(54 ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА Изобретение относится к измеритепыю технике и может быть использовано, например, для измерения скорости цвиження транспортных средств. Известно устройство для измерения скорости движения автотранспорта, состоящее из телевизионной камеры, которая соединеня через усилитель с экраном видеоконтрольного устройства. На экране укреплены торцы двух световодов, другие концы световодов соединены с блоком измерения временных интервалов, выдающим результат на цифровой индикатор Недостатками известного устройства являются низкая помехоустойчивость (рекомендуют окрашивать j -iacTOK дороги белой краской) и низкая точность. Невысокая точность изморения скорости вызвана конечным размером электронного луча вииеоконтрольяого блока, конечным ди метром световода, большой длительностью фронта видеоимпульса, поступающего на вход блока измрррния временного интервала, (Б описанном устройстве осуществляется два лреобразования свет-видеосигнал и одно преобразование видеосигнал-свет) . Наиболее близким к предлагаемому является устройство, принятое за прототип и реализующее известный способ измерения скорости движения, содержащее приемник изображения, блок памяти кодов, блок сравнения кодов, преобразователь временной интервал-скорость и синхронизатор, при этом первый, второй, третий и четвертый выходы синхронизатора подключены соответственно к входу приемника изображения, к первому входу блока памяти кодов, к первому входу блока сравнегдая кодов и к первому входу преобразователя временной интервал-скорость. Выход приемника изображения связан со вторым входом блока сравнения кодов через блок памяти кодов, а с третьим входом блока сравнения кодов - непосредственно. Выход блока сравнения подключен ко второму входу преобразователя временной интервал-скорость. В приемник
iao6pa KetfflH входят две группы датчиковя асположенкых на известном расстоянии руг от apyrso я схема квантования, пое- бра-зую1иэя сггучайные сигналы с датчиков двоичный код В состав синхронизатора ходит упражняемый генератор тактовых -змпуяьсов j 2l
Недостатком прототипа является его низкая помехоусто15чивость,| что не позволяет использовать его для измерения скорости движения объекта, перемещакяцегося в условн55х неравномбрного фона. Такой случай имеет, например, место, когда необходимо измерить скорость транспортного средства на заранее не известных участках дороги.
Целью изобретения является увеличе нае помехоустойчивости.
Поставленная цепь достигается тем, то в предлагаемое устройство введены бпок памяти видеосигнала и блок сравне- кия видеосигнапа, при этом выход приемнйгса изображения связан через блок памяти вЕдеосягыапов н бпок сравнения видеосигналов со входом синхронизатора. Со BTopbJNS Бяойом блокв памяти кодов и с третьим BKosoM блока сравнения кодов а БТороЗ блока сравненая видеосиг- гтБГов поцпяоЗ-ея Е выходу приемника изображения папбсредственно.
Таксе устройство измеряет среднюю dKOpccTb р.з гкеШ Я объегста По сравнению с известными предлагаемое устройство обпадает большей помехоустойчивостью Алгоритмом работы устройства пред7 смотр8но перемещение объекта по неоднородному пото, освещенность отдельвьпс участков которого может медленно меняться.
Это достигается тем, что в предлагаемом устройстве в процессе измерения не участвует информация от неподвижных или медленно движущихся объектов. Селекция подвижных объектов осуществляется блоком сравнения видеосигналов, на вход которого подаются сигналы с блока памяти видеосигналов приемника изображения.
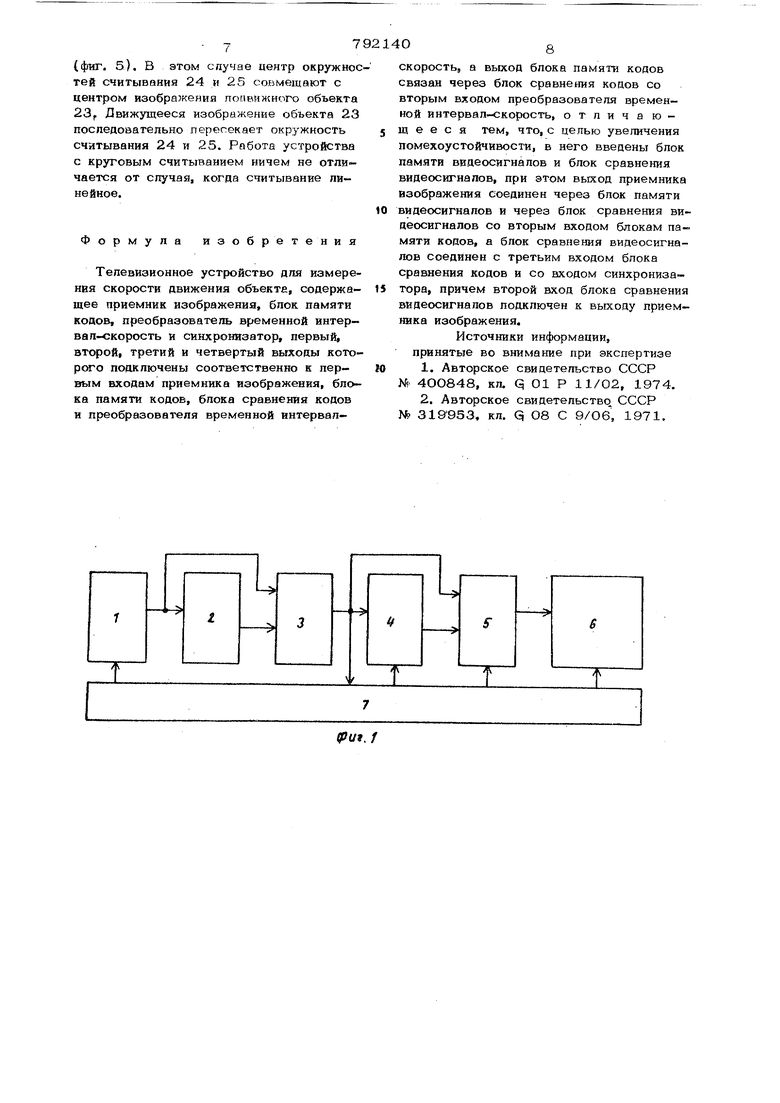
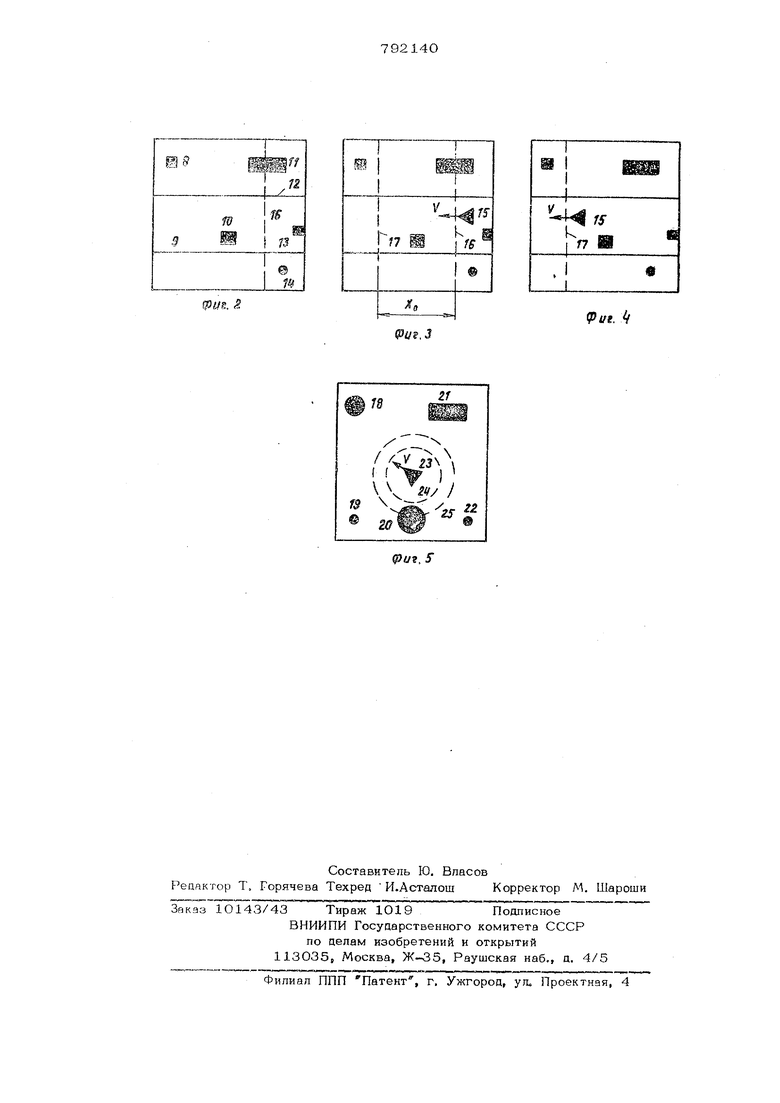
На фиг. 1 приведена блок-схема описываемого устройства; на фиг, 2-4 - возможный вариант расположения изображений объектов на входе устройства в различные моменты времени,
Тепевизионное устройство для измерения скорости движения объекта содержит приемник изображения 1, блок памяти ви- деосигнплов 2, блок сравнения видеосиг налов 3, блок памяти кодов 4, блок сравнения кодов 5, преобразователь временной интервал-скорость 6 и синхронизатор 7, Первый, второй, третий и четвертый выходы синхронизатора 7 подключены
соответственно к первым входам приемника изображения 1, блока памяти ко дов 4, блока сравнения кодов 5 преобразователя временной интервал-скорость 6. Выход блока памяти кодов 4 связан че0 рез блок сравнения кодов 5 со вторым входом преобразователя временной интервал-скорость 6. Выход приемника изображения 1 соединен через блок памяти видеосигналов 2 и через блок сравнения
5 видеосигналов 3 со входом синхронизатора 7, со вторым входом блока памяти кодов 4 и с третьим входом блока сравнения кодов 5. Второй вход блока сравнения видеосигналов 3 подключен к вы0 ходу приемника изображения непосредственно.
В качестве приемника изображения 1 используют передающую телевизионную трубку. Блоки памяти 2 и 4 выполнены
5 на базе запоминающих ЭЛТ. Блок сравнения видеосигналов 3 содержит вычитающий усилитель, пороговую схему и схему квантования. Блок сравнения кодов 5 состоит из двухвходового логичес-. кого элемента И, сумматора и пороговой схемы. Преобразователь временной интер вал-скорость 6 содержит измеритель временного интервала и решающую схему, выполняющую операции умножения и деления. В состав синхронизатора 7 входит управляемый генератор тактовых импульсов.
На фиг. 2-4 цифрами обозначены; 8-14 - неподвижные изображения; 13 -
0 движущиеся со скоростью V изображение объекта; 16 и 17 - линии считывания: Хо расстояние между линиями считывания.
На фиг. 5 представлен возможный
вариант расположения неподвижных изображений 18 - 22; движущегося со скоростью V изображения 23 и линий {окpyжнocfeй) считывания 24 и 25.
Устройство работает следующим образом.
На фотослой телевизионной трубки, которая входит в состав приемника изобра- жения, проекцируется изображение под, вижного объекта, скорость которого необходимо измерить, и изображения неподвижных объектов, например рельеф местности. Трубка работает в однострочном режиме с относительно высокой частотой развертки, причем направление развертки перпендикулярно направленгоо церемещёния движущегося, объекта. В момент пересечения движущимся изображением линии развертки осуществляется запоминание вндеосигнапа, а пиния развертки перемещается по ходу движения на вепичину XQ Через некото- рое время движущееся изображение пе- ресечет вторую линию развертки.Скорость перемещения определяется по времени, за которое подвижный объект переместится от одной линии развертки до другой и по расстоянию Х0 между этими линиями. С цепью увеличения помехоустойчивости при обработке видеосигналов информация от неподвижных объектов устраняется. Пусть на вход приемника изображения 1 проецируется только неподвижные объек ты 8-14. Линия считывания 16 пересекае изображения 9, 11 и 12. Видеосигнал от этих изображений поступает в блок памяти 2, где занимается на время, равное длительности строки -ij;. Через промежуток времени осуществляется новое считывание информации. Видеосигнал с выхода приемника изображения 1 поступает в блок памяти 2 и в блок сравнения 3. На другой вход блока сравнения 3 поступает задержанный видеосигнал с блока памяти 2. В блоке сравнения 3 поступающие на его входы видеосигналы вычитаются, разностный сигнал сравнивается с пороговой величиной и путем квантования преобразуется в код. Так как за промежуток време ни t/o в поле зрения приемника изображения 1 не произошло изменений, то разностный сигнал меньше пороговой величины и на выходе блока сравнения 3 сигнала нет. Описанный цикл работы повторяется до тех пор, пока линия считьгояния не пересечет подвижный объект. Этот момент показан на фигч 3, где подвижный объект 15, скорость движения изображения которого равна V пересек линию считывания 16. При этом разностный сигнап в блоке сравнения 3, превышая пороговую величину квантуется, а полученный код поступает на вход блока памяти 4, где осуществляется его запись, и на вход син хронизатора 7, В синхронизаторе 7 формируется управляющий сигнал, который поступает на вход приемника изображения 1, на первый вход блока памяти 4, пв первый вход блока сравнения 6 и на первый вход преобразоватепя временной интервал-скорость 6. В результате этого пиния считывания 16 приемнике изображения 1 перемещается по ходу авиженяя объекта на вепичину (фиг„ З), блок памяп5 4 переведи7ся в режим считыва- ния, в блоке сравнет-:я 5 периодически в момент считывания на время включается сумматор, а в преобразователе временной интервап-скорость 6 начинается измерение промежутка времени fit за который изображение подвижного объекта 15 переместится от линии считывания 16 до линии считывания 17. На второй вход блока сравнет1я 5 периодически поступает код с выхода блока памяти 4, а на . третий вход этого блока с таким же периодом поступает гсод с выхода блока орав- нения 3 На блоке сравнения 5 осуществляется логическое умножение поступак щих кодов, резуяьтатируюций сигнал суммируется в течение времени считывания ,c сумматорный сигнал сравнивается с порогом. Описанный выше процесс считывания изображения, формирования, запоминания и сравнения кодов периодически повторяется, но до момента времени bj + At выходной сигнал с блока сравнения 5 равен нулю. В момент Ь + brt изображение объекта 15 пересечет линяю развертки 17 (фиг. 4). разностный сигнал в блоке сравнения 3 превысит пороговую величину, а код иа входе блока сравнения 3 совпадает с кодом, поступающим с бло ка памяти 5. Таким образом, на входы блока сравнения 5 в течение времени считывания tc поступают одинаковые коды. Суммарный снгнпл превышает пороговую величину и поступает в преобразователь временной интервал-скорость 6, вызывая прекращение формирования временного интервала Jb-t В преобразователе временной интервал-скорость б величина временного интервала Li/ преобразует™ ся в величину, равную скорости движения объекта. (Расстояние до объекта известно и заранее вводится в преобразователь 6}. Пикл измерения закончился, все блоки по команде из синхронипереводятся в исходное сое- затора ТОЯНИЕ. При описанном выше линейном считывании изображения измеряется скорость объекта, движущегося перпендикулярно линии считывания. Еспи линия считывания будет не линейной, s круговой, то возможно измерение скорости движения объекта независимо от направления движе1-шя (фиг. 5). В этом случае центр окружнос тей считывания 24 и 25 совмещают с центром изобра}кения попвижного объекта 23f Движущееся изображение объекта 23 последовательно перепекает окружность считывания 24 и 25. Робота устройства с круговым считыванием ничем не отличается от спучая, когда считывание линейное. Формула изобретения Тепевиаионное устройство для измерения скорости движения объекте, содержащее приемник изображения, бпок памяти кодов, преобразователь временной интервал-скорость и синхронизатор, первый, второй, третий и четвертый выходы котор и о подключены соответственно к первым входам приемника изображения, блока памяти кодов, блока сравнения кодов и преобразователя временной интервалскорость, а выход блока памяти кодов связан через блок сравнения кодов со вторым входом преобразователя временной интервал-скорость, отлича ющ е е с я тем, что, с цепью увеличения помехоустойчивости, в него введены блок памяти видеосигналов и блок сравнения видеосигналов, при этом выход приемника изображения соединен через блок памяти видеосигналов и через блок сравнения видеосигналов со вторым входом блокам памяти кодов, а блок сравнения видеосигналов соединен с третьим входом блока сравнения кодов и со входом синхронизатора, причем второй вход блока сравнения видеосигналов подключен к выходу приемника изображения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 4ОО848, кл. q О1 Р 11/О2, 1974. 2. Авторское свидетельство. СССР № 31&953, кл. q О8 С 9/О6, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скорости движения объектов и их типов | 1984 |
|
SU1193716A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| Селектор сигналов движущихся объектов | 1975 |
|
SU555357A1 |
| Устройство для воспроизведения осциллограмм видеосигналов | 1981 |
|
SU987852A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006941C1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| Оптоэлектронный автосортировщик | 1983 |
|
SU1106554A1 |
ipat.f
IS
w
© n
I-
фа.. Ё
Tf
k
e
л
tie,
