Изобретение относится к медицинской технике, а точнее к травматологии и ортопедии.
Цель изобретения - повышение функциональности путем обеспечения комплексной дозированной разработки крупных суставов обеих конечностей в активном и пассивном режимах.
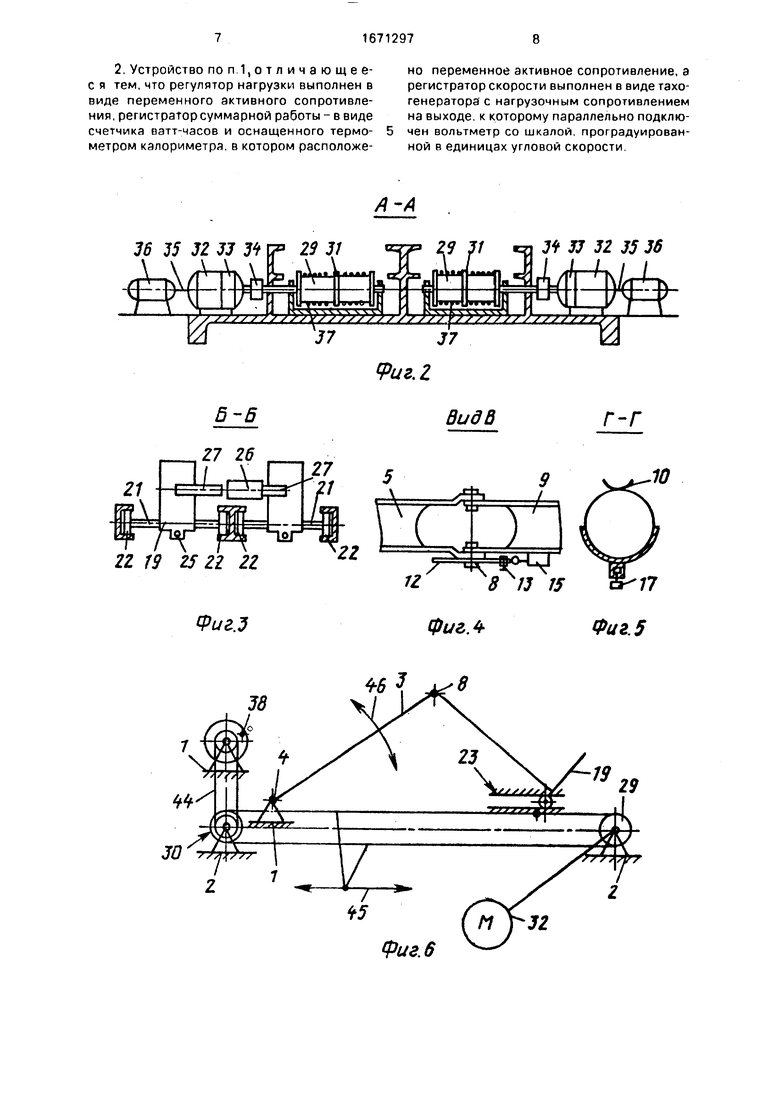
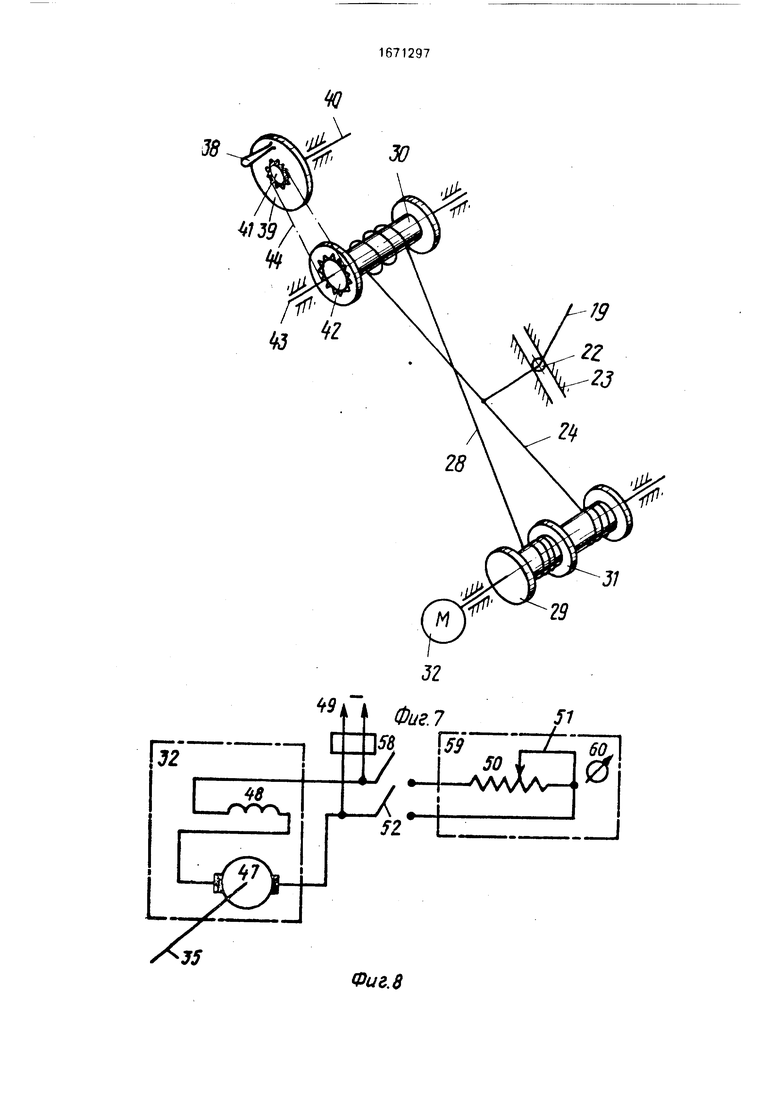
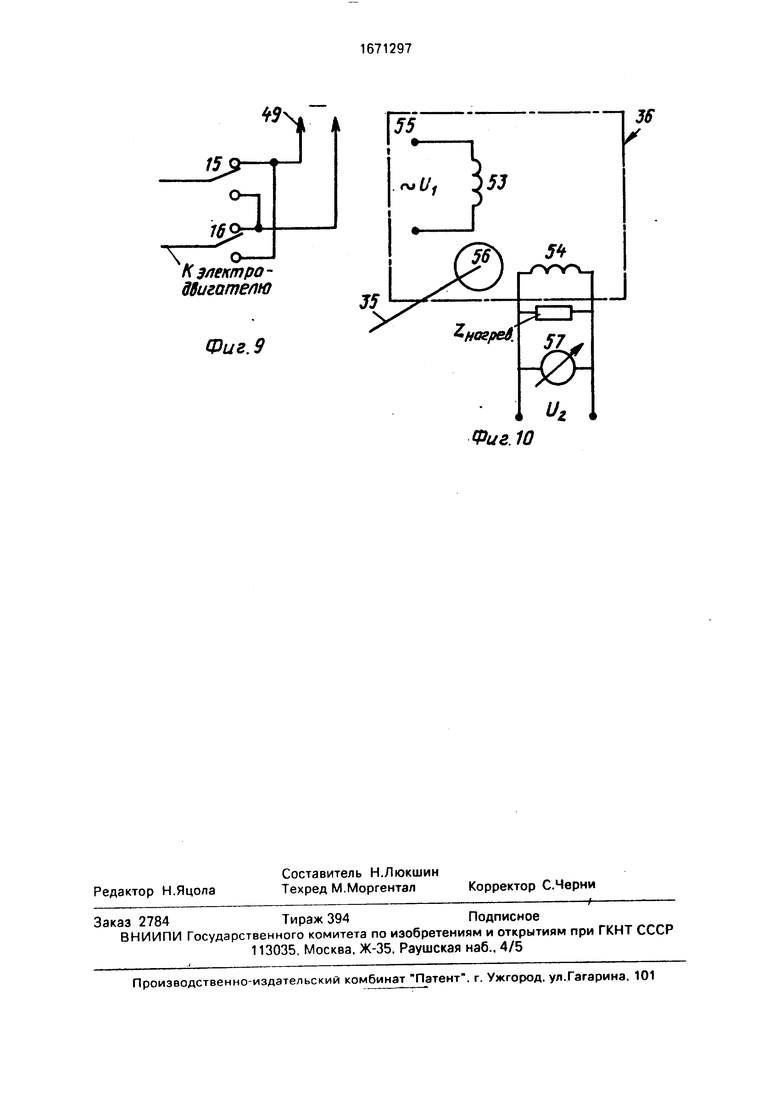
На фиг.1 изображено устройство, общий вид; на фиг.2 - разрез А-А на фиг. 1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - вид В на фиг.1; на фиг.5 - разрез Г-Г на фиг.1; на фиг.6 - кинематическая схема устройства; на фиг.7 - то же, аксонометрия; на фиг.8 - принципиальная схема электродвигателя; на фиг.9 - схема реверсирования электродвигателя; на фиг.10- принципиальная электрическая схема включения тахоге- нератора.
Устройство содержит сидение 1, укрепленное на раме 2,телескопический рычаг 3 на оси 4,закрепленной в сидении 1,соединенный с ложементом 5 бедра, зафиксированным винтом-фиксатором б и снабженным ремнем 7, при этом ложемент 5 бедра соединен шарниром 8 с ложементом 9 голени, оснащенным ремнями 10 и 11.
На оси шарнира 8 неподвижно относительно ложемента 5 бедра установлен угломерный диск 12 с регулируемыми упорами 13 и 14. На ложементеЭ голени установлены конечные выключатели 15 и.16 с возможностью взаимодействия с упорами 13 и 14; которые вместе с конечными выключателями 15 и 16 образуют регулятор амплитуды сгибания конечности.
Посредством винта-фиксатора 17 к ложементу 9 голени крепится телескопический рычаг 18, жестко соединенный со стоподержателем 19, оснащенным ремнем 20. Последний вместе с ремнями 7,10 и 11 образует элементы фиксации конечности. Стоподержатель 19 подвижно закреплен на оси 21, на концах которо имеются ролики 22, имеющие возможность качения по направляющим 23, являющимся частью рамы 2, и присоединен к тросу 24 посредством зажима 25. Стоподержатели 19 для левой и правой ног имеют возможность жесткого соединения между собой посредством муфты 26 и штырей 27. Трос 24 (с нижней ветвью 28) намотан на барабаны 29 и 30. причем концы троса 24 закреплены на барабане 29, разделенном ребордой 31. Барабаны 29иЗО имеют два вида привода - механический и ручной.
Механический привод осуществляется от электропривода, включающего электродвигатель 32 постоянного тока и редуктор 33 с передаточным числом 25-30. Условия
выбора электродвигателя и редуктора обусловлены необходимостью обратимости движения от электродвигателя к стопо- держателю 19 и обратно от стопы пациента
к валу электродвигателя 32, который в этом случае работает как генератор электрической энергии. Редуктор 33 соединен посредством электромагнитной муфты 34 с барабаном 29, которая может быть в одном
0 из режимов отключена, что соответствует наилегчайшему режиму активной разработки конечности. Электродвигатель 32 через вал 35 соединен с тахогенерагором 36, вырабатывающим на выходе ЭДС, пропорцио5 нальную частоте вращения вала 35. Часть 37 троса находится на барабане 29.
Шарнирно соединенные друг с другом и с рамой 2 телескопические рычаги 3 и 18 с ложементами бедра 5 i голени 9, а также
0 стоподержатель 19, связанный через трос 24 с барабанами 29 и 30 и электродвигателем 32 с редуктором 33, образуют механизм разработки. Устройство снабжено также дополнительным механизмом разгрузки (для
5 другой ноги), включающим такие же узлы. Ручной привод каждого барабана 30 осуществляется посредством рукоятки 38, укрепленной на диске 39, на одной оси 40 с которой имеется малая звездочка 41. Боль0 шая звездочка 42 насажена на вал 43 барабана 30. На. звездочки 42 и 41 надета цепь 44. Стрелками 45 и 46 показаны траектории движения соответственно троса 24 и телескопического рычага 3.
5 Якорь 47 электродвигателя 32 и статор 48 выполнены с соединением обмоток якоря 47 и статора 48. В режиме двигателя на клеммы 49 подается напряжение постоянного тока от выпрямителя, имеющего авто-.
0 трансформатор (не показаны). В режиме генератора электродвигатель 32 нагружен на переменное активное сопротивление 50 - регулятор нагрузки, имеющее ползунковый регулятор 51, при этом выклю5 чатель 52 включен.
Регистратор скорости содержит асинхронный тахогенератор 36 с обмотками возбуждения 53 и генераторной 54 на статоре 55, внутри которого на валу 35 расположен
0 якорь 56. К обмотке 53 возбуждения подано неизменное по амплитуде и частоте напряжение возбуждения Ui, а генераторная обмотка 54 подключена к нагрузочному сопротивлению ZHarp , с которого снимается
5 выходной сигнал U2 и подается на вольтметр 57, шкала которого проградуирована в единицах угловой скорости. В схему питания электродвигателя 32 введен также регистратор 58 суммарной работы в виде счетчика ватт-часов. Он обеспечивает учет
пассивной работы, производимой над пациентом при разработке его конечностей. Суммарная работа пациента п активное режиме оценивается с помощью калориметра 59, куда может быть помещено активное переменное сопротивление 50 или заменяющий его нагрузочный элемент (не показан). В калориметре 59 имеется термометр 60, по разности показаний которого с помощью формулы Q Cm (ta - ti) можно определить суммарную работу, произведенную пациентом.
Устройство используется следующим образом.
Режим пассивной разработки суставов
Пациента усаживают на сидение 1, подгоняют по длине конечности телескопические рычаги 3 и 18, стопорят их винтами-фиксаторами б и 17, обеспечивая совпадение оси шарнира 8 с воображаемой осью коленного сустава пациента. Затем ногу, или обе ноги закрепляют ремнями 7,10,11 и 20 На угломерном диске 12устанаоли- вают упоры 13 и 14 на необходимый угол сгибания-разгибания колена. Включают электродвигатель 32 и производят принудительную разработку конечности. Нагрузку контролируют регистратором 58 суммарной работы. При этом режиме движение передается от электродвигателя 32 на редуктор 33. через электромагнитную муфту 34 на барабан 29. Ветвь 28 троса 24 наматывается на барабан 29 и сматывается с барабана 30. Одновременно верхняя ветвь троса 24 сматывается с барабана 29 и наматывается на барабан 30. Ролики 22 движутся в направлении барабана 30, в эту же сторону движется стоподержатель 19, осуществляя сгибание конечности в коленном суставе. Вольтметр 57 показывает при этом угловую скорость движения конечности.
В этом режиме возможно изменение скорости вращения электродвигателя 32. Выключатель 52 отключен, регистратор 58 суммарной работы включен, конечные выключатели 15 и 16 замкнуты. Тахогенератор 36 включен в сеть питания (переменного тока), а его выход - на нагрузочное сопротивление ZHarp.
Режим активной разработки. Проводят те же манипуляции, что и в первом режиме, но электродвигатель 32 не включают, а дают команду пациенту на начало дрижения но- гэми. Возможна разработка суставов ног и только руками. Для этого пациент рукояткой 38 вращает диск 39. Питание при этом режиме отключено. Переменное активное сопрс- тивление 50 включено на выход электродвигателя 32, работающего в режиме генератора. Для измерения работы пациента переменное активное сипротппл ин 50 помещается внутрь калоримефа 59 и по показаниям термометра определяете работа Тахогенератор 36 вклю ,LH СРП,
переменною тока, и ei о осуществляется от барабана 29.
Предлагаемое устройство обладает большими функциональными РРТМО КНОСТ« ми, универсально. Имеется Р иможност параллельной, синхронней работы друх механизмов разработки, для чет муфта Г6 и штыри 27 соединяются При том возмгжна разработка больной ноги .
15
Формула изобретения
1. Устройство для ралраГютки суставов
нижних конечностей, содержспцее раму и
установленный на ней электропривод с реверсивным электродвигателем и редукто ром. кинематически с в ч ч ан м ы и г механизмом разработки, включающим два соединенных шарниром, оснащенным угломерным диском телескопических рыччга с
ложементами бедра и голени стоподержатель, жестко установленный на одном из рычагов, регулятор амплитуды их сгибанич, элементы фиксации конечности расположенные на ложементах и стоподержагеле. и
направляющие, закрепленные на раме, причем стоподержатель с возможностью перемещения установлен на направляющих, а конец другого рычага шарнирно соединен с рамой, отличающееся тем, что, с целью
повышения функциональности путем обеспечения комплексной дозированной разработки крупных суставов сбеи конечностей в активном и пассивном режимах, в него введены электрически соединенные с
цепью питания электропривода регулятор нагрузки, регистратор суммарной работы и регистратор скорости, а также закрепленные на раме сидение и дополнительный механизм разработки с электроприводом,
причем каждый из механизмов разработки выполнен в виде двух шарнирно установленных на раме барабанов с расположенным на них и прикрепленным к столодержателю тросом, -онцы которого
зафиксированы на одном из барабанов, посредством электромагнитной муфты соединенном с электроприводом, и диска с рукояткой, связанного цепной передачей с другим барабаном, а стоподержатели выполнены с возможностью взаимной блокировки, при этом регулятор амплитуды сгибания рычагов выполнен в виде упоров, установленных на угломерном диске, и конечных выключателей, закрепленных на ложементе голени.
2. Устройство поп,отличающее- но переменное активное сопротивление, а

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ МЫШЦ ГОЛЕНИ И СТОПЫ | 1991 |
|
RU2014053C1 |
| Кресло для разработки подвижности в суставах нижних конечностей | 1988 |
|
SU1600770A1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| Устройство для рентгенодиагностики повреждений капсулярно-связочного аппарата коленного сустава | 1985 |
|
SU1319825A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Устройство для разработки коленного сустава | 1989 |
|
SU1627176A1 |
| Шина для нижней конечности | 1980 |
|
SU921560A1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
Изобретение относится к медицинской технике, а точнее - к травматологии и ортопедии. Цель - повышение функциональности путем обеспечения комплексной дозированной разработки крупных суставов обеих конечностей в активном и пассивном режимах. Устройство содержит раму 2 с сидением 1, реверсивный электродвигатель постоянного тока с редуктором, механизм воздействия на конечность от движущего троса 24, соединенного со стоподержателем 19. При этом нога пациента укреплена элементами фиксации - ремнями 7, 10, 11, 20 к ложементам бедра 5 и голени 9, а также к стоподержателю 19. Ложементы 5, 9 соединены между собой шарниром 8, на котором насажен угломерный диск 12 с регулируемыми упорами 13, 14. Бесконечный трос 24 намотан на барабаны 29, 30, причем первый из них выполнен с ребордой посередине. Барабан 29 имеет привод от электродвигателя (через редуктор) или от рукоятки 38 с диском 39, что соответствует ручному приводу. Заданная амплитуда движения ноги (ног) задается регулируемыми упорами 13, 14 и конечными выключателями 15,16, размещенными на ложементе голени 9, с помощью угломерного диска 12. Нагрузка на пациента осуществляется с помощью активного переменного сопротивления. Имеется возможность измерять работу пациента (или работу, затрачиваемую на разработку конечностей пациентом) с помощью термометра и калориметра, а также регистратора суммарной работы - счетчика ватт-часов. Скорость движения конечности измеряется тахогенератором, подключенным к нагрузочному сопротивлению, с которого снимается напряжение на вольтметр, проградуированный в единицах угловой скорости. 1 з.п.ф-лы, 10 ил.
с я тем, что регулятор нагрузки выполнен в виде переменного активного сопротивлерегистратор скорости выполнен в виде тахо- генератора с нагрузочным сопротивлением
ния, регистратор суммарной работы-в виде на выходе, к которому параллельно подклю- счетчика ватт-часов и оснащенного термо- 5 чен вольтметр со шкалой, проградуирован- метром калориметра, в котором расположе- ной в единицах угловой скорости
36 35 П 33 J -L-A
21
5 -В Z7 26
MWM«M « 4VММШММН
7ЧП
1 19 25 22 22
Пег
27
&
гг
Фиг.З
регистратор скорости выполнен в виде тахо- генератора с нагрузочным сопротивлением
А-А
J Я 32 35 36
Фиг. 2
ВидВ
Г-Г
ггггт
IVГ 1J
К8 13 15
фиг.4
19
29
Фиг. 6
45
19
31
29
Фиг. 8
15
«N/
Л
П
гб2-±
Кэлектро- ЗВигатепю
Фиг. 9
Ш
I 36
V
nj
и,
5J
J
Л
Х
погреб .
U
г i
Фиг. 10
| Электромеханическое устройство дляРАзРАбОТКи СуСТАВОВ НижНиХ КОНЕчНОСТЕй | 1979 |
|
SU848027A1 |
| кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
