тора скорости и четьфе сумматора, причем первый вход измерителя координат характерной точки соединен с выходом порогового блока, второй и третий входы - соответственно с тре-. тьим и четвертым выходами блока управления стробами, вход растровых элементов - с выходом растровых эле-, ментов синхронизатора, вход строчных синхроимпульсов - с выходом строчных синхроимпульсов синхронизатора, стробирующий вход 7 с выходом большого строба формирователя стробов, первый выход - с первьм входом измерителя вектора скорости, а второй выход - с вторьм входом измерителя вектора скорости, выход первого сумматора подклочен к пятсму входу блока управления стробами и к первому входу второго сумматора, выход которого подключен к третьему входу измерителя вектора скорости, выход третьего сумматора подключен к шестому входу блока управления стробами и к первому входу четвертого сумматора, выход которого соединен с четвертым входом измерителя вектора скорости, первый вход третьего сумматора соединен с первым выходом блока управления стробами, а второй вход - с первьм выходом измерителя вектора,скорости, первый вход первого сумматора подключен к второму выходу блока управления стробами, а второй вход - к второму выходу измерителя вектора скорости, второй вход четвертого сумматора и второй вход второго сумматора соединены соответственно с первым и вторым выходами регистра фиксации координат максимума.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |
| Устройство для обработки изображений | 1989 |
|
SU1772806A1 |
| Оптикоэлектронный координатор для автоматического вождения мобильных агрегатов | 1986 |
|
SU1378086A1 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| Устройство для воспроизведения видеосигнала | 1982 |
|
SU1069189A1 |
| Устройство для выделения изображений подвижных объектов | 1987 |
|
SU1462373A1 |
| Устройство для отображения графической информации на экране телевизионного приемника | 1981 |
|
SU1084865A1 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1990 |
|
SU1806445A3 |
ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР, содержащий последовательно соединенные телеви:эионную камеру, пороговый блок, блок памяти текущего изображения, цифровой коррелятор, регистр хранения, кo mapaтop и регистр фиксации координат максимума, синхронизатор и видеоконтрольное устройство, первый вход которого,и вход синхронизатора соединены с выходом телевизионной камеры, формирователь стробов, выход сигнала Окно которого подключен к второму входу видеоконтрольного устройства, блок управления стробами, управляющий выход которого подключен к управляющему входу формирователя стробов, пульт управления, блок адресации, блок памяти эталонного изображения и элемент И, причем четыре выхода пульта управления соединены с соответствующими четырьмя входами блока управления стробами, а пятый выход - с первьм входом элемента И, второй вход которого соединен с выходом малого строба формирователя стробов, а выход - со стробирующим входом блока памяти эталонного изображения и входом малого строба блока адресации, выход растровых элементов синхронизатора подключен к входам растровых элементов формирователя стробов, блока управления стробами и блока адресации, выход строчных синхроимпульсов синхронизатора подключен к входа ртрочных синхроимпульсов формирователя стробов и блока управления стробами, вькод большого строба формирователя стробов соединен с входом большого строба блока адресации и стробирующим входом блока памяти текущего изображения, первый адресный вход котоW рого соединен с первым выходом блока адресации, а второй адресный вход - с вторым выходе блока адресации, третий выход которого подключен к второму адресному входу блока памяти эталонного изображения, а четвертый выход - к первому вдресному входу блока памяти эталонного изображения, информационный вход коСО торого соединен с выходом порогового блока, а выход - с-вторьм входом цифсо ел рового коррелятора, управляющий выход формирователя стробов подключен а к управляющему входу блока адресации, пятый и шестой выходы которого соединены соответственно с первьв4 и вторым входами регистра фиксации координат максимума, причем второй вход компаратора соединен с выходом цифрового коррелятора, а выход с вторьм входом регистра хранения, отличающийся тем, что, с целью увеличения быстродействия, в него введены измеритель координат характерной точки, измеритель век
Изобретение относится к области прикладного телевидения и может быть использовано для дистанционного автоматического измерения параметров движения исследуемых объектов.
Известно устройство для слежения за точечным объектом, содержащее последовательно соединенные телевизионную камеру, пороговый блок, первый элемент И, инвертор, второй элемент И, первый элемент ИЛИ, координатный блок и генератор стробимпульса. Выход первого элемента И подключен через последовательно соединенные блок задержки, второй элемент ИЛИ и триггер запрета к первсму входу третьего элемента И, второй вход которого соединен с выходом инвертора, третий вход - с одним из выходов триггера коммутации, а выход - с вторым входом первого элмента ИЛИ, другой выход триггера коммутации соединен с одним из входов второго элемента И. Выход генератора стробимпульоа соединен с вторым входом первого элемента И. Вход передающей камеры, второй вход второго элемента ИЛИ, вход триггера коммутации и второй вход координатного блока подключен к выходу синхроблока. Устройство осуществляет электронное слежение за движущимся точечным объектом на экране видеоконтрольного устройства (ВКУ) с помощью следящего строба и измерение его координат в плоскости изображения .1 ).
Недостатком устройства является
невозможность измерения координат движущегося протяженного объекта, так как в этом случае на вькоде порогового блока может появиться несколько импульсов, которые вызовут
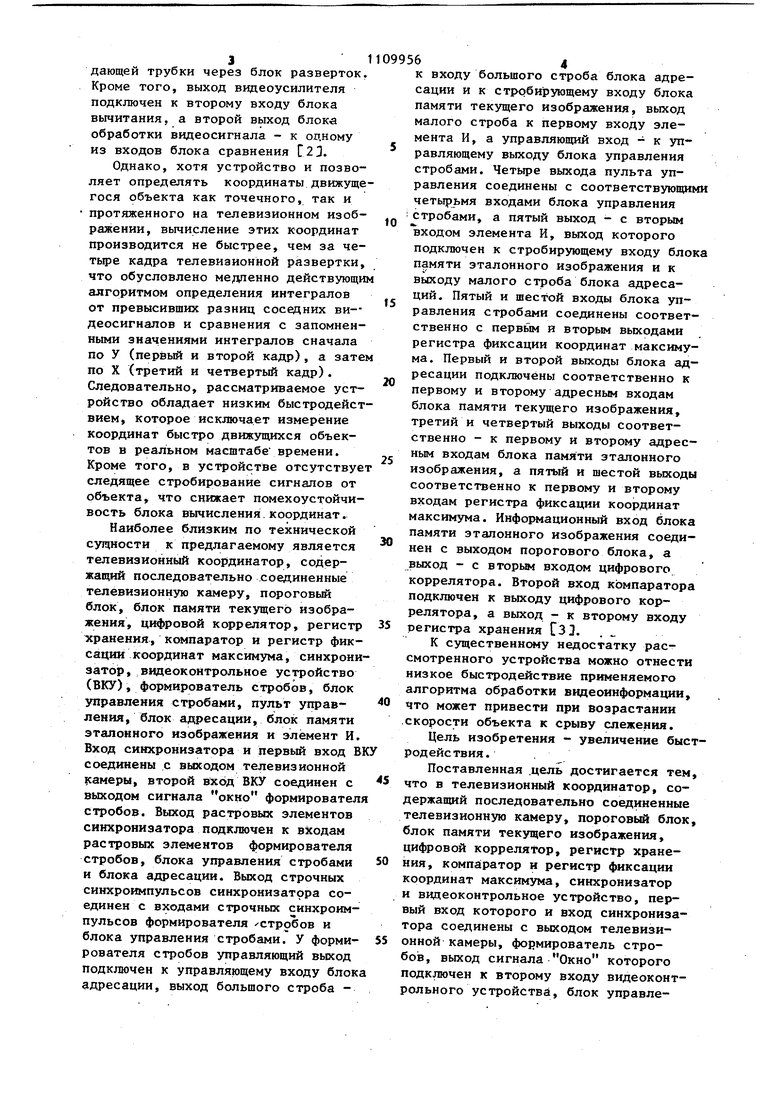
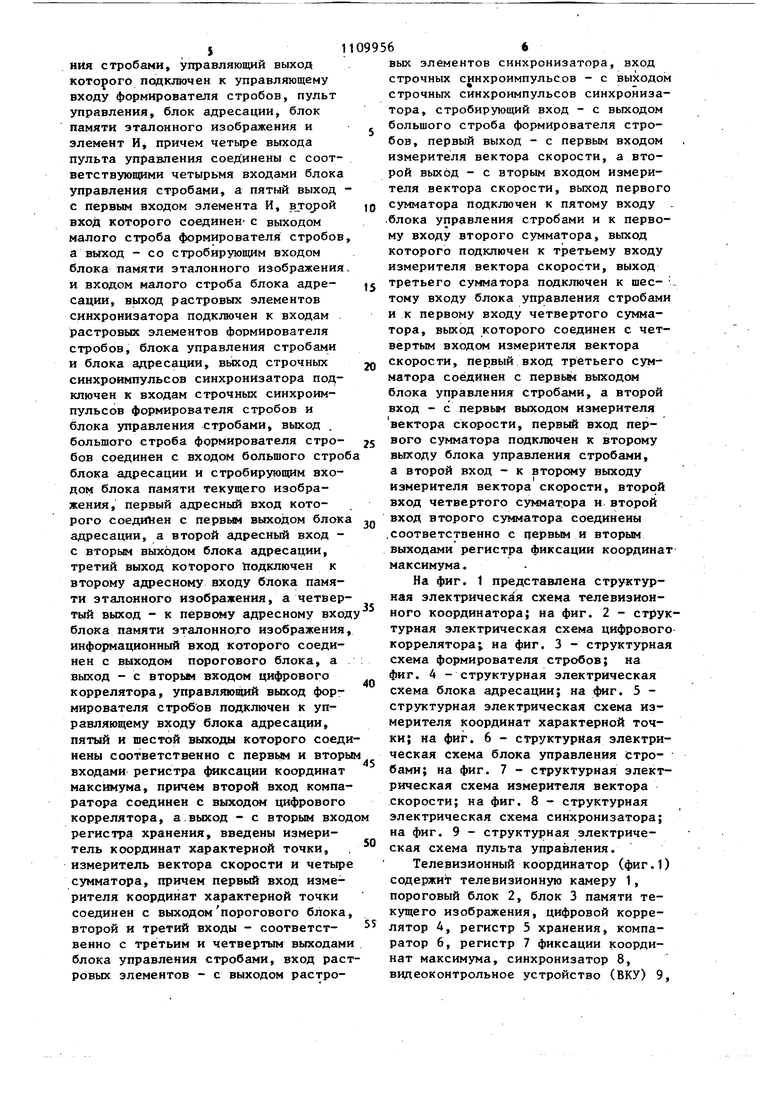
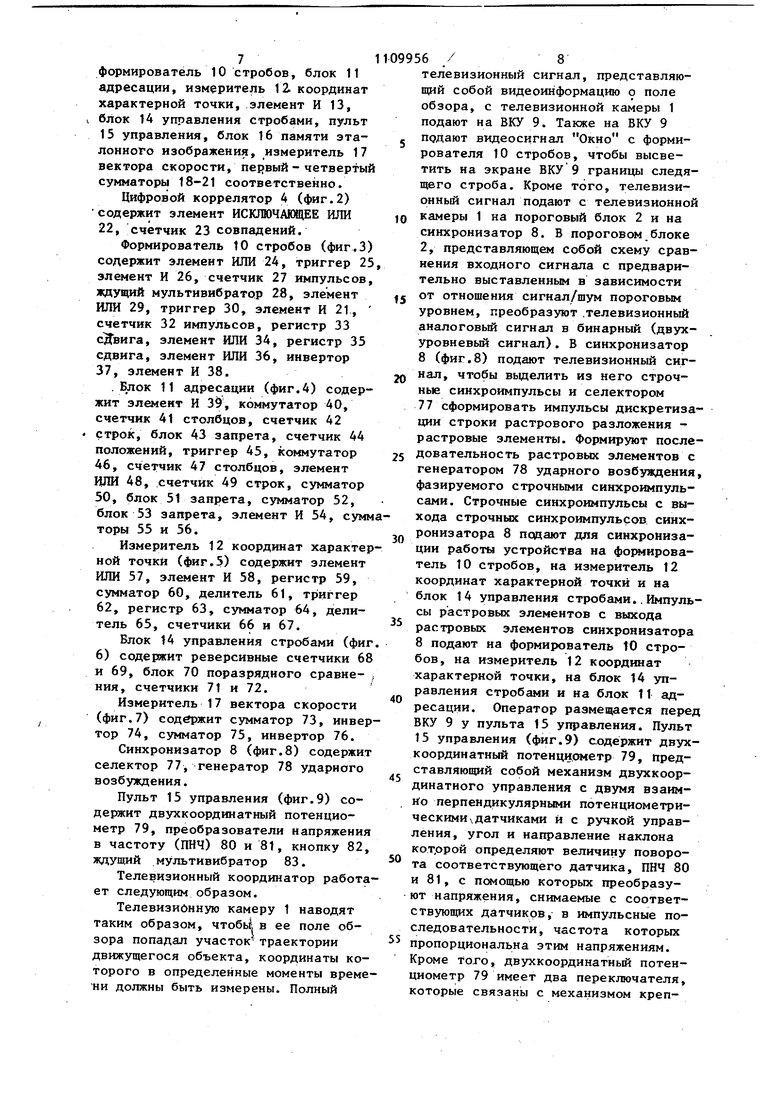
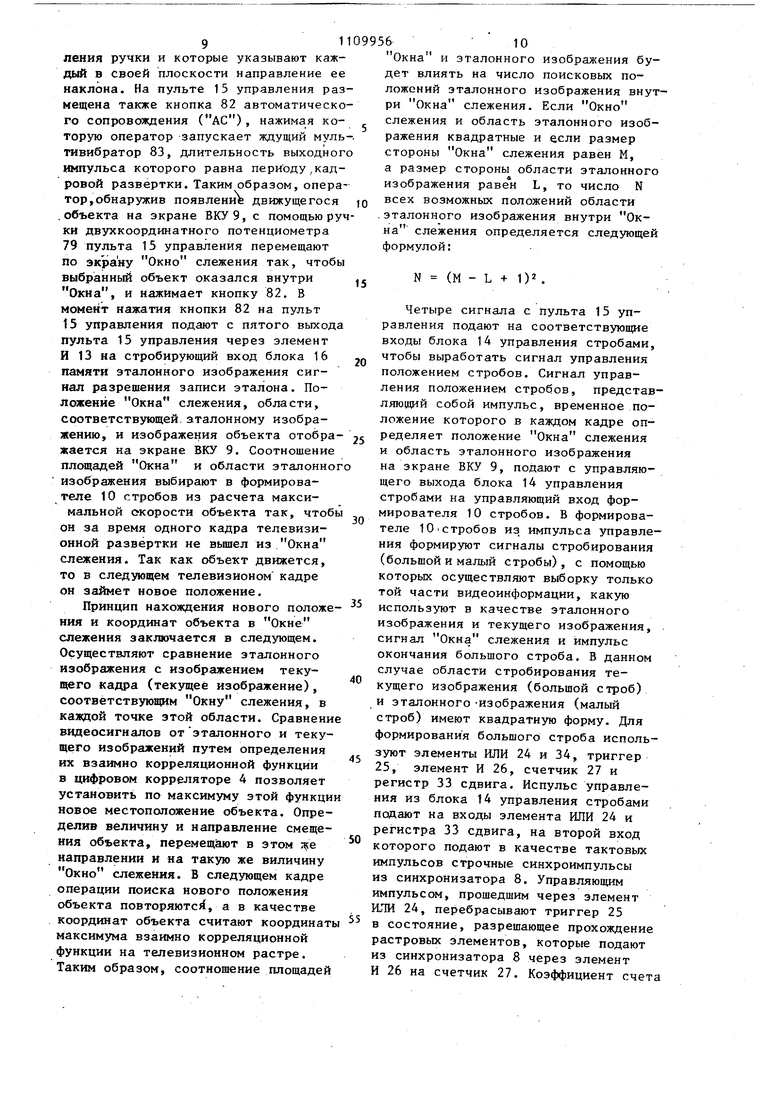
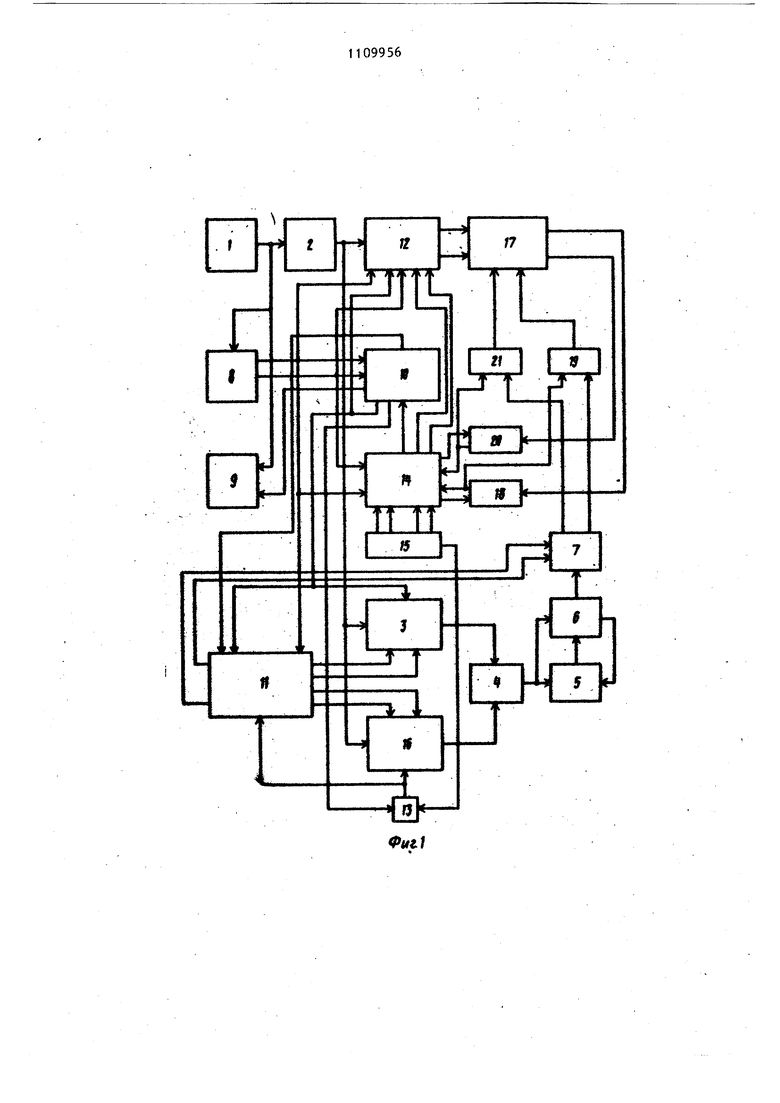
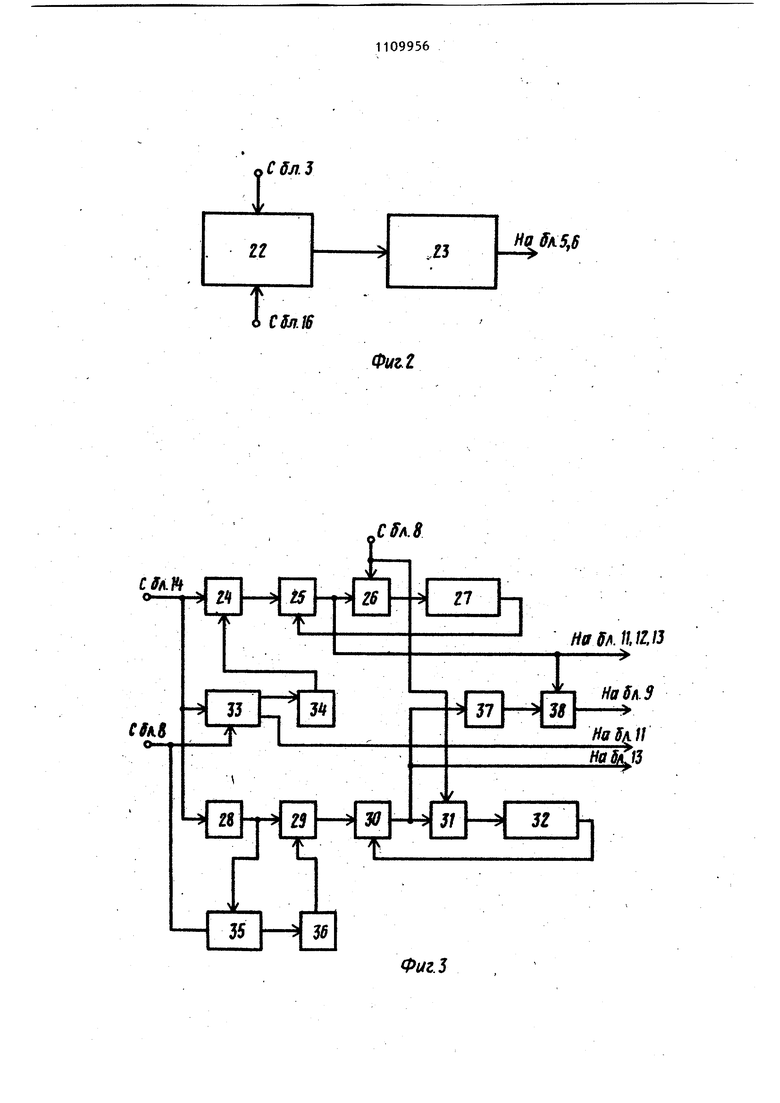
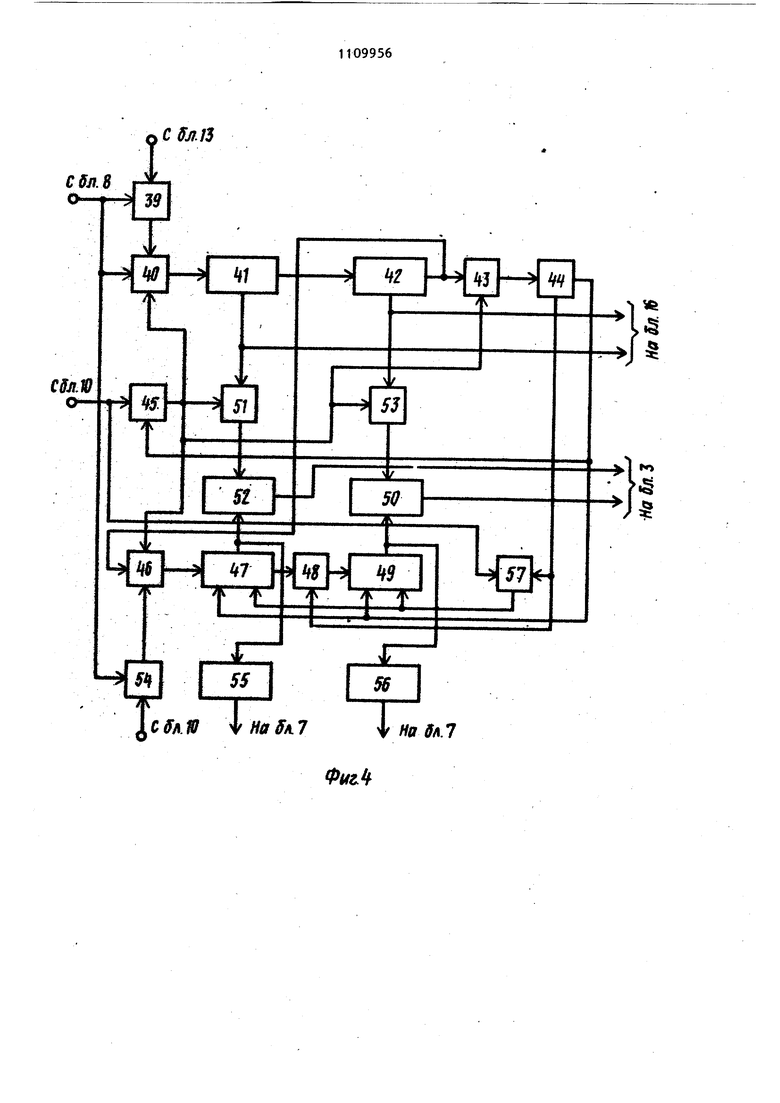
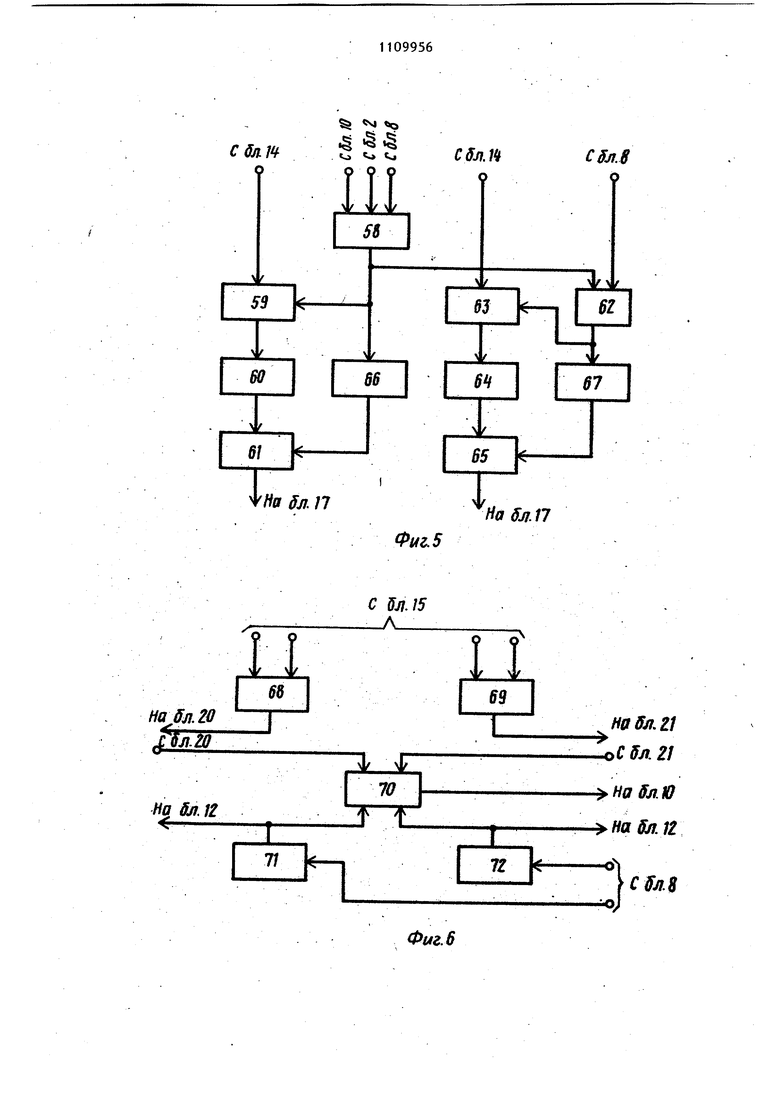
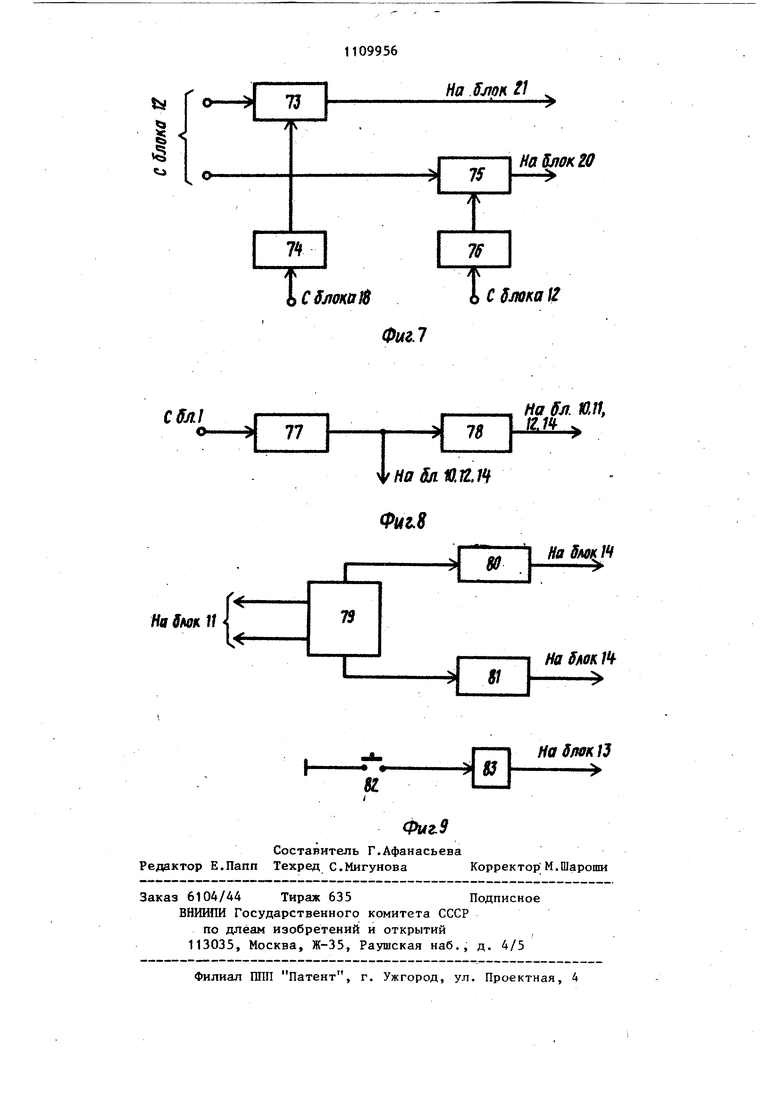
неоднозначность в отсчете координат. Известно телевизионное устройство селекции движущегося объекта и определения его координат, содержащее последовательно соединенные телевизионную трубку, видеоусилитель, линии задержки, блок вычитания, двухполярный пороговый блок, блок обработки видеосигнала, блок памяти, блок сравнения и блок вычисления координат, синхронизатор, выходы которого подключены к соответствующим входам блока обработки видеосигнала, блока сравнения, блока вычисления коордиант и телевизионной передающей трубки через блок разверток. Кроме того, выход видеоусилителя подключен к второму входу блока вычитания, а второй выход блока обработки видеосигнала - к одному из входов блока сравнения Г 23. Однако, хотя устройство и позволяет определять координаты движуще гося объекта как точечного, так и протяженного на телевизионном изображении, вычисление этих координат производится не быстрее, чем за четыре кадра телевизионной развертки, что обусловлено медленно действующи алгоритмом определения интегралов от превысивших разниц соседних ви- деосигналов и сравнения с запомненными значениями интегралов сначала по У (первый и второй кадр), а зате по X (третий и четвертый кадр). Следовательно, рассматриваемое устройство обладает низким быстродейст вием, которое исключает измерение координат быстро движущихся объектов в реальном масштабе времени. Кроме того, в устройстве отсутствуе следящее стробирование сигналов от объекта, что снижает помехоустойчивость блока вычисления.координат. Наиболее близким по технической сущности к предлагаемому является телевизионный координатор, содержащий последовательно соединенные телевизионную камеру, пороговый блок, блок памяти текущего изображения, цифровой коррелятор, регистр хранения, компаратор и регистр фиксации координат максимума, синхрони затор, видеоконтрольное устройство (ВКУ), формирователь стробов, блок управления стробами, пульт управления, блок адресации, блок памяти эталонного изображения и элемент И Вход синхронизатора и первый вход В соединены с выходом телевизионной ;самеры, второй вход ВКУ соединен с выходом сигнала окно формировател стробов. Выход растровых элементов синхронизатора подключен к входам растровых элементов формирователя стробов, блока управления стробами и блока адресации. Выход строчных синхроимпульсов синхронизатрра соединен с входами строчных синхроимпульсов формирователя стробов и блока управления стробами. У формирователя стробов управляющий выход подключен к управляющему входу блок адресации, выход большого строба к входу большого строба блока адресации и к стробирующему входу блока памяти текущего изображения, выход малого строба к первому входу элемента И, а управляющий вход - к управляющему выходу блока управления стробами. Четыре выхода пульта управления соединены с соответствующими четырьмя входами блока управления стробами, а пятый выход - с вторым входом элемента И, выход которого подключен к стробирующему входу блока памяти эталонного изображения и к выходу малого строба блока адресаций. Пятый и шестой входы блока управления стробами соединены соответственно с первым и BTopbiM выходами регистра фиксации координат максш ума. Первый и второй выходы блока адресации подключены соответственно к первому и второму адресным входам блока памяти текущего изображения, третий и четвертый выходы соответственно - к первому и второму адресным входам блока памяти эталонного изображения, а пятый и шестой выходы соответственно к первому и второму входам регистра фиксации координат максимума. Информационный вход блока памяти эталонного изображения соединен с выходом порогового блока, а выход - с вторьм входом цифрового коррелятора. Второй вход компаратора подключен к выходу цифрового коррелятора, а выход - к второму входу регистра хранения ГЗЗ. К существенному недостатку рассмотренного устройства можно отнести низкое быстродействие применяемого алгоритма обработки видеоинформации, что может привести при возрастании скорости объекта к срыву слежения. Цель изобретения - увеличение быстродействия. Поставленная .цель достигается тем, что в телевизионный координатор, содержащий последовательно соединенные телевизионную камеру, пороговый блок, блок памяти текущего изображения, цифровой коррелятор, регистр хранения, KOMnaipaTop и регистр фиксации координат максимума, синхронизатор и ввдеоконтрольное устройство, первый вход которого и вход синхронизатора соединены с выходом телевизионной камеры, формирователь стробов, выход сигнала Окно которого подключен к второму входу видеоконтрольного устройства, блок управления стробами, управляющий выход которого подключен к управляющему входу формирователя стробов, пульт управления, блок адресации, блок памяти эталонного изображения и элемент И, причем четыре выхода пульта управления соединены с соответствующими четырьмя входами блока управления стробами, а пятый выход с первым входом элемента И, второй вход которого соединен- с выходом малого строба формирователя стробов а выход - со стробируюва1м входом блока памяти эталонного изображения и входом малого строба блока адресации, выход растровых элементов синхронизатора подключен к входам растровых элементов формирователя стробов, блока управления стробами и блока адресации, выход строчных синхроимпульсов синхронизатора подкпючен к входам строчных синхроимпульсов формирователя стробов и блока управления стробами, вькод . большого строба формирователя стробов соединен с входом большого стро блока адресации и стробирующим входом блока памяти текущего изображения, первый адресный вход которого соединен с первым выходом блок адресации, а второй адресный вход с вторм выходом блока адресации, третий выход которого Подключен к второму адресному входу блока памяти эталонного изображения, а четвер тый выход - к первому адресному вхо блока памяти эталонного изображения информационный вход которого соединен с выходом порогового блока, а выход - с BTOpbw входом цифрового коррелятора, управляющий выход формирователя стробов подключен к управляющему входу блока адресации, пятый и шестой выходы которого соед нены соответственно с первым и втор входами регистра фиксации координат максимума, причем второй вход компа ратора соединен с выходом цифрового коррелятора, а.выход - с вторым вхо регистра хранения, введены измеритель координат характерной точки, измеритель вектора скорости и четыр сумматора, причем первый вход измерителя координат характерной точки соединен с выходомпорогового блока второй и третий входы - соответственно с третьим и четвертым выходам блока управления стробами, вход рас ровых элементов - с выходом растровых элементов синхронизатора, вход строчных синхроимпульсов - с выходом строчных синхроимпульсов синхронизатора, стробирующий вход - с выходом большого строба формирователя стробов, первый выход - с первым входом измерителя вектора скорости, а второй выход - с вторым входом измерителя вектора скорости, выход первого сумматора подключен к пятому входу . .блока управления стробами и к первому входу второго сумматора, выход которого подключен к третьему входу измерителя вектора скорости, выход третьего сумматора подключен к шее-. тому входу блока управления стробами и к первому входу четвертого сумматора, выход которого соединен с четвертым входе измерителя вектора скорости, первый вход третьего сумматора соединен с первым выходсм блока управления стробами, а второй вход - с первьм выходом измерителя вектора скорости, первый вход первого сумматора подключен к второму выходу блока управления стробами, а второй вход - к вторсжу выходу измерителя вектора скорости, второй вход четвертого сумматора и второй вход второго сумматора соединены .соответственно с первым и вторым выходами регистра фиксации координат максимума. На фиг. 1 представлена структурная электрическая схема телевизионного координатора; на фиг. 2 - структурная электрическая схема цифрового коррелятора; на фиг. 3 - структурная схема формирователя стробов; на фиг. 4 - структурная электрическая схема блока адресации; на фиг. 5 структурная электрическая схема измерителя координат характерной точки; на фиг. 6 - структурная электрическая схема блока управления стробами; на фиг. 7 - структурная электрическая схема измерителя вектора скорости; на фиг. 8 - структурная электрическая схема синхронизатора; на фиг. 9 - структурная электрическая схема пульта управления. Телевизионный координатор (фиг.1) содержит телевизионную камеру 1, пороговый блок 2, блок 3 памяти текущего изображения, цифровой коррелятор 4, регистр 5 хранения, компаратор 6, регистр 7 фиксации координат максимума, синхронизатор 8, видеоконтрольное устройство (ВКУ) 9, формирователь 10 стробов, блок 11 адресации, измеритель 12 координат характерной точки, элемент И 13, блок 14 управления стробами, пульт 15 управления, блок 16 памяти эталонного изображения, измеритель 17 вектора скорости, первый - четвертый сумматоры 18-21 соответственно. Цифровой коррелятор 4 (фиг.2) содержит элемент ИСКЛЮЧАЩЕЕ ИЛИ 22, счётчик 23 совпадений. Формирователь tO стробов (фиг.З) содержит элемент ИЛИ 24, триггер 25 элемент И 26, счетчик 27 импульсов, ждущий мультивибратор 28, элемент ИЛИ 29, триггер 30, элемент И 21, счетчик 32 импульсов, регистр 33 сдвига, элемент ИЛИ 34, регистр 35 сдвига, элемент ИЛИ 36, инвертор 37, элемент И 38. .Блок 11 адресации (фиг.4) содержит элемент И 39, коммутатор 40, счетчик 41 столбцов, счетчик 42 строк, блок 43 запрета, счетчик 44 положений, триггер 45, коммутатор 46, счетчик 47 столбцов, элемент ИЛИ 48, счетчик 49 строк, сумматор 50, блок 51 запрета, сумматор 52, блок 53 запрета, элемент И 54, сумм торы 55 и 56. Измеритель 12 координат характер ной точки (фиг.5) содержит элемент ИЛИ 57, элемент И 58, регистр 59, сумматор 60, делитель 61, триггер 62, регистр 63, сумматор 64, делитель 65, счетчики 66 и 67. Блок 14 управления стробами (фиг 6) содержит реверсивные счетчики 68 и 69, блок 70 поразрядного сравнения, счетчики 71 и 72. Измеритель 17 вектора скорости (фиг.7) содержит сумматор 73, инвер тор 74, сумматор 75, инвертор 76. Синхронизатор 8 (фиг.8) содержит селектор 77, генератор 78 ударного возбуждения. Пульт 15 управления (фиг.9) содержит двухкоординатный потенциометр 79, преобразователи напряжения в частоту (ПНЧ) 80 и 81, кнопку 82 ждущий мультивибратор 83. Телевизионный координатор работа ет следующим образом. Телевизионную камеру 1 наводят таким образом, чтобЦ в ее поле обзора попадал участок траектории движущегося объекта, координаты которого в определенные моменты време ни должны быть измерены. Полный 6 /8 телевизионный сигнал, представляющий собой видеоинформацию о поле обзора, с телевизионной камеры 1 подают на ВКУ 9. Также на ВКУ 9 прДают видеосигнал Окно с формирователя 10 стробов, чтобы высветить на экране ВКУ 9 границы следящего строба. Кроме того, телевизионный сигнал подают с телевизионной камеры 1 на пороговый блок 2 и на синхронизатор 8. В пороговом.блоке 2, представляющем собой схему сравнения входного сигнала с предварительно выставленным в зависимости от отношения сигнал/шум пороговым уровнем, преобразуют .телевизионный аналоговый сигнал в бинарный (двухуровневый сигнал). В синхронизатор 8 (фиг.8) подают телевизионный сигнал, чтобы вьщелить из него строчные синхроимпульсы и селектором 77 сформировать импульсы дискретизации строки растрового разложения растровые элементы. Формируют последовательность растровых элементов с генератором 78 ударного возбуждения, фазируемого строчными синхроимпульсами. Строчные синхроимпульсы с выхода строчных синхроимпульсов синхронизатора 8 подают для синхронизации работы устройства на формирователь 10 стробов, на измеритель 12 координат характерной точки и на блок 14 управления стробами..Импульсы растровых элементов с выхода растровых элементов синхронизатора 8 подают на формирователь 10 стробов, на измеритель 12 координат характерной точки, на блок 14 управления стробами и на блок 11 адресации. Оператор размещается перед ВКУ 9 у пульта 15 управления. Пульт 15 управления (фиг.9) содержит двухкоординатный потенци.ометр 79, представляющий собой механизм двухкоординатного управления с двумя взаимно перпендикулярными потенциометрическими датчиками и с ручкой управления, угол и направление наклона котррой определяют величину поворота соответствующего датчика, ПНЧ 80 и 81, с псмощью которых преобразуют напряжения, снимаемые с соответствующих датчиков, в импульсные последовательности, частота которых пропорциональна эт№( напряжениям. Кроме того, двухкоординатный потенциометр 79 имеет два переключателя, которые связаны с механизмом крепления ручки и которые указывают каж дый в своей плоскости направление е наклона. На пульте 15 управления ра мещена также кнопка 82 автоматическ го сопровождения (АС), нажимая ко торую оператор запускает ждущий мул тивибратор 83, длительность выходно импульса которого равна периоду,кад ровой развертки. Таким образом, опера тор, обнаружив появление движущегося .объекта на экране ВКУ9, с помощью ру ки двухкоординатного потенциометра 79 пульта 15 управления перемещают по экрану Окно слежения так, чтоб выбранный объект оказался внутри Окна, и нажимает кнопку 82. В момент нажатия кнопки 82 на пульт t5 управления подают с пятого выход пульта 15 управления через элемент И 13 на стробирующий вход блока 16 памяти эталонного изображения сигнал разрешения записи эталона. Положение Окна слежения, области, соответствующей, эталонному изображению, и изображения объекта отобра жается на экране ВКУ 9. Соотношение площадей Окна и области эталонно изображения выбирают в формирователе 10 стробов из расчета максимальной скорости объекта так, чтоб он за время одного кадра телевизионной развёртки не вьшел из Окна слежения. Так как объект движется, то в следующем телевизионом кадре он займет новое положение. Принцип нахождения нового положе ния и координат объекта в Окне слежения заключается в следующем. Осуществляют сравнение эталонного изображения с изображением теку1цего кадра (текущее изображение), соответствующим Окну слежения, в калпой точке этой области. Сравнени видеосигналов отэталонного и текущего изображений путем определения их взаимно корреляционной функции в цифровом корреляторе 4 позволяет установить по максимуму этой функци новое местоположение объекта. Определив величину и направление смещения объекта, перемещают в этом направлении и на такую же виличину Окно слежения. В следующем кадре операции поиска нового положения объекта повторяются, а в качестве координат объекта считают координат максимума взаимно корреляционной функции на телевизионном растре. Таким образом, соотношение площадей Окна и эталонного изображения будет влиять на число поисковых положений эталонного изображения внутри Окна слежения. Если Окно слежения и область эталонного изображения квадратные и если размер стороны Окна слежения равен М, а размер стороны области эталонного изображения равен L, то число N всех возможных положений области эталонного изображения внутри Окна слежения определяется следующей формулой: N (М - L + 1)2. Четыре сигнала с пульта 15 управления подают на соответствующие входы блока 14 управления стробами, чтобы выработать сигнал управления положением стробов. Сигнал управления положением стробов, представляющий собой импульс, временное положение которого в каждом кадре определяет положение Окна слежения и область эталонного изображения на экране ВКУ 9, подают с управляющего выхода блока 14 управления стробами на управляющий вход формирователя 10 стробов. В формирователе 10стробов из импульса управления формируют сигналы стробирования (большой и малый стробы), с помощью которых осуществляют выборку только той части видеоинформации, какую используют в качестве эталонного изображения и текущего изображения, сигнал Окна слежения и импульс окончания большого строба. В данном случае области стробирования текущего изображения (большой строб) и эталонного -изображения (малый строб) имеют квадратную форму. Для формирования большого строба используют элементы ИЛИ 24 и 34, триггер 25, элемент И 26, счетчик 27 и регистр 33 сдвига. Испульс управления из блока 14 управления стробами подают на входы элемента ИЛИ 24 и регистра 33 сдвига, на второй вход которого подают в качестве тактовых импульсов строчные синхроимпульсы из синхронизатора 8. Управляющим импульсом, прошедшим через элемент ЛИ 24, перебрасывают триггер 25 в состояние, разрешающее прохождение растровых элементов, которые подают з синхронизатора 8 через элемент 26 на счетчик 27. Коэффициент счета счетчика 27 выбирают равным ширине большого строба в растровых элементах. Выходным импульсом счетчика 27 который подают на второй вход триггера 25, переводят его в исходное состояние. Регистр, 33 сдвига представляет собой многоотводную цифрову линию задержки, число рязрядов которой выбирают равной высоте большого строба. Так как регистр 33 сдвига таксируют строчными синхроимпульсами то входной импульс регистра 33 сдви га бу)цет появляться последовательно на его разрядах с задержкой на строк Сигналы с разрядов регистра 33 сдви объединяют на элементе ИЛИ 34 и через элемент ИЛИ 24 подают на первый вход триггера 25, разрешая работу счеТчиКа 27. Таким образом, выход триггера 25 используют в качестве выхода большого строба формиро вателя 10 стробов, так как длительность его импульсов равна ширине большого строба, а число их, задержанньпс друг относительно друга на строку, равно высоте этого строба. Импульс с второго выхода регистра 33 сдвига (выход последнего разряда представляющий собой импульс окончания большого строба, подают на управляющий вход блока t1 адресации. Формирование малого строба формирователя to стробов аналогично формированшо большого строба и включает ждущий мультивибратор 28, элементы ИЛИ 29 и 36, триггер 30, элемент И 31, счетчик 32 и регистр 35 сдвига Отличие лишь в том, что площадь мало го строба меньше, поэтсмму разрядность счетчика 32 и регистра 35 сдви га меньше разрядности соответствующего счетчика 27 и регистра 33 сдвига. Кроме того, область эталонного изображения, определяемая мальм стробом, начинается области большого строба, и эту задержку выставляют с псмснцью ждущего мультивибратора 28. Выход триггера 30 используют в качестве выхода малого строба формирователя 10 стробов. Инвертор 37 и элемент И 313 применяют для формирования сигнала Окно На первый вход элемента И 38 подают пройнвертированный сигнал малого строба а на второй вход - сигнал большого строба, на выходе элемента И 3 дсоторый является выходом сигнала Ок но формирователя 10 стробов, полу чают сигнал, которьй подают на вто6рой вход ВКУ 9, чтобы высветить Окно слежения. Итак, большой и малый стробы используют в устройстве для того, чтобы осуществить выборку сигналов текущего и эталонного изображения из полного телевизионного видеосигнала, и дать разрешение на запись этих сигналов в соответствующие блок 3 памяти текущего изображения и блок 16 памяти э.талонного изображения. Бинарный сигнал телевизионного изображения подают на информационные входы блоков 3 и 16 памяти текущего и эталонного изобра-,, жений. Запись сигналов в блок 3 памяти текущего изображения производят только с приходом большого строба на стробирующий вход блока 3 памяти текущего изображения с формирователя 10 стробов и в соответствии с адресом, который выставляют на первом и втором адресных входах блока 3 памяти текущего изображения. На первом адресном входе выставляют адрес столбца, а на втором адресном входе адрес строки матрицы блока 3 памяти текущего изображения. Коды адресов столбцов и строк для блоков 3 и 16 памяти текущего и эталонного изображений формируют в блоке 11 адресации. Запись сигналов в блок 16 памяти эталонного изображения производят с приходом на стробирующий вход блока 16 памяти э,талонного изображения малого строка из формирователя 10 стробов и-только тогда, когда открывают для малого строба элемент И 13 сигналом АС из пульта 15 управления. Режим считывания информации из блоков 3 и 16 памяти текущего и эталонного изображений в соответств с адресами на их адресных входах начинают по окончании большого строба. Процесс вьщачи адресных кодов из блока 11 адресации на блоки 3 и 16 памяти текущего и эталонного изображений выполняют таким образом, чтобы осуществить сканирование эталонным изображением в требуемой зоне поиска текущего изобг ражения. Эти адресные коды формируют в блоке 11 адресации. Элемент И 39, коммутатор 40, счетчик 41 столбцов, счетчик 42 строк, блок 43 запрета и счетчик 44 положений являются датчиком адресных кодов блока 16 памяти эталонного изображения, а вторые выходы счётчика 41 столбцов и
13
счетнйка 42 строк ягзляются соответственно третьим и четвертым выходам блока 11 адресации. Коммутатор А6, счетчик 47 столбцов, элемент ИЛИ 48 счетчик 49 строк, блоки 51 и 53 запрета, сумматоры 50 и 52 и элемент И 54 являются датчиком адресных кодов блока 3 памяти текущего изображения, а выходы сумматоров 52 и 50 являются соотвеФственно первым и вторьм выходами блока 11 адресации. С помощью триггера 45, коммутаторов 40 и 46, блоков 51, 53 и 43 запрет осуществляют переход от режима записи к режиму считывания блоков 3 и 16 памяти текущего эталонного изображения, соответственно когда на второй вход триггера 45, являющегося управляющим входом блока 11 адресации, подают импульс окончания большого строба с формирователя 10 стробов. .
Формирование адресных кодов для блока 16 памяти эталонного изображения в режиме записи происходит следующим образом. На первый вход элемента И 39 подают малый строб и разрешают прохождение растровых элементов через коммутатор 40 на счетный вход счетчика 41 столбцов,j импульсы последнего разряда которого являются счетными для счетчика 42 строк. Разрядность этих двоичных последовательных счетчиков равна соответственно числу столбцов и строк в матрицах эталонного изображения, С разрядов счетчика 41 столбцов снимают параллельный код и подают на первый адресный вход блока 16 памяти эталонного изображения. С разрядов счетчика 42 строк снимают параллельный код адреса строки и подают .на второй адресный вход блока 16 памяти эталонного изображения. На выходе триггера 45 в этом режиме устанавливают потенциал, с помощью которого запрещают прохождение сигналов через блоки 43, 51 и 53 запрета, коммутаторы 40 и 46 устанавливают в состояние пропускания растровых элементов только с элементов И 39 и 54 соответственно. Формирование адресных кодов блока 3 памяти текущего изображения в режиме записи выполняют почти таким же образом, как и в предьщущем случае. На второй вход элемента И 54 подают большой строб и разрешают тем самым прохождение
0995614
ровых элементов через коммутатор 46 на счетный вход счетчика 47 столбцов, выходные импульсы последнего разряда которого являются счетньми импульсами счетчика 49 строк, которые выполнены так же, как и ,счетчик 41 столбцов и счетчик 42 строк, только разрядность их выше и равна соответственно числу столбцов и строк мат7
,Q рицы текущего изображения, соответствующей области Окна слежения. Параллельный код с разрядов счетчика 47 столбцов суммируют в сумматоре 52 с нулями, так как в этом режиме
., с помощью блока 51 запрета блокируют подачу каких-либо сигналов на первый вход сумматора 52 и выдают адресный код столбцов с выхода сумматора 52 на первый адресньй вход
jQ блока 3 памяти текущего изображения. Таким же образом с выхода сумматора 50 выдают адресный код строк на второй адресный вход блока 3 памяти текущего изображения.
Формирование адресных кодов в режиме считывания информации из блоков 3 и 16 памяти текущего эталонного изображения соответственно происходит следующим образом. С окончанием большого строба на второй вход триггера 45 подают импульс окончания большого строба с формирователя 10 стробов и.перебрасывают его в состояние, открывающее блоки 43, 51 и 53 запрета и переключающие комму5 таторы 40 и 46. Одновременно счетчики 47 столбцов и 49 строк устанавливают с помощью импульса окончания большого строба в состояния, в которых адресные коды на единицу меньше, чем адресные коды центрального положения матрицы эталона в матрице текущего изображения. Таким образом, складывая адресные коды счетчиков 41 столбцов и 49 строк на сумматорах 52 и 50, получают на их выходах адресные коды блока 3 текущего изображения, при которых считывается сигнальная информация текущего изображения, равная по объему эталонному,
0 но смещенная относительно центрального положения на один растровый элемент влево и вверх. По окончании счета счетчиком 42 строк импульс с его последнего разряда подают через комS мутатор 46 на счетчик 47 столбцов и изменяют его состояние на едини- : цу.Этим же импульсом через блок 43 запрета запускают счетчик 44 положений. 15Таким обрлзом,- произошло смещени области считывания на единицу вправ После третьего импульса на втором входе счетчика 44 положений, которы представляет собой трехкаскадный счетчик, каждый каскад которого име ет коэффициент деления 3, получают и пульс, с помощью которого возвращают счетчик 47 столбцов в исходное состояние, а через Элемент ИЛИ 48 переводят счетчик 49 строк в состояние на единицу больше. Теперь область считывания находится на един цу левее центральной области. Далее продолжается смещение области считывания два раза на единицу вправо, затем возврат в исходное левое поло жение, но на единицу ниже, и опять три раза по единице вправо. После девятого импульса на входе счетчика 44 положений, имеющего коэффициент пересчета 9, на его выходе получают импульс, с помощью которого обнуляют счетчики 47 столбцов и 49 строк и возвращают триггер 45 в состояние соответствующее режиму записи. Таким образом, информация, которую сч тывают из блока 3 памяти текущего изображения, соответствует девяти положениям поиска максимума функции взаимной корреляции. В каждом из этих положений осуществляют сравнение с эталонным изображением, которое каждый раз считывает из блока 16. памяти эталонного изображения в цифровом корреляторе 4. На один вхо элемента ИСКЛЮЧАЩЕЕ ИЛИ 22 подак)т сигналы с блока 3 памяти текущего изображения, а на другой - с блока 16 памяти эталонного изображения. На выходе элемента ИСКЛЮЧАКИЦЕЕ ИЛИ 22 получают импульсы только в то случае, когда на его входах сигналы совпадают. С помощью счетчика 23 совпадений подсчитывают число выходных импульсов элемента -ИСКЛЮЧАЮЩЕЕ ИЛИ 22, тем самым устанавливая меру совпадения сравниваемых изобра жений. В качестве этой меры выбираю код счетчика 23 совпадений, представляющий собой двоичный последовательный счетчик. Этот код подают на регистр 5 хранения, в котором его запоминают на время сравнения изображений в одном положении, и на компараторе 6. Таким образом, на компараторе 6 выполняют операцию сравнения кодов текущего и предыдущего подсчетов. Если код.текущего 616 числа больше кода предьдущего числа, то на втором выходе компаратора 6 получают сигнал, который подают на второй вход регистра 5 хранения с целью разрешения записи в него большего кода. Одновременно с первого выхода компаратора 6 на вход регистра 7 фиксации координат максимума вьщают сигнал, с помощью которого разрешают запись координат наилучшего совмещения относительно Окна слежения. Эти координаты формируют в блоке 11 адресации и вьщают на первый и второй входы регистра 7 фиксации координат максимума. В блоке 11 адресации (фиг.4) эти координаты получают из адресных кодов счетчика . 47 столбцов и счетчика 49 строк путем сложения в сумматорах 55 и 56 этих кодов с постоянными числами, приводящими их к центру Окна слежения. Сумматоры 52,50,55 и 56 имеют разрядность, равную разрядности счетчика 47 столбцов и счетчика 49 строк. Итак, по окончании девяти циклов сравнения в регистре 7 фиксации координат максимума будут записаны координаты максимума функции взаимной корреляции относительно Окна слежения. Эти координаты используют далее для уточнения координат, определяемых грубым алгоритмом. Для грубого определения координат объекта в каждом кадре используют измеритель 12 координат характерной точки В -качестве характерной Точки изображения объекта принимают его геометрический центр тяжести, хотя не исключен выбор и другой точки в качестве характерной (например, крайней верхней). Смысл оценки координат характерной точки заключается в следующем. Биларно-квантованный сигнал с выхода порогового блока 2 дискретизируют по времени с помощью растровых элементов и каждому единичному импульсу изображения объекта присваивают соответствующие координаты X и У относительно телевизионного растра. Затем суммируют координаты каждого импульса объекта отдельно по X и У, делят на число импульсов, приходящихся на объект, и получают координаты геометрического центра тяжести объекта. Сигнал с выхода порогового блока 2 подают на второй вход элемента И 58, на первый и третий входы которого подают соответственно большой строб и растровые элементы. На элементе И 58 выполняют одновременно две операции: операцию дискретизирования входного сигнала и oneрацию стробированря изображения объекта с целью уменьшения влияния сигналов от псмех. Рассмотрим сначала канал X измерителя 12 координат характерной точк содержащий регистр 59 сумматор 60, делитель 61 и счетчик 66. На второй вход регистра 59, представляющий собой регистр с параллельными записью и считыванием информации, подают текущий код координаты вдоль строки телевизионной развертди из блока 14 управления стробами. По команде импульса объекта, которую заводят на первый вход регистра 59, соответствующую координату записывают в регистр 59 и суммируют в сумматоре 60 с предьвдущей Сумматор 60 представляет собой накапливаювщй сумматор. Параллельно импульсы объекта подают на счетчик 66, представляю1ций двоичный последовательньй счетчик, на котором выполняют подсчет импульсов, приходящихся на изображение объекта Суммарный код координаты в качестве делимого с выхода сумматора 60 подаст на первый вход делителя 61, а код числа импульсов в-качестве делителя с выхода счетчика 66 подают на второй вход делителя 61. На выходе делителя 6t получают код координаты X характерной точки относи- . тельно телевизионного растра. Аналогичным образом получают код координаты У в канале У измерителя 12 координат характерной точки, вклю чающем регистр68, сумматор 64, делитель 65, триггер 62 и счетчик 67. Разница заключается лишь.в том, что подсчитывают число строк, которые занимает изображение объекта на телевизионном экране, и в качестве координат У водают координату средней строки. Для этого на второй вход рЕегистра 63 подают теку1Щ}й код координаты по кадру с блока 14 управления стробами, а на второй вход триггера 62 - строчные синхроимпульсы с синхронизатора 8. Координаты X и У с соответствукйцих выходов измерителя 12 координат характерной точки подают соответственно на первый и второй входы измерителя 17 вектора скорости, на третий и четвертый входы которого подают соответственнно координаты X и У предыдущего кадра с выходов четвертого и второго сумматоров 19 и 21. Принцип вычисления вектора скорости по каждой из координат одинаков и заключается в вычислении разности между текущей и предыдущей координатами объекта с учетом знака разности в первом разряде кода вектора скорости. В канале координат X измерителя 17 вектора скорости участвуют сумматор 73 и инвертор 74. Код координаты X предьщущего кадра преобразуют в обратный код в инверторе 74 и подают на второй вход сз мматора 73, на первый вход которого подают код координаты текущего кадра. На выходе сумматора 73, в котором в результате выполняют вычитание текущего и предыдущего кодов; получают код вектора скорости в направлении оси X. Точно таким же образом производят вычисление кода вектора скорости в направлении оси У, используя сумматор 75 и инвертор 76. В операции формирования координат предыцущего кадра с введения поправок, полученных при корреляционной обработке, участвуют, блок 14 управления стробами и сумматоры 18-21. В качестве датчиков координат Окна слежения в ручном режиме используют реверсивные счетчики 68 и 69, а в качестве датчиков текущих координат растра (развертываопщй фзгнкций) по строке и по кадру применяют счетчики 71 и 72. С пульта 15 управления подают на блок 14 управления стробами четыре группы сигналов управления реверсивными счетчиками 68 и 69. На первые входы реверсивных счетчиков 68 и 69 подают последовательности счетных импульсов, а на вторые входы - сигнал управления направлением счета. Следовательно, в зависимости от того, куда оператору необходимо переместить Окно слежения, туда он и наклоняет ручку двухкоординатного потенциометра 79, тем самым уменьшая или увеличивая коды координат на разрядах реверсивных счетчиков 68 и 69. На счгетный вход счетчика 71 постоянно подают растровые элементы с синхронизатора 8, так что на его выходе получают коды резвертывающей функции по строке. На счетный вход счетчика 72 подают с синхронизатора 8 строчные синхроимпульсы, а на выходе его получают коды развертывающей функци по кадру. Эти коды со счетчиков 71 и 72 подают на третий и четвертый входы блока 70 поразрядного сравнения и на второй и .третий входы измерителя 12 координат характерной точки. В блоке 70 поразрядного срав нения сравнивают коды счетчиков 71 72 с кодами, которые подают на первый, и второй входы этого же блока 70, В качестве датчика кода координаты Окна слежения по строке в ручном режиме используют реверсивный счетчик 68, а в качестве кода координаты Окна слежения по кадру реверсивный счетчик 69. С целью изменения этих координат в автоматическс режиме работы выходные коды реверсивных счетчиков 68 и 69 подаю на первые входы первого и третьего сумматоров 18 и 20, выходные коды которых подают соответственно на первый и второй входы блока 70 поразрядного сравнения блока 14 управления стробами. Таким образом, в момент равенства кодов на выходе блока 70 поразрядного сравнения получают импульб, положение которого характеризует положение слеж ния. Процесс изменения координат Окна слежения при автоматическом слежении и процесс введения поправки при корреляционном уточнении координат происходит следую цим образом. Изменение координаты X Окна слежения осуществляют с помощью тре тьего сз мматора 20 путем слежения кода координаты X, который подают н его первый вход с первого выхода блока 14 управления стробами, с кодом вектора скорости по строке, который подают на второй его вход с второго выхода измерителя 17 вектора скорости. Итоговое значение координаты X на выходе третьего сумматора 20 укажет новое местоположение Окна слежения на экране ВКУ 9 Аналогично производят изменение координаты -У на первом сумматоре 620 18 в соответствии с измеренным значением вектора скорости п.о кадру (по координате У). Дпя уточнения координат, полученных с помощью грубого оценивания, используют второй и четвертый сумматоры 19 и 21, четвертый сумматор 21 используют для уточнения координаты X. Для этого с второго выхода регистра 7 фиксации координат максимума подают на второй вход четвертого сумматора 21 координату максимума функции взаимной корреляции по строке по отношению к Окну слежения. На первый вход четвертого сумматора 21 подают с выхода третьего сумматора 20 координату X Окна слежения, полученную с помощью прогноза по вектору скорости. Итак, на выходе четвертого сумматора 21 получают уточненную координату X Окна слежения, которую используют для формирования следующего прогноза по вектору скорости по X и в качестве выходного значения координаты X объекта по отношению к экрану ВКУ 9. Уточнение координаты У производят аналогичным образом, но с использованием первого и второго сумматоров 18 и 19, причем выходной код второго сумматора 19 является выходным значением координаты У объекта на экране ВКУ 9 телевизионного координатора. Таким образом, включение новых лементов выгодно отличает предлагаеое устройство от указанного прототиа, позволяет работать в условиях изкого () отношения сигнал/ ум и при сохранении точности измеения значительно повысить (более, ем в 2 раза) быстродействие устройтва за счет уменьшения количества ычислительных операций. Увеличение ыстродействия в свою очередь уменьит вероятность срыва слежения и отери необходимой измерительной нформации, дает возможность усложить алгоритмы обработки с целью лучшения параметров устройства или ополнить новыми за счет появившегося езерва времени.
СблЗ
1
IZ
т
CSJJ.16 С9л.Щ CM
,6
3
Фиг.1 CffA.8
Фиг.З Hafffl.lUZJJ На6л.9
с Ул13
I
39
М
Фиг.6
7J
/
n
ЬС$л(та ЬСд/юка 2
HaSMKll
Ha IfjioK //
HaSjtOKZO
T-
75
Фиг.7
.8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для слежения за точечным объектом | 1976 |
|
SU559458A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
