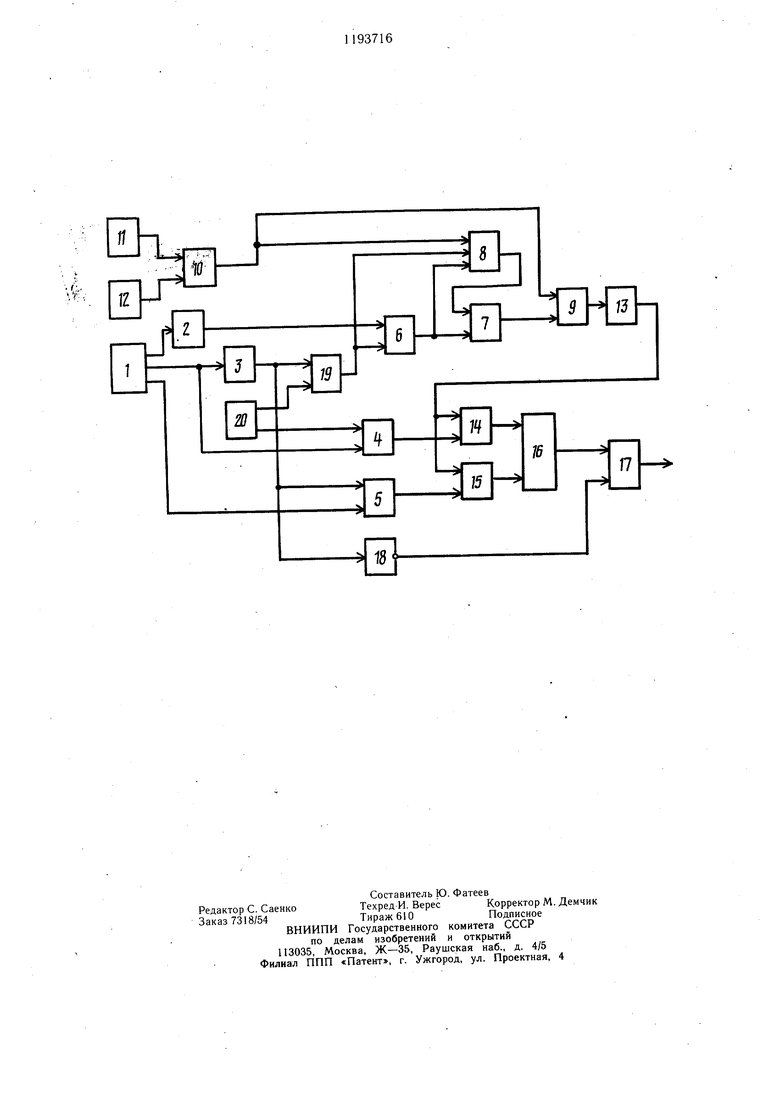
Изобретение относится к измерительной технике и может быть использовано, например, для измерения скорости движения автотранспорта и определения типов движущихся транспортных средств. Цель изобретения - повышение точности измерения скорости и расширение функциональных возможностей устройства. На чертеже изображена схема предлагаемого устройства. Устройство содержит приемник 1 изображения, аналого-цифровой преобразователь 2, блок 3 селекции строчных импульсов, счетчики 4 и 5, элемент И 6, блок 7 сравнения видеосигналов, блок 8 памяти видеосигналов, элемент И 9, реверсивный счетчик 10, детектора И и 12 транспорта, блок 13 селекции перепада видеоси1;нала, элементы И 14 и 15, блок 16 памяти, блок 17 сравнения, элемент НЕ 18, элемент И 19, синхронизатор 20. В качестве приемника 1 изображения может быть использована, например, стандартная передающая телевизионная камера, устанавливаемая таким образом, что направление ее строчной развертки совпадает с основным направлением движения объектов, т. е. параллельно полотну дороги в зоне контроля. В качестве детекторов 11 и 12 транспорта могут быть использованы любые известные устройства (как контактнь1е, например пневматические, так и бесконтактные, например индуктивные, ультразвуковые, фотоэлектрические), которые выдают сигнал о прохождении объектом контролируемого сечения дороги. Чувствительный элемент первого детектора 11 транспорта устанавливается перед входным сечением контролируемой зоны,, охватываемой приемником 1 изображения. Чувствительный элемент второго, детектора 12 транспорта располагается за выходным сечением контролируемой зоны. Блок 3 селекции строчных импульсов представляет собой кольцевой счетчик, выдаюш,ий сигнал при появлении каждого N-ro строчного импульса. Число N определяется из следующих соображений. Поскольку направление строчной развертки приемника 1 изображения параллельно полотну дороги, то оно принимается за направление одной из осей координат (ось Y). Тогда номер строки определяет значение координаты Y объекта. Таким образом, значение N определяется из выражения Н. п где Z - число строк разложения. п - ширина зоны, охватываемой приемДУ - дискрет определения координаты Y. Блок 7 сравнения видеосигналов состоит из сумматоров по модулю два (по одному на кажйый разряд), выходы которых подключены к схеме ИЛИ. Блок 8 памяти видеосигналов состоит из оперативного запоминающего устройства, построенного на триггерных ячейках с использованием БИС ОЗУ, и схемы формирования адреса, содержащей счетчик и дешифратор. Емкость ОЗУ составляет NX- М, где М - число отсчетов координаты X поодной строке изображения. Блок 13 селекции перепада видеосигнала может быть реализован, например, в виде сумматора по модулю два, один вход которого через элемент задержки связан с входом данного блока, а другой вход соединен с ним непосредственно. Синхронизатор 20 представляет собой генератор тактовой частоты, которая определяется из выражения. . М, где fc - частота следования строк развертки; М - число отсчетов координаты X по одной строке. При этом М -, где f- длина зоны, охватываемой приемником 1 изображения; ЛХ-дискрет определения координаты X. Устройство работает следующим образом. Приемник 1 изображения производит преобразование визуальной информации о состоянии зоны контроля в электрический сигнал, который поступает на вход аналогоцифрового преобразователя 2, где производится преобразование видеосигнала в двоичный код. Разрядность кода определяется из условия устойчивого разделения объекта и фона. Код с выхода аналого-цифрового преобразователя 2 поступает на первый вход элемента 6 И. С второго выхода приемника 1 изображения строчные импульсы поступают на вход схемы 3 селекции строчных импульсов, которая формирует выходной сигнал при появлении каждого N-ro строчного импульса и держит его до появления (N+1) строчного импульса. Этот сигнал поступает на первый вход элемента 19 И и разрешает прохождение через этот элемент сигналов тактовой частоты, поступающих на его второй вход с первого выхода синхронизатора 20. Тактовые импульсы с выхода элемента И 19 поступают на второй вход элемента И 6, разрешая тем самым прохождение на его выход кодовых комбинаций с выхода аналого-цифрового преобразователя 2, соответствующих значениям квантованного видеосигнала в точках отсчета по оси X. Одновременно сигналы тактовой частоты с выхода элемента И 19 поступают на первый вход блока 8 памяти видеосигналов для управления записью и считыванием кодовых комбинаций точек отсчета. С выхода элемента И 6 кодовые комбинации поступают на соответствующие входы блока 8 памяти видеосигналов и блока 7 сравнения видеосигналов. Сигналы с первого детектора 11 транспорта, чувствительный элемент которого размещен на входе зоны контроля, поступают на прямой вход реверсивного счетчика 10, на обратный вход которого подаются сигналы с второго детектора 12, транспорта, чувствительный элемент которого размещен на выходе зоны контроля. Запуск устройства производится в тот момент, когда в зоне контроля отсутствуют транспортные средства, поэтому нулевое состояние реверсивного счетчика 10 свидетельствует о том, что в данный момент времени зона контроля свободна от контролируемых объектов. Реверсивный счетчик 10, приходя в нулевое состояние, формирует на выходе сигнал, который поступает на третий вход блока 8 памяти видеосигнала, переводя его в режим записи, и на первый вход элемента И 9, запрещая прохождение на его выход сигналов с блока 7 сравнения видеосигналов. В режиме записи блок 8 памяти видеосигналов производит запись кодовых комбинаций, поступающих с выхода элемента И 6. Эти кодовые комбинации содержат информацию об изображении зоны контроля - фоне. При появлении в зоне контроля транспортного средства реверсивный счетчик 10 выходит из нулевого состояния и своим выходным сигналом снимает сигнал записи с блока 8 памяти видеосигналов, который переходит при этом в режим считывания, и одновременно открывает элемент И 9. Кодовые комбинации, характеризующие текущее состояние зоны контроля, с выхода элемента И 6 поступают на один из входов блока 7 сравнения видеосигналов, на другой вход которого подаются кодовые сигналы, считываемые из блока 8 памяти видеосигналов импульсами с выхода элемента И 19, которые характеризуют фон. Сигнал на выходе блока 7 сравнения появляется при несовпадении поступивщих на его вход кодовых комбинаций, т. е. при появлении на уровне фона постороннего объекта. Этот сигнал через элемент И 9 поступает на вход блока 13 селекции перепада видеосигнала, который формирует имп,ульсы характеризующие начало и конец проекции, транспортного средства на строку развертки видеосигнала. Счетчик 4 производит счет тактовых импульсов, определяющих отсчет координат но оси X, поступающих на его вход с второго выхода синхронизатора 20. Сброс счетчика 4 производится строчными импульсами, гюступающи.ми на его второй вход с второго выхода приемника 1 изображения, так как координата X определяется по расстоянию от начала строки до объекта. Счетчик 5 подсчитывает импульсы, поступающие на его вход с выхода блока 3 селекции строчных импульсов. Эти импульсы характеризуют приращение координаты Y. Сброс счетчика 5 производится кадровыми импульсами, поступающими на его второйвход с третьего выхода приемника 1 изображения. Сигналы, характеризующие состояния счетчиков 4 и 5, постоянно подаются на вторые входы элементов И 14 и 15 соответственно. При поступлении на первые входы элементов И 14 и 15 сигналов с выхода блока 13 селекции перепада видеосигналов информация о состоянии счетчиков 4 и 5 записывается в блок 18 па.мяти. По окончании N-й строки в блоке 16 памяти оказываются записанными координаты отрезков проекций объектов, находящихся в контролируемой зоне, на эту строку. При этом сигнал на выходе блока 3 селекции строчных импульсов исчезает и соответственно юявляется сигнал на вь ходе инвертора, который поступает на вход блока 17 сравнения и инициирует считывание инфор.мации на блоке 16 памяти. Цикл определения и записи координат повторяется каждую .N-ю строку до окончания кадра. По окончании кадра блок 17 сравнения производит опре.аеление координат транспортных средств и их типа путем сравнения площади пятна проекции транспортных средств на полотно дороги с заранее определенными эталонными значениями. В следующем кадре полностью повторяется весь цикл работы устройства по пределению координат и типов транспортных средств в зоне контроля. Определение скорости транспортных средств производится путем сравнения координат транспортного средства в моменты времени (в различны.х кадрах).
t
/3
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Селекатор телевизионных сигналов | 1975 |
|
SU748899A1 |
| Устройство для отображения информации на телевизионном приемнике | 1979 |
|
SU932531A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для отображения графической информации на экране телевизионного приемника | 1982 |
|
SU1098030A1 |
| Устройство для отображения графической информации | 1976 |
|
SU715567A1 |
| Устройство для автоматической компенсации неравномерности фона видеосигнала | 1980 |
|
SU924914A2 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| Устройство для селекции элементов телевизионного изображения | 1983 |
|
SU1256054A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ,ОБЪ ЕКТОВ И ИХ ТИПОВ, содержащее приемник изображения, синхронизатор, блок памяти видеосигналов, выход которого соединен с первым входом блока сравнения видеосигналов, отличающееся тем, что, с целью повышения точности и расширения функциональных возможностей устройства, в него введены аналого-цифровой преобразователь, два детектора транспорта, реверсивный счетчик, пять элементов И, два счетчика, блок селекции строчных импульсов, блок селекции перепада видеосигнала, элемент НЕ, блок памяти, блок сравнения, первый выход приемника изобра-. жения соединен с входом аналого-цифрового преобразователя, выход которого соединен с первым входом первого элемента И, выход которого подключен к первому входу блока памяти видеосигналов и к второму входу блока сравнения видеосигналов. выход которого подключен к первому входу второго элемента И, выход которого соединен с входом блока селекции перепада видеосигнала, выход которого соединен с первыми входами третьего и четвертого элементов И, выходы которы.х соединены с соответствующими входами блока памяти, выход которого подключен к первому входу блока сравнения, второй выход приемника изображения соединен с первым в.ходом первого счетчИка и с входом блока селекции строчных импульсов, выход которого подключен к входу элемента НЕ, к первому входу второго счетчика, первому входу пятого элемента И, выход которого соединен с вторым входом первого элемента И, с вторым входом блока памяти видеоi сигналов, третий выход приемника изображения подключен к второму входу второго (Л счетчика, выход которого соединен с вторым входом четвертого элемента И, первый выс: ход синхронизатора соединен с вторым входом пятого элемента И, второй выход синхронизатора соединен с вторым входом первого счетчика; выход которого подключен к второму входу третьего элемента И, выходы первого и второго детекторов транспорта соединены с соответствующими входами реверсивного счетчика, со со выход которого подключен к третьему входу блока памяти видеосигналов и к второму входу второго элемента И, при этом выход элемента НЕ соединен с вторым входом блока сравнения, выход которого является О5 выходом устройства.
| 0 |
|
SU400848A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Телевизионное устройство для измерения скорости движения объекта | 1979 |
|
SU792140A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
