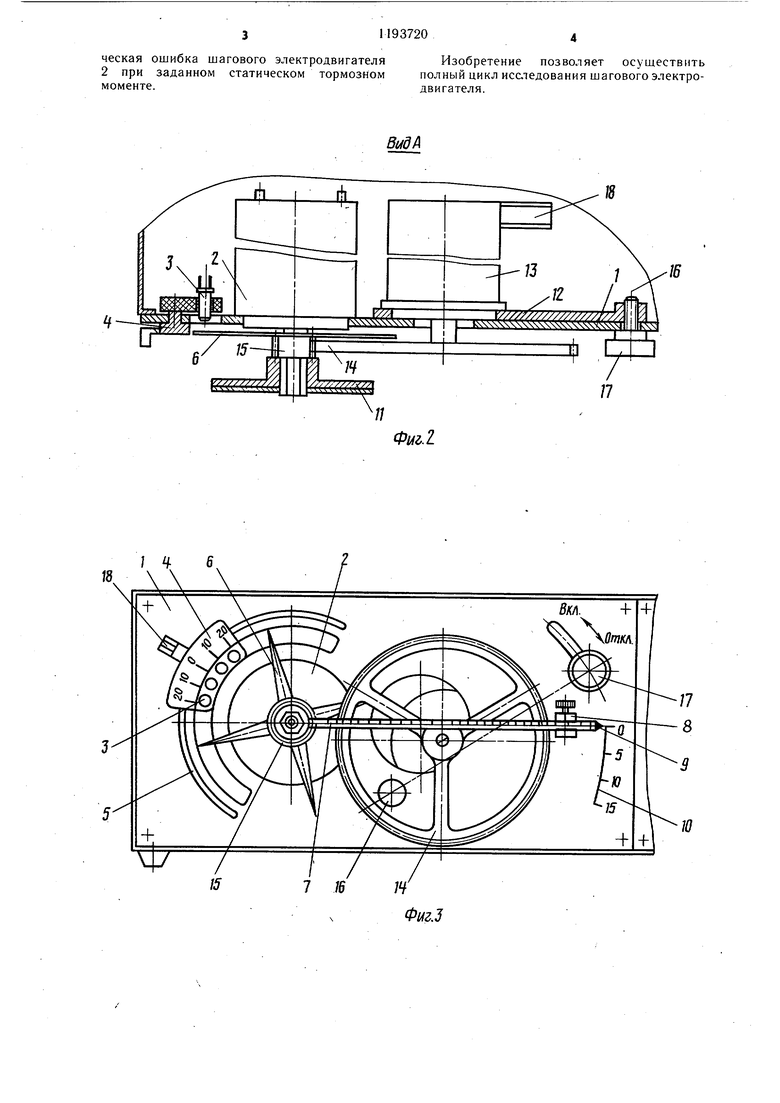
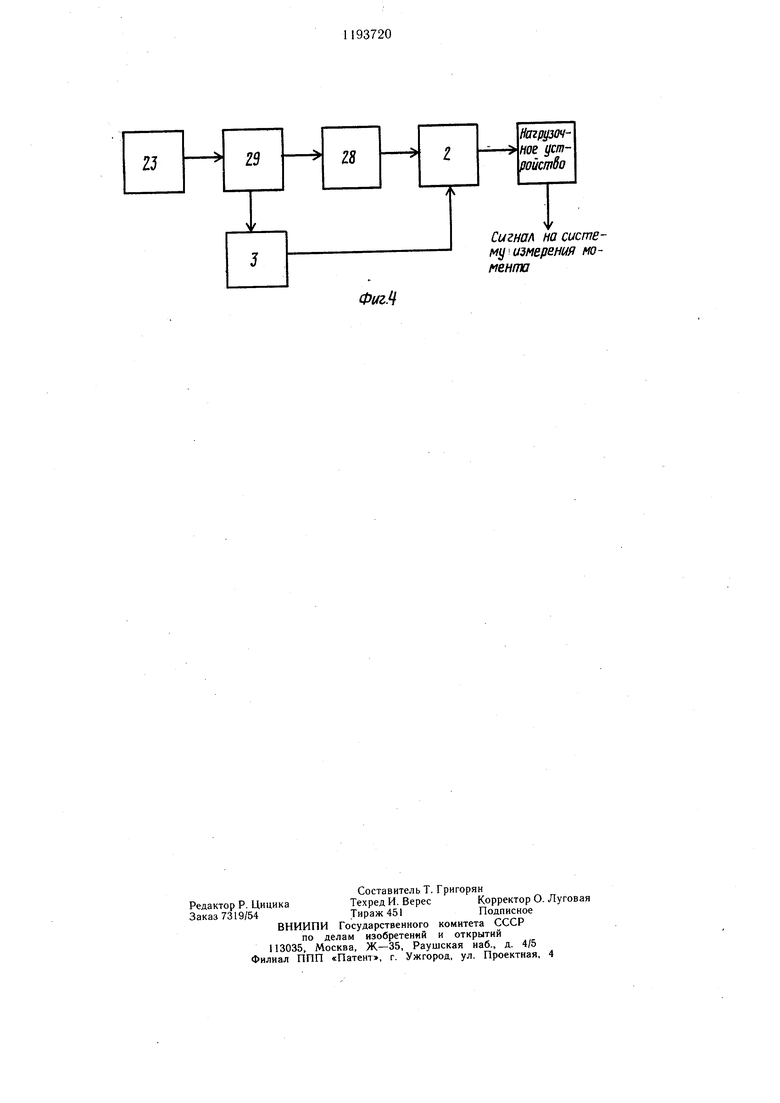
Изобретение относится к учебно-лабораторному оборудованию, в частности к установкам для изучения и исследования шаговых электродвигателей в учебном процессе в высших и средних учебных заведениях. Целью изобретения является увеличение количества исследуемых характеристик. На фиг. 1 изображена лабораторная установка для исследования шагового электродвигателя; на фиг; 2 - вид А на фиг. 1, на фиг. 3 - установка в момент регистрации статического синхрониз.ирующего момента; на фиг. 4 - условная схема системы управления. Лабораторная установка для исследования шагового электродвигателя в учебном процессе содержит установленный на основании 1 шаговый электродвигатель 2, нагрузочное устройство и систему управления. Лабораторная установка для исследования шагового электродвигателя имеет также регистратор динамической угловой ошибки, состояший из расположенного на основании 1стробоскопа 3 (который может быть выполнен в виде группы импульсных ламп), угломерной шкалы 4, установленной на основании 1 с возможностью перемеш,ения по дуге 5 относительно вала шагового электродвигателя 2, и стрелочного указателя 6, выполненного, например, в виде четырехлучевой звезды и закрепленного на валу шагового электродвигателя 2 (фнг. 1), и регистратор статического синхронизируюш,его момента (фиг. 3), состояший из консольно закрепляемого на валу электродвигателя рычага 7 с установленным с возможностью перемешения по нему грузом 8 и со стрелочным указателем 9 на конце и закрепленной на основании 1 шкалы 10 угла поворота. Нагрузочное устройство включает в себя съемные диски 11, устанавливаемые на вал электродвигателя, поворотную пластину 12, расположенную на основании 1, и порошковую муфту 13, установленную на поворотной пластине 12 и кинематически связанную с валом электродвигателя 2 (фиг. 2). Кинематическая связь порошковой муфты 13 с валом шагового электродвигателя 2осуществляется благодаря зубчатому зацеплению большой шестерни 14, закрепленной на валу порошковой муфты 13, с малой шестерней 15, закрепленной на валу шагового электродвигателя 2. Поворотная пластина 12 может поворачиваться относительно оси 16, что позволяет вывести шестерни 14 и 15 из зацепления. Для фиксации шестерен 14 и 15 в заданном положении служит винт 17. Нагрузочное устройство имеет тензометрическую балку 18, выполняющую роль датчика для определения момента (фиг. 2). Система управления лабораторной установки содержит на установленной на основаь ии 1 панели 19 ручного управления (фиг. 1), амперметр 20, сигнальную лампу 1 02 21 включения, тумблер 22 включения электродвигателя (в стоповый режим), регулятор 23 частоты, тумблер 24 включения муфты 13, кнопку 25 включения стробоскопа, кнопку 26 включения непрерывного управления, кнопку 27 одиночного шага. Система управления (фиг.4) включает также узел управления режимами, содержаший блок 28 коммутации и блок 29 регулирования частоты коммутации. Исследование шагового электродвигателя проводится следуюшим образом. Характеристика статического синхронизируюш.его момента определяется с помош,ью рычага 7, установленного на валу шагового электродвигателя 2. При этом необходимо отключить нагрузочное устройство, т. е. вывести из зацепления шестерни 14 и 15, и включить стоповый режим шагового электродвигателя 2 тумблером 22. Перемещением груза 8 по рычагу 7 последовательно задается момент, приложенный к валу шагового электродвигателя 2. По шкале 10 определяется угол поворота вала для заданного значения момента. Характеристика приемистости шагового электродвигателя определяется при отключенном нагрузочном устройстве. Тумблером 22 и кнопкой 26 включают обмотки шагового электродвигателя 2 и плавным поворотом ручки регулятора 23 частоты задают частоту коммутации, при котором осуществляется запуск шагового электродвнгателя 2. На вал шагового электродвигателя 2 последовательно устанавливаются съемные диски 11 и для каждого диска в указанной последовательности фиксируется частота коммутации. Определение угла отработки в стартстоповом режиме производится при включенном тумблере 22 нажатием кнопки 27 одиночного шага. Погрешность отработки фиксируется при помоши стрелочного указателя 6 и угломерной шкалы 4. Определение динамической ошибки в режиме синхронного вращения производится при включенном нагрузочном устройстве (т.е. при сцеплении шестерен 14 и 15). Тумблером 24 включения муфты 13 и кнопкой 26 непрерывного управления шаговый электродвигатель приводится во вращение. Кнопкой 25 включения стробоскопа 3 включают группу импульсных ламп. Перед снятием характеристики угломерная шкала 4 устанавливается на О против острия стрелочного указателя 6. Регулятором 23 частоты коммутации шагового электродвигателя 2 устанавливается требуемая частота вращения. Изменением тока возбуждения порошковой муфты 13 нагрузочного устройства задается статический момент нагрузки на валу шагового электродвигателя 2. С помощью стробоскопического эффекта по угломерной шкале 4 определяется динами311937204
ческая ошибка шагового электродвигателяИзобретение позволяет осуществить
2 при заданном статическом тормозномполный цикл исследования шагового электромоменте,двигателя.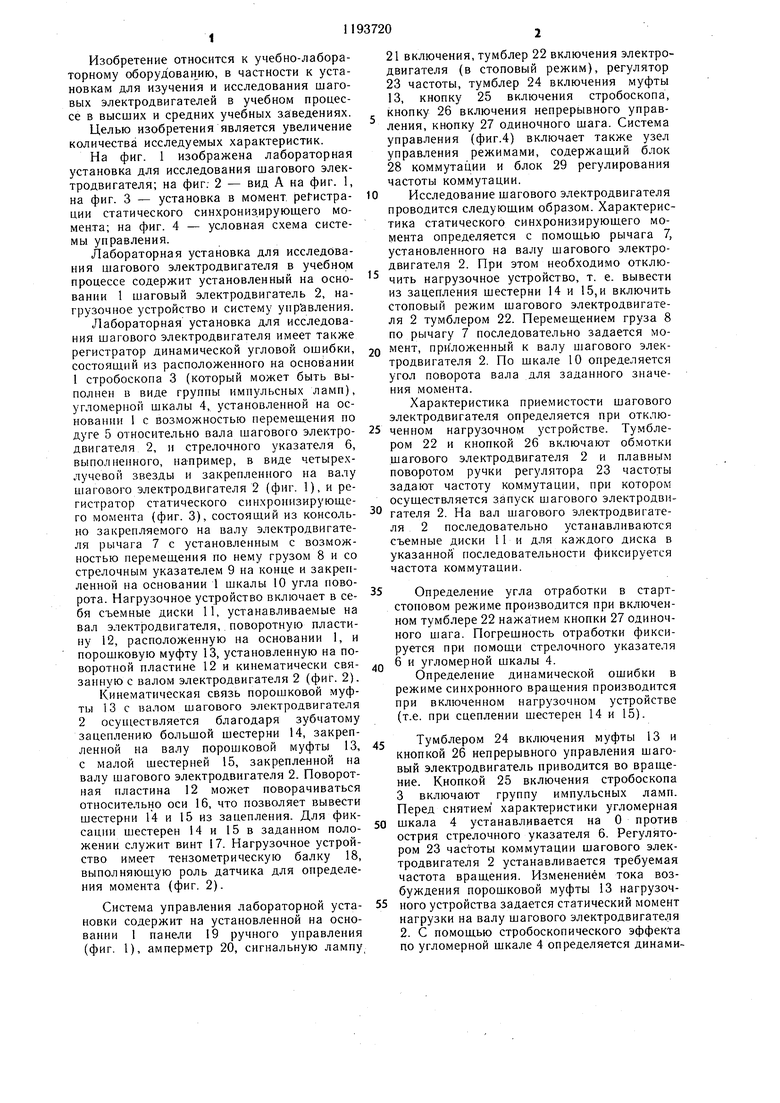
| название | год | авторы | номер документа |
|---|---|---|---|
| Лабораторная установка для исследования шарнирно-рычажного преимущественно кривошипно-ползунного механизма | 1985 |
|
SU1341670A1 |
| СТЕНД С ЭЛЕКТРОМАГНИТНЫМ НАГРУЗОЧНЫМ МОДУЛЕМ ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2010 |
|
RU2442995C2 |
| Устройство для динамометрических исследований электродвигателей | 1986 |
|
SU1543260A1 |
| Лабораторный стенд для исследования прямоугольного и косоугольного резания фрезой торфяных монолитов | 2020 |
|
RU2755779C1 |
| МЕХАНИЗМ УСТАНОВКИ ГРАНАТОМЕТА НА БОЕВУЮ МАШИНУ | 2011 |
|
RU2479816C2 |
| Устройство для проведения лабораторных работ по электротехнике | 1984 |
|
SU1211799A1 |
| Устройство для разработки суставов нижних конечностей | 1989 |
|
SU1671297A1 |
| МОДУЛЬНЫЙ ЭЛЕКТРОННЫЙ КОНСТРУКТОР | 2015 |
|
RU2596095C2 |
| УЧЕБНЫЙ СТЕНД ДЛЯ ОБУЧЕНИЯ СТРЕЛЬБЕ | 2008 |
|
RU2357185C1 |
| Стенд для адаптивной приработки карбюраторного двигателя внутреннего сгорания | 1988 |
|
SU1539570A1 |
ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ В УЧЕБНОМ НРОЦЕССЕ, содержащая установленный на основании И1аговый электродвигатель, нагрузочное устройство и систему управления, отличающаяся тем, что, с целью увеличения количества исследуемых характеристик, она имеет регистратор динамической угловой ошибки, состоящий из расположенного на основании стробоскопа, угломерной шкалы, установленной на основании с возможностью перемещения ио дуге относительно вала щагового электродвигателя, и стрелочного указателя, закрепленного на валу электродвигателя, регистратор статического синхронизирующего момента, состоящий из консольно закрепляемого на валу электродвигателя рычага с установленным с возможностью перемещения по нему грузом и со стрелочным указателем на конце и закрепленной на основании икалы угла поворота, а нагрузочное устройство имеет съемные диски, устанавливаемые на вал электродвигателя, поворотную пластину, расположенную на осi новании, и порошковую муфту, установленную на поворотной Пластине и кинематиче(Л ски связанную с валом электродвигателя. QD ОО ГчЭ 21 О
| Дискретный электроприводе шаговыми двигателями | |||
| Под ред | |||
| М | |||
| Г | |||
| Чиликина, М.: Энергия, 1971, с | |||
| ДРОВОПИЛЬНО-ДРОВОКОЛЬНОЕ УСТРОЙСТВО | 1923 |
|
SU567A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
