвигателя не сопровождается ложными изменениями сигнала на выходе дешифратора 10. Положительный эффект от изобретения заключается в повьапении стабильности контура регулирования скорости вращения путем устранения возможности ложного изменения знака на11ряжения обратной связи при изменении знака сигнала ошибки. Это позволяет увеличить добротность (усиление) в замкнутом контуре регулирования и тем самым повысить точность стабилизации скорости. Применение данного электродвигателя позволяет повысить более чем в 8 раз добротность контура регулирования скорости по сравнению с известным и, следовательно, во столько же раз пота1сить точность стабилиза ции скорости при изменении момента нагрузки и коэффициентов элементов вентильного электродвигателя от воздействия климатш ес:ких факторов. Кроме того, в вентильном электродвигателе может быть упрощена.по сравнению с известным, схема датчика положения ротора (ДПР). ,
/7 е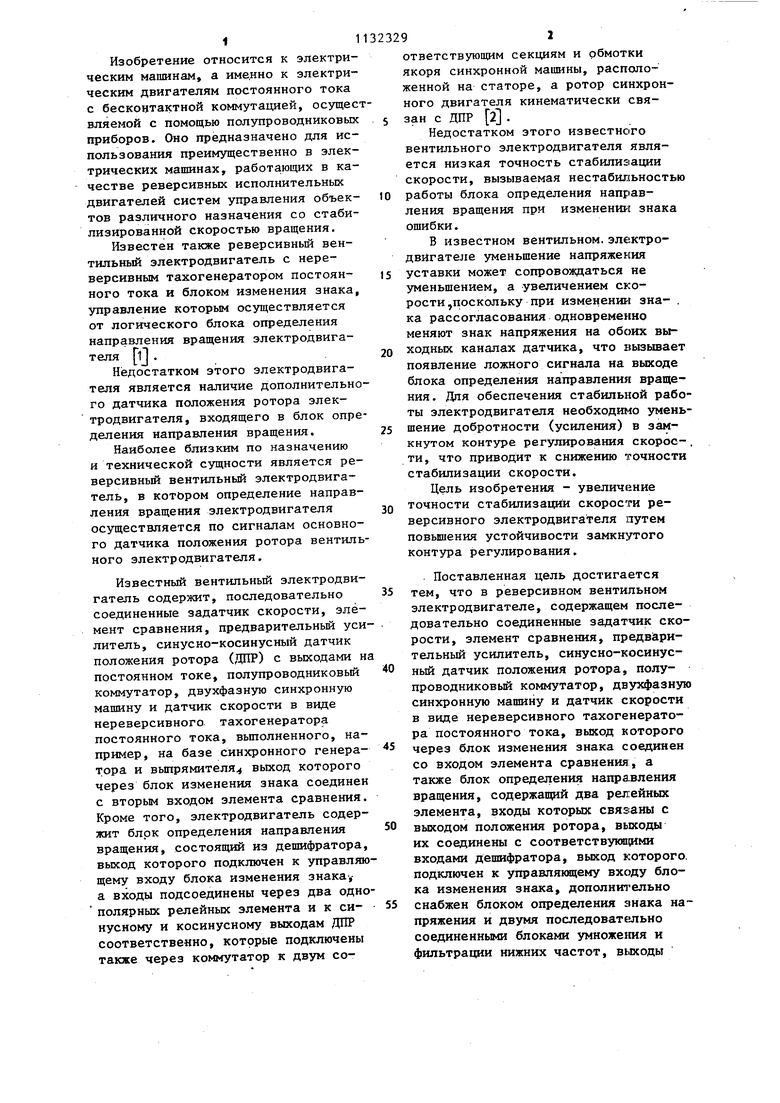
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1582292A1 |
| Реверсивный вентильный электропривод | 1985 |
|
SU1279040A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |

РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЖКТРОДВИГАТЕЛЬ, содержащий последовательно соединенные задатчик скорости, элемент сравнения, предварительный усилитель, синусно-косинусный датчик положения ротора, полупроводниковый коммутатор, двухфазную син- хронную машину и датчик скорости в виде нереверсивного тахогенератора постоянного TOKaj выход .которого через блок изменения знака соединен со входом элемента сравнения, а также блок определения направления вращения, содержащий два релейных элемента, входы которых связаны с выходом датчика положения ротора, а выходы соединены с соответствующими входами дешифратора, выход которого, в свою очередь, подключен к управлякяцему входу блока изменения знака, отличающийся тем, что, с целью увеличения точности стабилизации скорости, он дополнительно снабжен блоком определения знака напряжения и двумя последовательно соединенными блоками умножения и фильтрами нижних частот, выходы которых подключены ко входам соответствующих релейных элементов, причем (Л первые входы блоков умножения соединены с .соответствукщими выходами синусно-косинусного датчика положения ротора, а вторые входы объедине§ ны и соединены через блок определения знака напряжения со входом синусно-косинусного датчика положе- ния ротора. 00 о 9 О ;о
От дешифратора W
ftK
lUoc
К 5лок1 в иэмененс/я
знака 0UJ.2
/
/
а
/%/
э
ffnAue/tftfti екораеям/
«
г-т.
55(56MS7)
f.
Выход
VJ.
.J
Фиг.6
Ua
S
y
Od
V
PUT. л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU197313A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Михалев А.С | |||
| и Миловзоров В.П | |||
| Следящие системы с бесконтактными двигателями постоянного тока | |||
| М., Энергия, 1979, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
