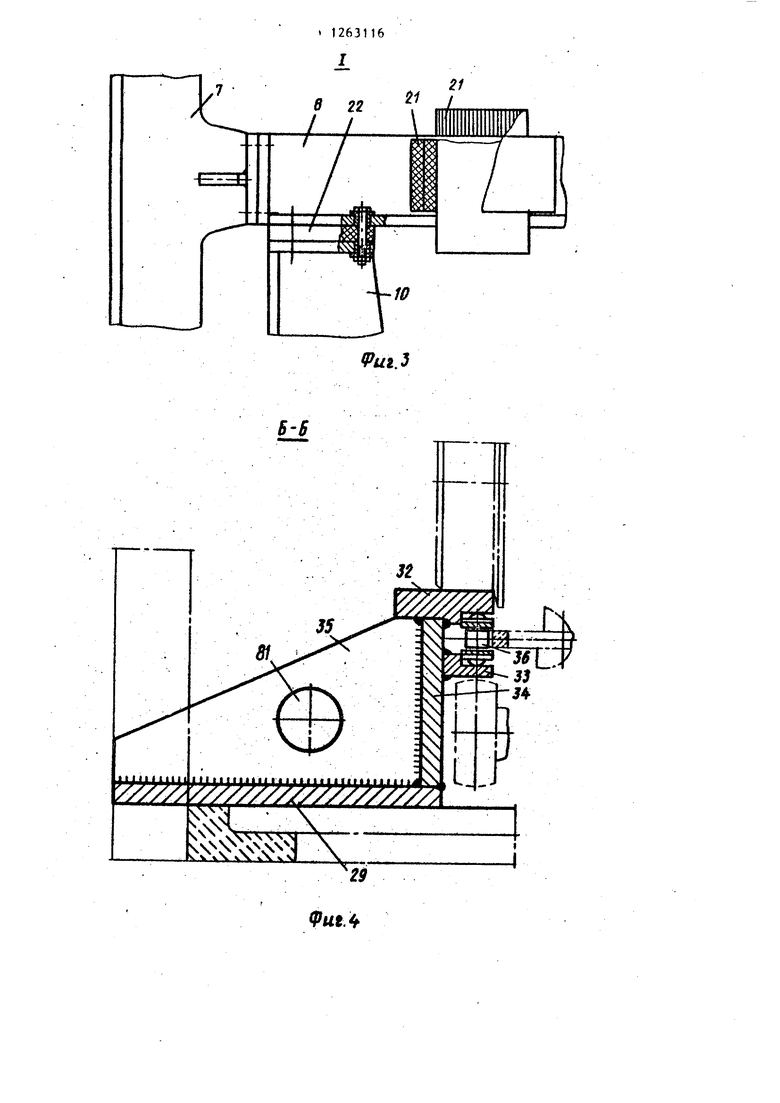
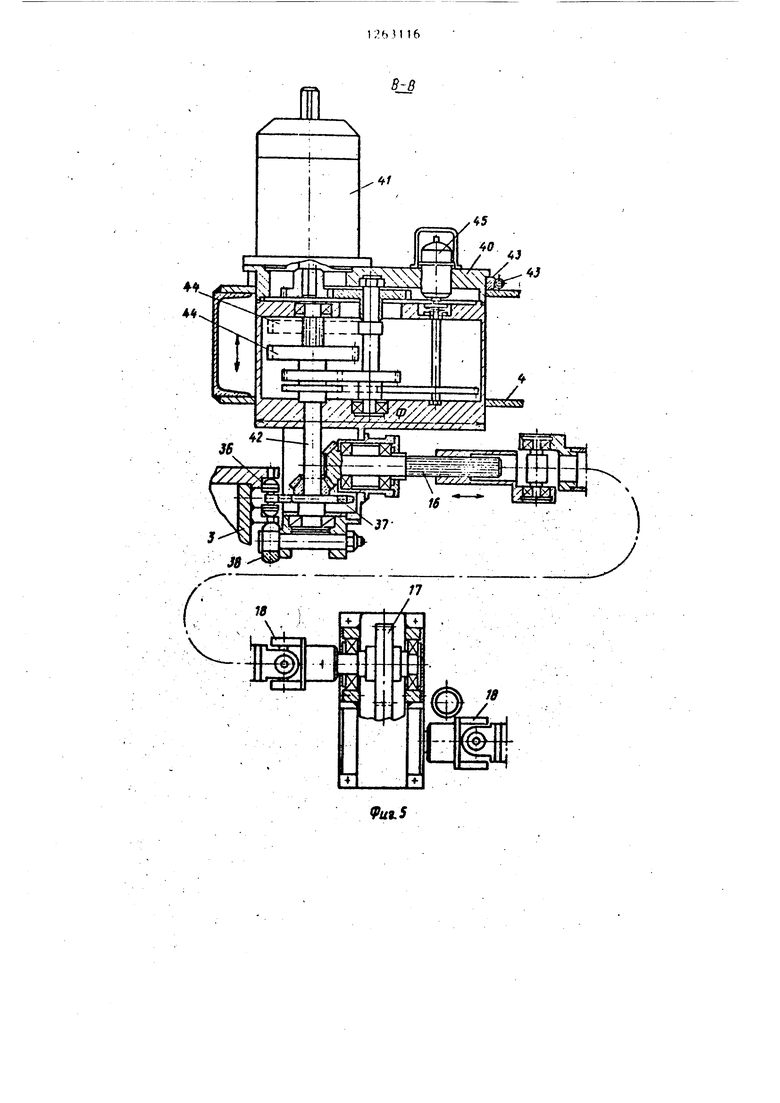
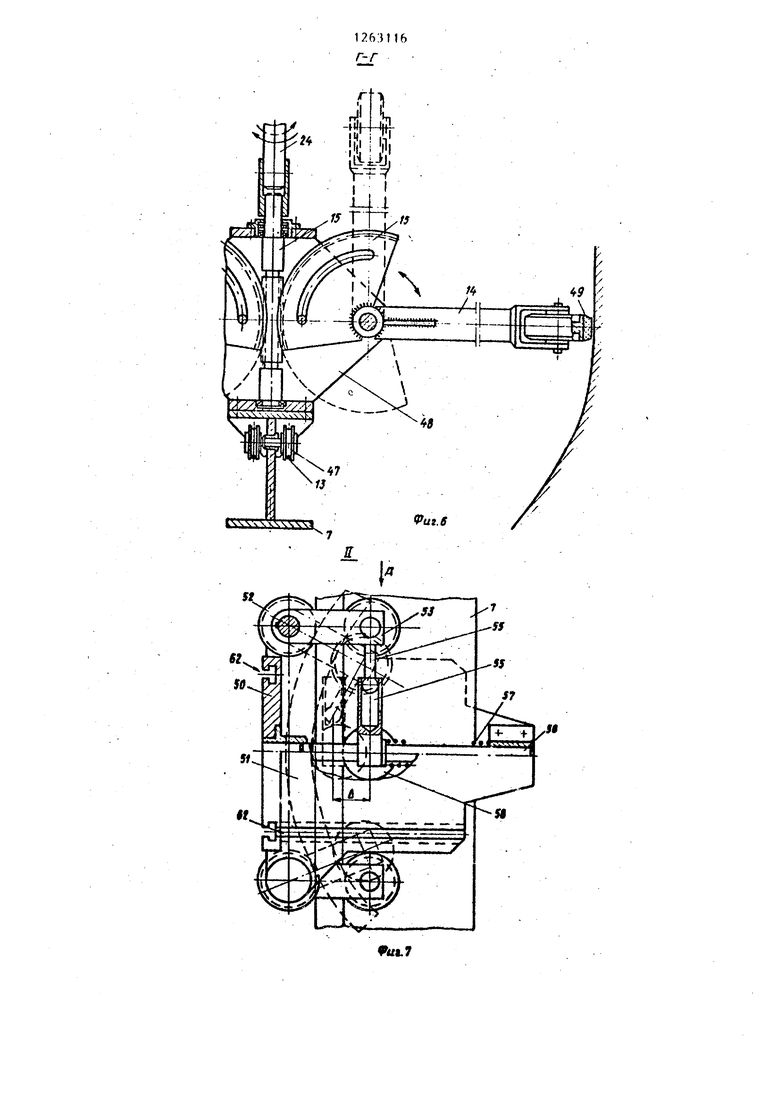
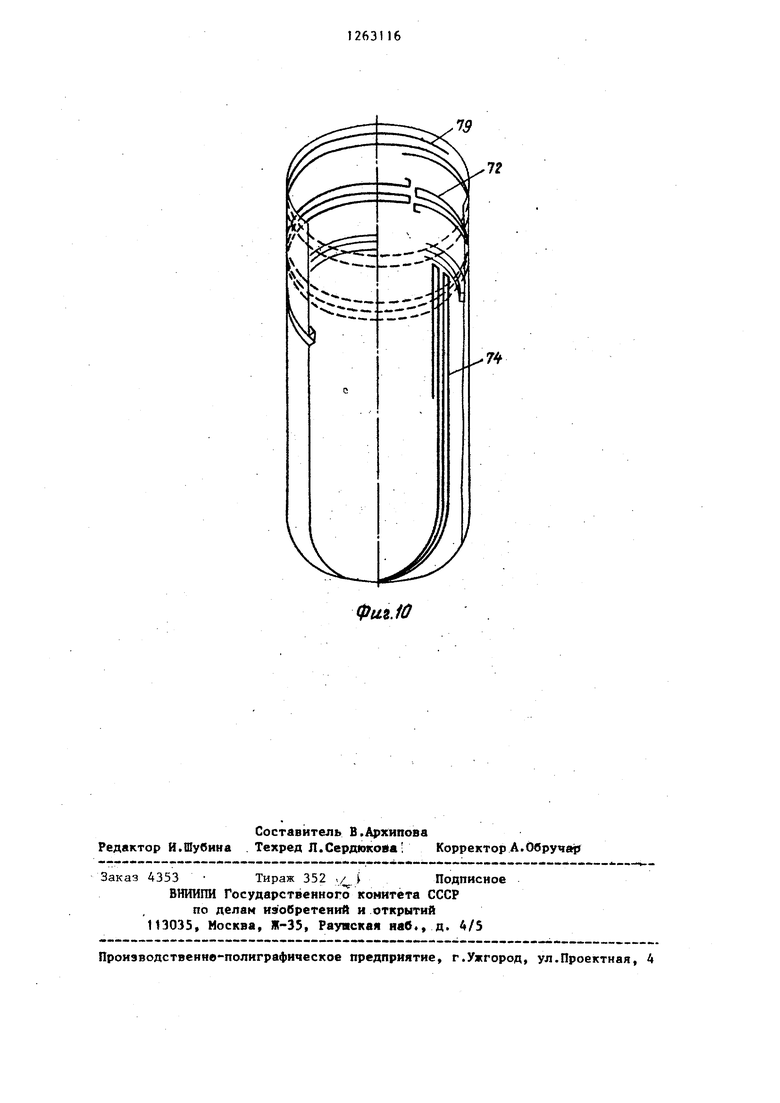
Изобретение относится к неразрушающему контролю и может быть использовано для периодического контроля состояния корпуса реактора. Цель изобретения - увеличение объема и качества контроля. На фиг. 1 представлен описываемый манипулятор, общий вид} на фиг. 2 то же, вид А на фиг. 1; на фиг. 3 вымосной элемент 1 на фиг. 1; на фиг. 4 - разрез Б-Б на фиг.2| на фиг. 5 - разрез В-В на фиг.2; иа фиг. 6 - разрез Г-Г на фиг.1; на фиг. 7 выносной элемент II ьа фиг. 1; на фиг. 8 - вид Д на фиг. 7; ка фиг. 9 - разрез Е-Е на фиг. 1; на фиг. to - возможные виды развертки поверхности траек эрий блоков измерительных преобразователей при контроле корпуса, Манигулятор для неразрушающего контроля корпуса реактора содержит пульт 1 управления, линии 2 связи, неподвижный опорный погон 3, поворот ный мост 4 на опорных катках 5, два привода 6 азимутального вращения, установленных на диаметрально противоположных сторонах поворотного моста 4 и кинематически сопряженных с неподвижным опорным погоном 3, направляющую 7, выполненную В форме и-образной рамы, замкнутую в верхней ее части цвумя перемычками 8 и 9 и жестко связанную с поворотным МЬстом 4 через опорные стойки 10 послед него, несущие каретки 11, подвижные вдоль направляющей 7 привод 12 пере мещения каретки, связанный с несущей кареткой 11 гибкой связью в виде нер жавеющего каната 13, дистанционирующие откидные распорки 14 с исполнительным механизмом 15, установленные в нижней части U-образной рамы 7 в среднем осевом сечении перпендикулярно ее плоскости, уравнивающую передачу, вьтолненную-в виде двух кони ческих пар 16 согласующей передачи 1 и двух карданных валов 18, предназна ченную для взаимной кинематической связи выходных валов приводов 6 азимутального вращения. Кроме того, манипулятор содержит накопитель 19 кабеля, например, поли спастного типа, состоящий из системы блоков 20. На верхней перемьгчке 8 и-образной paMbt расположен относящий ся к системе возбуждения злектромагнмтного дефектосг опа замкнутый маг1262 нитопровод 21 с обмоткой, охватывающей перемычку 8, изолированную от опорной стойки 10 поворотного моста 4 диэлектрической прокладкой 22 (фиг.З). Замкнутые магнитопроводы 23, относящиеся к блоку первичных преобразователей аппаратуры неразрушающего контpoj ;-, охватывают U-образную направляющую 7, и механически соединены с несугцими каретками 1 1 и перемещаются вместе с последними. Вращающийся вал 24 с жестко закрепленным на его верхнем конце штурвалом 25 ручного управления соединен в нижней части с выходным валом исполнительного механизма 15 дистанционирующих распорок 14. Защитный ориентирующий ложемент 26 с распределительной коробкой 27 предназначен для трассировки всех электрических линий, идущих от устройств, установленных на подвижных вращающихся частях манипулятора, и смонтирован на монтажной перемычке 9 с возможностью вращения относительно нее. . Для расширения тактико-технических возможностей манипулятора рекомендуется в едином конструктивном модуле предусматривать электрический вращающийся переход 28, на который могут поступать все электрические линии, позволяющие осуществлять непрерывное вращательное движение поворотного моста 4. Неподвижный опорный погон 3 может представлять собой в частном случае сварную металлоконструкцию, имеющую следующие детальные элементы: нижнюю центрирующую часть 29, соприкасающуюся с флан: ем корпус 30 контролируемого реактора и хотя бы тремя его Шпильками 31, верхнюю фасонную шайбу 32, предназначенную для установки поворотного моста 4 на катках 5, я промежуточное кольцо 33, соединенные между собой с помощью сварки цилиндрической oбevlйкoк 34 и равномерно расположенными по окружности ребрами жесткости 35. Между верхней шайбой 32 и промежуточным кольцом 33 жестко закреплена пластинчатая цепь 36, являкяцаяся одним из кинематических звеньев передачи в паре со эвеэдо жой 37 выходного вала привода азимутального вращения 6, Поворотный мост 4 представляет собой сварную металлоконструкцию, построенную, например, из швеллеров и листового
.12
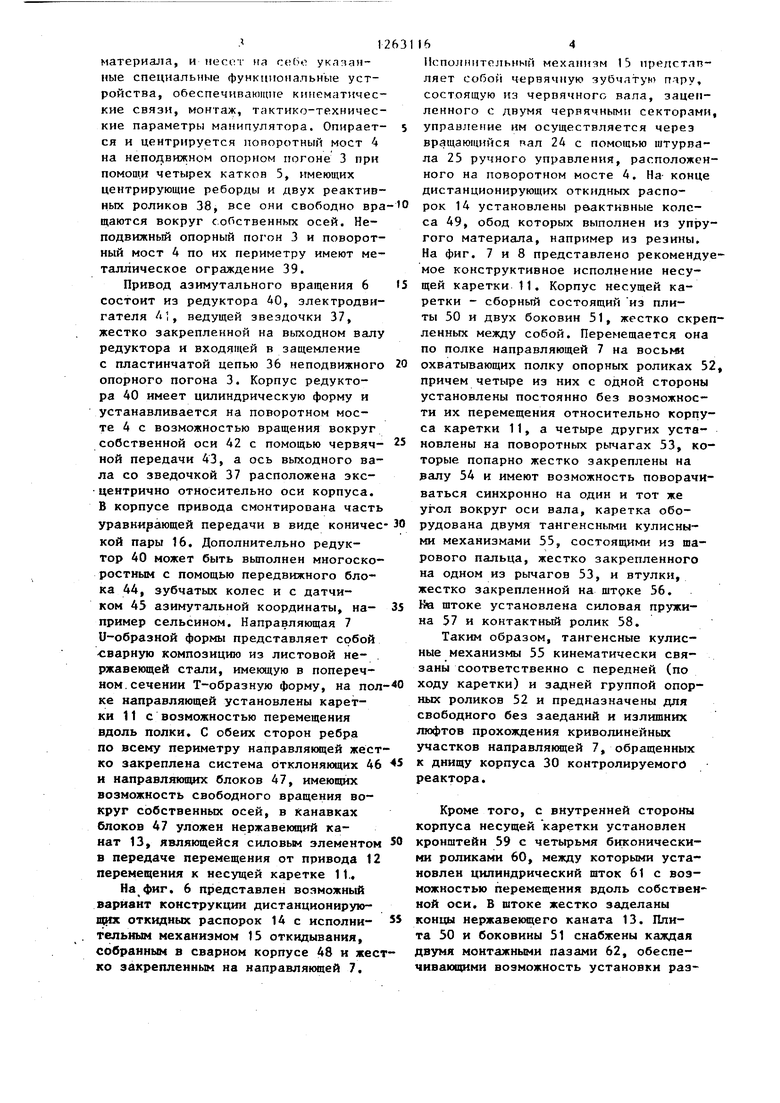
материала, и песет на cefx: укл; аиные специальные функциональные устройства, обеспечивающие кинематические связи, монтаж, тактико-технические параметры манипулятора. Опирается и центрируется попоротный мост А на неподвижном опорном погоне 3 при помощи четырех катков 5, имеющих центрирующие реборды и двух реактивных роликов 38, все они свободно вра щаются вокруг собственных осей. Неподвижньш опорный погон 3 и поворотный мост А по их периметру имеют металлическое ограждение 39.
Привод азимутального вращения 6 состоит из редуктора АО, электродвигателя AI, ведущей звездочки 37, жестко закрепленной на выходном валу редуктора и входящей в защемление с пластинчатой цепью 36 неподвижного опорного погона 3. Корпус редуктора 40 имеет цилиндрическую форму и устанавливается на поворотном мосте 4 с возможностью вращения вокруг собственной оси 42 с помощью червячной передачи 43, а ось выходного вала со зведочкой 37 расположена эксцентрично относительно оси корпуса. В корпусе привода смонтирована часть уравнирающей передачи в виде коничес кой пары 16. Дополнительно редуктор 40 может быть выполнен многоско- ростным с помощью передвижного блока 44, зубчатых колес и с датчиком 45 азимутальной координаты, например сельсином. Направляющая 7 и-образной формы представляет собой сварную композицию из листовой нержавеющей стали, имекхдую в поперечном, сечении Т-образную форму, на пол ке направляющей установлены каретки 11 с возможностью перемещения вдоль полки. С обеих сторон ребра по всему периметру направляющей жёстко закреплена система отклоняющих 46 и направляюпщх блоков 47, имеющих возможность свободного вращения вокруг собственных осей, в канавках блоков 47 уложен нержавекиций канат 13, являющейся силовым элементом в передаче перемещения от привода 12 перемещения к несущей каретке 11..
. 6 представлен возможный вариант конструкции дистанционирующих откидных распорок 14 с исполнительным механизмом 15 откидывания, собранным в сварном корпусе 48 и жеско закрепленньм на направляющей 7.
164
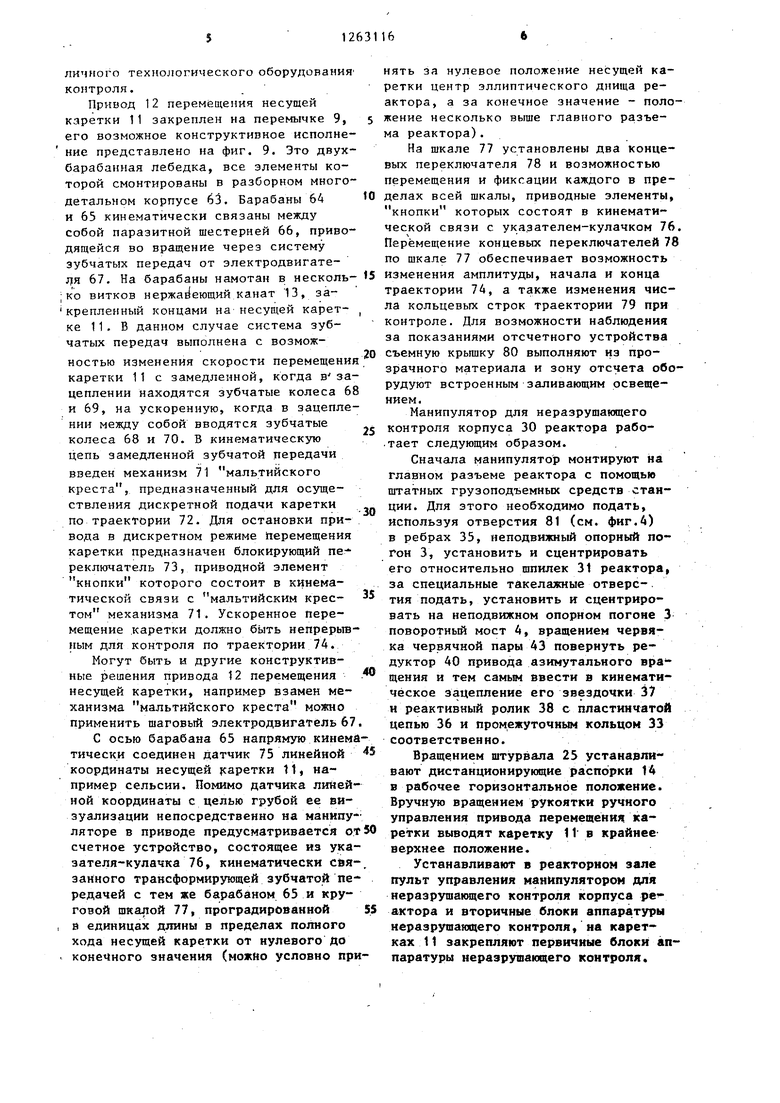
Исполнительный механизм 15 препстлвляет co6ofi червячную зубчлтуи п-тру, состоящую из червячного вала, зацепленного с двумя черрячными секторами управлер1ие им осуществляется через вращающийся пал 24 с помощью штурвала 25 ручного управления, расположенного на поворотном мосте 4. На конце дистанционирующих откидных распорок 14 установлены реактивные колеса 49, обод которых выполнен из упругого материала, например из резины. На фиг. 7 и 8 представлено рекомендумое конструктивное исполнение несущей каретки 11. Корпус несущей каретки - сборный состоящий из плиты 50 и двух боковин 51, жестко скреленных между собой. Перемещается она по полке направляющей 7 на восьми охватывающих полку опорных роликах 5 причем четьфе из них с одной стороны установлены постоянно без возможности их перемещения относительно корпуса каретки 11, а четыре других установлены на поворотных рычагах 53, которые попарно жестко закреплены на валу 54 и имеют возможность поворачиваться синхронно на один и тот же угол вокруг оси вала, каретка оборудована двумя тангенсными кулисными механизмами 55, состоящими из шарового пальца, жестко закрепленного на одном из рычагов 53, и втулки, жестко закрепленной на щтоке 56. Ка штоке установлена силовая пружина 57 и контактный ролик 58.
Таким образом, тангенсные кулисные механизмы 55 кинематически связаны соответственно с передней (по ходу каретки) и задней группой опорных роликов 52 и предназначены для свободного без заеданий и излишних люфтов прохождения криволинейных участков направляющей 7, обращенных к днищу корпуса 30 контролируемого реактора.
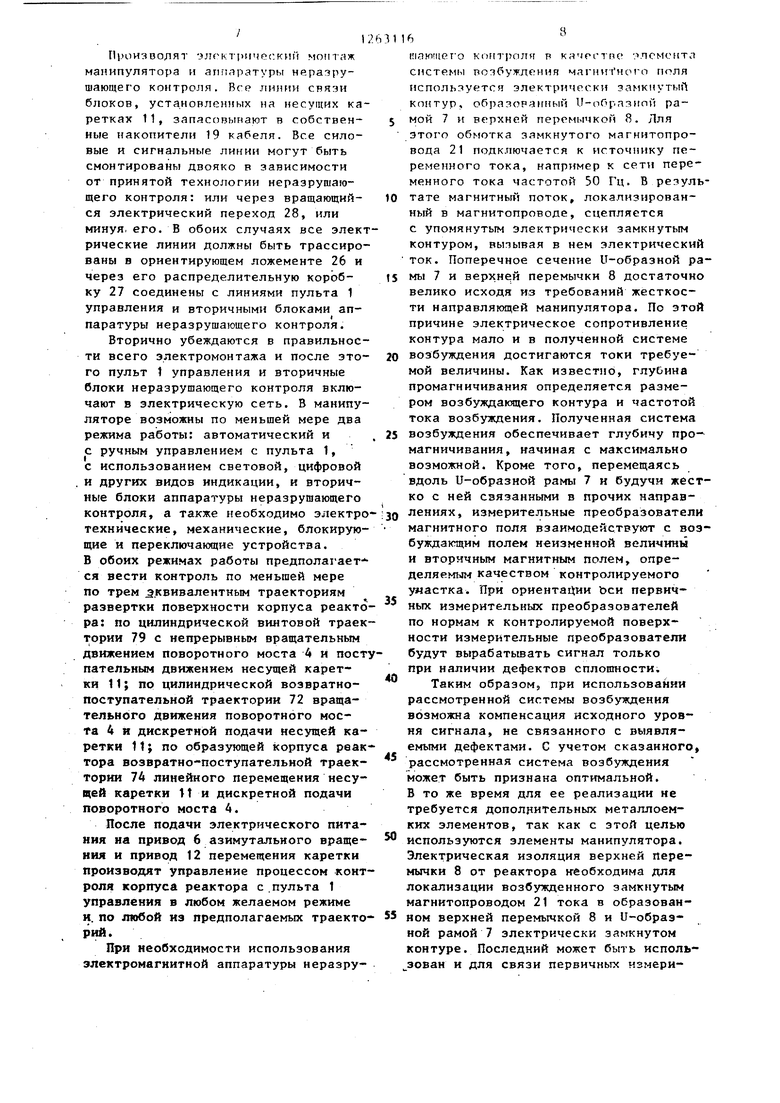
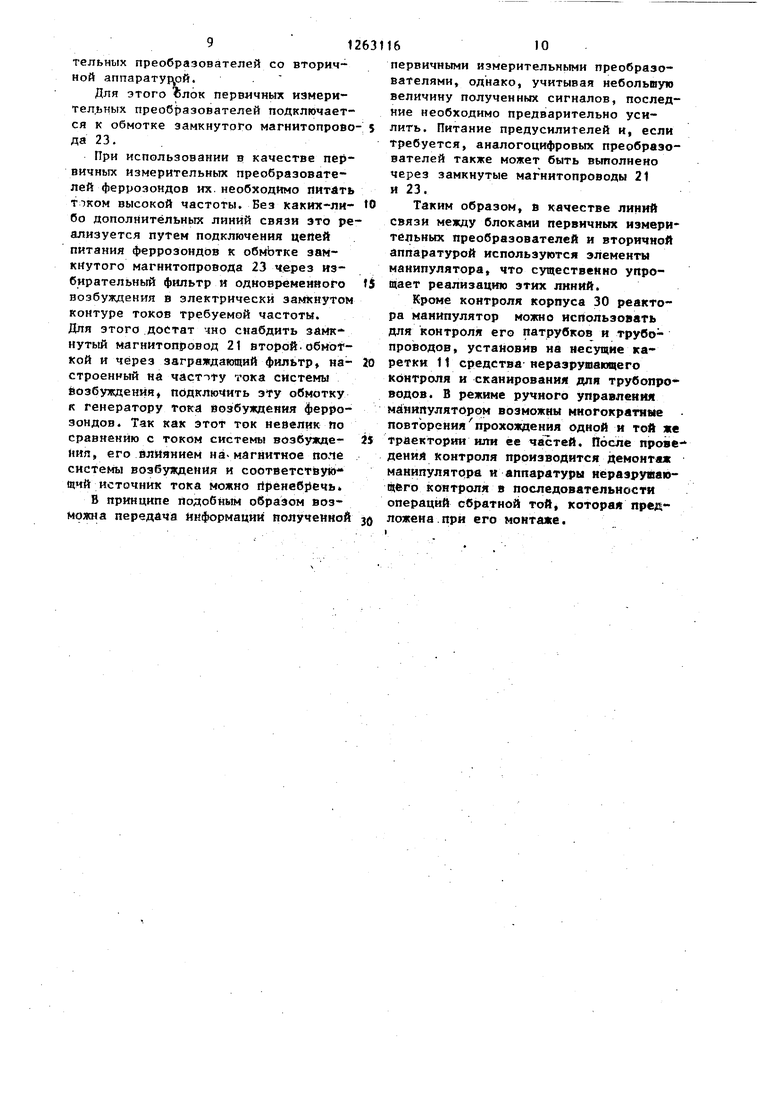
Кроме того, с внутренней стороны корпуса несущей каретки установлен кронщтейн 59 с четырьмя биконическими роликами 60, между которыми установлен цилиндрический шток 61 с возможностью перемещения эдоль собственной оси. В штоке жестко заделаны концы нержавеющего каната 13. Плита 50 и боковины 51 снабжены каждая двумя монтажными пазами 62, обеспечивающими возможность установки раз личного технологического оборудования контроля. Привод 12 перемещения несушей каретки 11 закреплен на перемычке 9, его возможное конструктивное исполнение представлено на фиг. 9. Это двух барабанная лебедка, все элементы которой смонтированы в разборном много детальном корпусе 63. Барабаны 64 и 65 кинематически связаны между собой паразитной шестерней 66, приводящейся во вращение через систему зубчатых передач от электродвигатеj H 67. На барабаны намотан в несколь;ко витков нержавеющий канат 13, закрепленный концами на несущей каретке 11, В данном случае система зубчатых передач выполнена с возможностью изменения скорости перемещени каретки 11 с замедленной, когда вза цеплении находятся зубчатые колеса 6 и 69, на ускоренную, когда в зацепле нии между собой вводятся зубчатые колеса 68 и 70. В кинематическую цепь замедленной зубчатой передачи введен механизм 71 мальтийского креста, предназначенный для Осуществления дискретной подачи каретки по траектории 72. Для остановки привода в дискретном режиме Перемещения каретки предназначен блокирующий пе реключатель 73, приводной элемент кнопки которого состоит в кинематической связи с мальтийским крестом механизма 71. Ускоренное перемещение .каретки должно быть непрерыв ным для контроля по траектории 74. Могут быть и другие конструктивные решения привода 12 перемещения несущей каретки, например взамен механизма мальтийского креста можно применить щаговый электродвигатель 67 С осью барабана 65 напрямую кинем тически соединен датчик 75 линейной координаты несущей саретки 11, например сельсин. Помимо датчика линей ной координаты с целью грубой ее визуализации непосредственно на манипу ляторе в приводе предусматривается о счетное устройство, состоящее из ука зателя-кулачка 76, кинематически свя занного трансформирующей зубчатой пе редачей с тем же барабаном 65 и круговой шкалой 77, проградированной в единицах длины в пределах полного хода несущей каретки от нулевого До конечного значения (можно условно пр нять за нулевое положение несущей каретки центр эллиптического днища реактора, а за конечное значение - положение несколько выше главного ра1зъема реактора). На шкале 77 установлены два концевых переключателя 78 и возможностью перемещения и фиксации каждого в пределах всей шкалы, приводные элементы, кнопки которых состоят в кинематической связи с указателем-кулачком 76. Перемещение концевых переключателей 78 по шкале 77 обеспечивает возможность изменения амплитуды, начала и конца траектории 74, а также изменения числа кольцевых строк траектории 79 при контроле. Для возможности наблюдения за показаниями отсчетного устройства съемную крьппку ВО выполняют из прозрачного материала и зону отсчета оборудуют встроенным заливающим освещением. Манипулятор для неразрущающего контроля корпуса 30 реактора работает следующим образом. Сначала манипулятор монтируют на главном разъеме реактора с помощью штатных грузоподъемных средств станции. Для этого необходимо подать, используя отверстия 81 (см. фиг.4) в ребрах 35, неподвижный опорный погон 3, установить и сцентрировать его относительно щпилек 31 реактора, за специальные такелажные отверстия подать, установить и сцентрировать на неподвижном опорном погоне 3 поворотный мост 4, вращением червяка червячной пары 43 повернуть редуктор 40 привода азимутального вращения и тем самым ввести в кинематическое зацепление его звездочки 37 и реактивный ролик 38 с пластинчатой цепью 36 и промежуточным кольцон 33 соответственно. Вращением штурвала 25 устанавли вают дистанционирующие распорки 14 в рабочее горизонтальное положение. Вручную вращением рукоятки ручного управления привода перемещения каретки выводят каретку 1 i в крайнееверхнее положение. Устанавливают в реакторном зале пульт управления манипулятором для неразрушающего контроля корпуса реактора и вторичные блоки аппаратуры неразрушапщего контроля, иа каретках 11 закрепляют первичные блоки аппаратуры неразрушающего контроля. ) Г11.)оизволят злгктричес.кии монтаж манипулятора и аг1Г яратуры неразрушающего контроля. Все лилии связи блоков, установленных на несущих каретках 11, заласовынают в собственные накопители 19 кабеля. Все силовые и сигнальные линии могут быть смонтированы двояко в зависимости от принятой технологии неразрушающего контроля: или через вращающийся электрический переход 28, или минуя, его. В обоих случаях все элект рические линии должны быть трассированы в ориентирующем ложементе 26 и через его распределительную коробку 27 соединены с линиями пульта 1 управления и вторичными блоками апIпаратуры неразрушающего контроля. Вторично убеждаются в правильности всего электромонтажа и после этого пульт 1 управления и вторичные блоки неразрушающего контроля включают в электрическую сеть. В манипуляторе возможны по меньшей мере два режима работы: автоматический и с ручным управлением с пульта 1, с использованием световой, цифровой и других видов индикации, и вторичные блоки аппаратуры неразрушающего контроля, а также необходимо электро технические, механические, блокирующие и переключающие устройства. В обоих режимах работы предполагается вести контроль по меньшей мере по трем эквивалентным траекториям развертки поверхности корпуса реакто ра: по цилиндрической винтовой траек тории 79 с непрерывным вращательным движением поворотного моста 4 И пост пательным движением несущей каретки 11; по цилиндрической возвратнопоступательной траектории 72 вращательного движения поворотного моста 4 и дискретной подачи несущей каретки 11; по образующей корпуса реак тора возвратно-поступательной траектории 74 линейного перемещения несущей каретки 11 и дискретной подачи поворотного моста 4. После подачи электрического питания на привод 6 азимутального вращения и привод 12 перемещения каретки производят управление процессом конт роля корпуса реактора с .пульта 1 управления в любом желаемом режиме и. по любой из предполагаемых траекто рий. При необходимости использования электромагнитной аппаратуры неразрушаюцего К1)Г{Т1п: Ля в к ччгст И ллсмонтл системы возбуждения магнитного поля используется электрически замкпутыЛ кпнтур, образора1гный U-образппй рамой 7 и верхней перемычкой 8. Лля этого обмотка замкнутого магнитопровода 21 подключается к источнику переменного тока, например к сети переменного тока частотой 50 Гц. В результате магнитный поток, локализированный в магнитопроводе, сцепляется с упомянутым электрически замкнутым контуром, вызывая в нем электрический ток. Поперечное сечение U-образной рамы 7 и верхней перемычки 8 достаточно велико исходя из требований жесткости направляющей манипулятора. По этой причине электрическое сопротивление контура мало и в полученной системе возбуждения достигаются токи требуемой величины. Как известно, глу&ина промагничивания определяется размером возбуждакяцего контура и частотой тока возбуждения. Полученная система возбуждения обеспечивает глубину про- магничивания, начиная с максимально возможной. Кроме того, перемещаясь вдоль и-образной рамы 7 и будучи жестко с ней связанными в прочих направлениях, измерительные преобразователи магнитного поля взаимодействуют с возбуждающим полем неизменной величины и вторичным магнитным полем, определяемым качеством контролируемого унастка. При ориентации Ьси первичных измерительных преобразователей по нормам к контролируемой поверхности измерительные преобразователи будут вырабатьшать сигнал только при наличии дефектов сплошности. Таким образомэ при использовании рассмотренной системы возбуждения возможна компенсация исходного уровня сигнала, не связанного с выявляемыми дефектами. С учетом сказанного, рассмотренная система возбуждения может быть признана оптимальной. В то же время для ее реализации не требуется дополнительных металлоемких элементов, так как с этой целью используются элементы манипулятора. Электрическая изоляция верхней перемычки 8 от реактора кбобходима для локализации возбужденного замкнутым магнитопроводом 21 тока в образованном верхней перемычкой 8 и U-обраэной рамой 7 электрически замкнутом контуре. Последний может быть использован и для связи первичных измери912
тельных преобразователей со вторичной аппаратушэй.
Для этого Слок первичных измерительных преобразователей подключается к обмотке замкнутого магнитопрово да 23. .
При использовании в качестве первичных измерительных преобразователей феррозондов их. необходимо питать Т1КОМ высокой частоты. Без каких-либо дополнительных линий связи это реализуется путем подключения цепей питания феррозондов к обмЬтке замкнутого магнитопровода 23 через избирательный фильтр и одновременного возбуждения в электрически замкнутом контуре токов требуемой частоты. Для этого достат чно сиабдить замкнутый магнитоп ровод 21 второй, обмоткой и через заграждающий фильтр, настроенный на частоту тока системы возбуждения подключить эту обмотку к генератору тока йозбуждеяия феррозондов. Так как этот ток невелик по сравнению с током системы возбузкденип, его влиянием на-магнитное поле системы возбуждения и соответствую щчй источник тока можно йренебречь
В принципе подобным образом возможна передача информации полученной
10
первичными измерительными преобразователями, однако, учитывая небольшую величину полученных сигналов, последние необходимо предварительно усилить. Питание предусилителей и, если требуется, аналогоцифровых преобразователей также может быть выполнено через замкнутые магнитопроводы 21 и 23.
Таким образом, в качестве линий связи между блоками первичных измери тельных преобразователей и вторичной аппаратурой используются элементы манипулятора, что существейно упрощает реализацию этих линий.
Кроме контроля корпуса 30 реактора манипулятор можно использовать для контроля его патрубков и трубопро водо0, установив на несущие каретки 11 средства- нераэрушающего коитроля и сканирования для трубопроводов. В режиме ручиого управления манипулятором возможны многократиые повторения прохояздения одной и той же траектории или ее частей. После прозе дений Контроля производится демонтаж манипулятора и аппаратуры нёраэрувающего контроля в последовательности операций обратной той, которая предложена .при его монтаже.
Z7
46
J/
QXJ2.1
В
8uiA
21
iiiiiri
.3
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ МАГНИТНОЙ ДЕФЕКТОСКОПИИ СТЕНОК СТАЛЬНЫХ ТРУБОПРОВОДОВ | 1993 |
|
RU2102737C1 |
| Способ сканирования объекта инспекции по площади и установка для его осуществления | 2022 |
|
RU2782504C1 |
| УСТАНОВКА ИЗМЕРИТЕЛЬНАЯ УЛЬТРАЗВУКОВАЯ И МЕХАНОАКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕЕ | 2007 |
|
RU2351926C2 |
| МАНИПУЛЯЦИОННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 2015 |
|
RU2607721C1 |
| АГРОМОДУЛЬ | 2010 |
|
RU2451441C1 |
| МАГНИТОУПРУГИЙ ДАТЧИК | 2005 |
|
RU2295118C1 |
| Установка для дефектоскопического сканирования | 2022 |
|
RU2782309C1 |
| УСТАНОВКА ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КОРПУСА ЯДЕРНОГО РЕАКТОРА | 1990 |
|
RU2040052C1 |
| Намагничивающее устройство дефектоскопа | 2019 |
|
RU2715473C1 |


МАНИПУЛЯТОР ДЛЯ НЕРАЗРУШАКЬ ЩЕГО КОНТРОЛЯ КОРПУСА РЕАКТОРА, содержащий неподвижный опорный погон, .поворотный мост На опорных катках, привод азимутального ращенй), размещенный на поворотном мосте и кинематически связанный с опорным погоном, направляющую, жестко связанную с поворотным мостом, по меньшей мере одну несущую каретку, предназначенную дпя размещения первичных блоков аппаратуры неразрушающёго контроля и вьтолненную с возможностью перемещения вдоль направляющей, пульт.управления и линии связи, о т л н ч а 10щ и и с я тем, что, с целью увеличения объема и качества контроля, он снабжен замкнутым магнитопроводом с обмоткой, направляющая выполнена в форме и-образной рамы, снабженной верхней перемычкой, образующей с (Л С. и7образной рамой электрически замкнутый контур, Последний сцеплен с замкнутым магнитопроводом и электрически изолирован относительно окружающей среды
ФмЛ
«J
1263116
бидд
12
фиг.Ю
| Maschinenfabrik Augsburg-Nilrnberg (M.A.N.) Sonderdruck aus. | |||
| der JFachzeischrift Kemtechnik Isotopentechnik und chemie Ig | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАСТРАИВАНИЯ СТРУН В АВТОМАТИЧЕСКИХ СТРУННЫХ ИНСТРУМЕНТАХ | 1925 |
|
SU971A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Прецизионный слюдяной конденсатор | 1936 |
|
SU47754A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
