Изобретение относится к обучающим играм и учебным пособиям, и может быть использовано для обучения студентов и детей школьного возраста основам физики, электротехники и электроники.
Известен электронный конструктор [Патент РФ на полезную модель №38245, МПК G09B 5/14, B42D 1/04. Опубл. 27.05.2004], содержащий по меньшей мере одно основание с нанесенными на него символами, выполненное в виде информационно-образовательных карточек, при этом совокупность одного вида карточек образует блок формирования заданий, содержащий классифицированный модуль учебных задач, модуль опросных таблиц с иерархическим построением по степени сложности учебного материала и модуль выбора заданий, содержащий автоматическую или/и ручную выборку, а другая совокупность карточек образует блок управления учебным процессом, содержащий модуль матриц контроля, модуль сравнения и анализа решения, модуль решения задач и модуль матриц диагностики, при этом оба блока скомпонованы и информационно взаимосвязаны, формируют электронную базу данных учебного материала.
Недостатками электронного конструктора являются отсутствие возможности компоновки и натурного исследования дополнительных пользовательских электронных схем.
Известно электронное самообучающее устройство [Патент США №4358273, МПК G09B 19/02. Опубл. 09.11.1982], содержащее дисплей, регистры, счетчики, арифметическое устройство, генератор случайных чисел, функциональную клавиатуру, память, схему контроля и схему проверки правильности ответа, и представляющее собой устройство для самотестирования, в котором запрограммированы правильные ответы на вопросы. В процессе тестирования обучающийся вводит с помощью клавиатуры номер ответа, а на дисплее отображается информация о правильном или неправильном ответе на вопрос.
Недостатками электронного самообучающего устройства являются отсутствие возможности натурного исследования электронных устройств.
Известно электронное учебное пособие [Патент США №5632624. МПК G09B 19/02. Опубл. 27.05.1997], содержащее микропроцессор, жидкокристаллический дисплей с контроллером, клавиатуру, переключатели, блок памяти, источник питания. Электронное учебное пособие находится в корпусе, к нему прилагаются сменные картриджи с размещенным на них текстовым материалом, включающим вопросы и ответы на каждый вопрос. Микропроцессор анализирует ответ на вопрос и выводит на дисплей общее количество ответов и номер правильного ответа.
Недостатками электронного учебного пособия являются отсутствие возможности натурного исследования электронных устройств.
Известен электронный конструктор «Знаток» [Электронный ресурс. Режим доступа: http://www.znatok.ru/Konstruktor.html. - Загл. с экрана], содержащий набор дискретных элементов, позволяющий собирать аналоговые и цифровые электронные схемы и предназначенный для изучения школьниками основ электроники и физики.
Недостатками электронного конструктора «Знаток» являются ограниченное количество исследуемых схем, отсутствие возможности исследования электромеханических устройств, устройств беспроводной передачи электроэнергии, микропроцессорных и релейных систем управления, а также отсутствие модуля дистанционного управления.
Наиболее близким является электронный конструктор [Патент РФ на полезную модель №14420, МПК A6F 9/24. Опубл. 27.07.2000], содержащий автогенератор, выключатели и кнопки управления, звуковой индикатор, датчики, блок интегральных схем, расширители, блок дискретных элементов, схему световой индикации, причем выход автогенератора подключен к входу блока интегральных схем, другие входы которого соединены с выключателями и кнопками управления, с выходами датчиков, с расширителями, а выходы блока интегральных схем закоммутированы с расширителями, с входом звукового индикатора, с входами схемы световой индикации и блока дискретных элементов, выход которого подключен к входу схемы световой индикации.
Недостатками данного электронного конструктора являются отсутствие возможности исследования электромеханических устройств, устройств беспроводной передачи электроэнергии, микропроцессорных и релейных систем управления, а также возможности дистанционного управления.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании удобного в использовании модульного электронного конструктора с расширенными функциональными возможностями.
Техническим результатом является расширение арсенала средств обучения основам физики, электротехники и электроники, а также, за счет увеличение количества исследуемых схем, расширение функциональных возможностей модульного электронного конструктора.
Технический результат достигается тем, что модульный электронный конструктор содержит блок интегральных схем, кнопки управления, датчики, блок дискретных элементов, звуковой индикатор, схему световой индикации, при этом в него введены наборное поле, сетевой блок питания, блок релейного управления, блок микропроцессорного управления, блок дистанционного управления и съемные модули, причем наборное поле оснащено элементами механического и электрического соединения с возможностью установки и взаимодействия блоков и съемных модулей.
Модульный электронный конструктор характеризуется тем, что для исследования электромеханических преобразователей в конструктор введен съемный модуль электромеханических преобразователей.
Модульный электронный конструктор характеризуется тем, что для исследования процессов электромеханического преобразования и передачи электроэнергии в конструктор введены съемный модуль электромеханического генератора и модуль беспроводной передачи электроэнергии.
Сущность предлагаемого технического решения заключается в том, что в состав модульного электронного конструктора введены модуль электромеханических преобразователей, модуль электромеханического генератора, модуль беспроводной передачи электроэнергии, модули микропроцессорных и релейных систем управления, а также модули дистанционного управления, что позволяет увеличить количество выполняемых учебных задач.
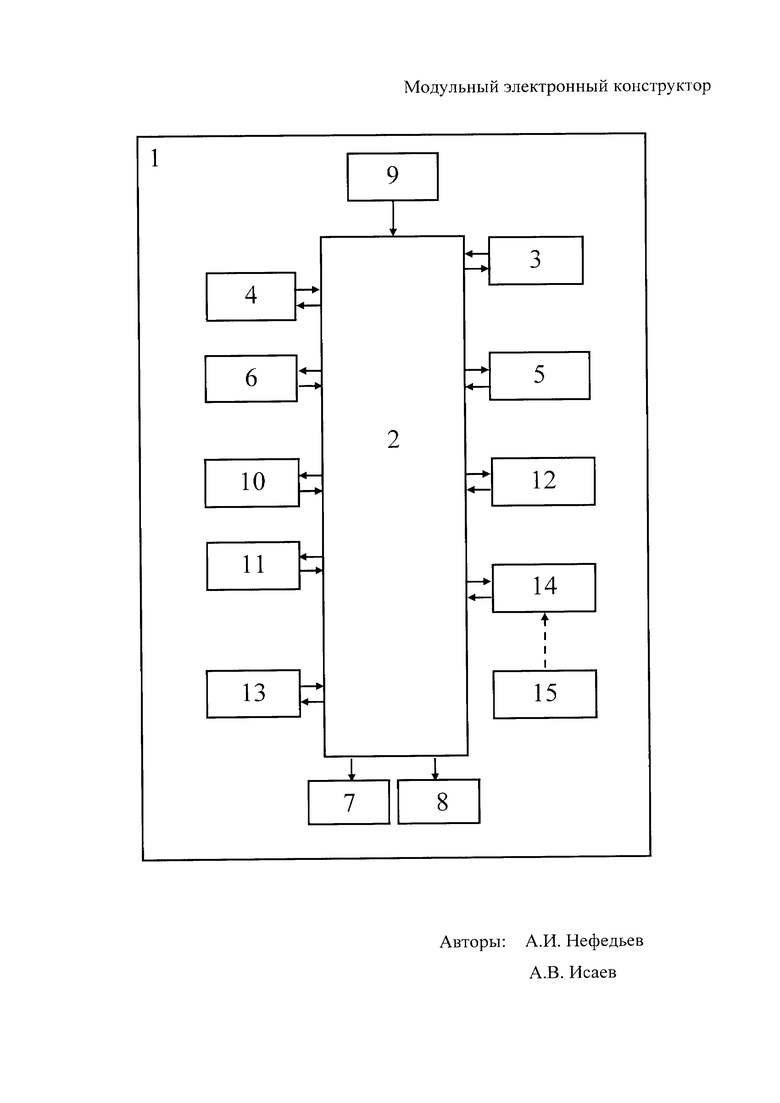
На чертеже приведена структурная схема модульного электронного конструктора. Модульный электронный конструктор состоит из корпуса 1, наборного поля 2, оснащенного элементами механического и электрического соединения с устанавливаемыми на нем блоками и съемными модулями в зависимости от поставленной учебной задачи, к которому подсоединены блок интегральных схем 3, кнопки управления 4, датчики 5, блок дискретных элементов 6, звуковой индикатор 7, схема световой индикации 8, сетевой блок питания 9, модуль электромеханических преобразователей 10, модуль электромеханического генератора 11, модуль беспроводной передачи электроэнергии 12, блок релейного управления 13, содержащий набор электромеханических реле, и блок микропроцессорного управления 14, блок дистанционного управления 15, причем все устанавливаемые модули объединены в единую систему через наборное поле 2, а питание всех установленных на наборном поле модулей осуществляется от сетевого блока питания 9.
Модульный электронный конструктор работает следующим образом. Блок сетевого питания 9 модульного электронного конструктора подключается к электросети. В зависимости от поставленной учебной задачи к наборному полю 2 подключаются модули с необходимыми для конкретной работы элементами, и производится их коммутация через наборное поле 2 и кнопки управления 4.
Блок интегральных схем 3 содержит набор аналоговых и цифровых микросхем и позволяет исследовать как их работу, так и различные виды электрических схем, построенных с применением микросхем из блока интегральных схем 3.
Блок дискретных элементов 6 содержит набор различных дискретных элементов, например резисторы, конденсаторы, катушки индуктивности, диоды, транзисторы, и позволяет исследовать как сами дискретные элементы, так и различные виды электрических схем, а также различные виды электрических связей между подключенными модулями.
При исследовании электромеханических преобразователей используются датчики 5, которые фиксируют положение подвижных частей электромеханических преобразователей, входящих в модуль электромеханических преобразователей 10, а также частоту вращения и температуру окружающей среды, а также обеспечивают связь с блоком дистанционного управления 15.
Модуль электромеханического генератора 11 и модуль беспроводной передачи электроэнергии 12 позволяют исследовать процессы электромеханического преобразования и передачи электроэнергии, в том числе и беспроводной передачи электроэнергии.
Управление всеми установленными на наборном поле 2 модулями осуществляется от блока микропроцессорного управления 14 непосредственно, или через блок релейного управления 13. Ручное управление установленными на наборном поле 2 модулями осуществляется через кнопки управления 4 и блок интегральных схем 3.
Все установленные на наборное поле 2 модули получают питание от сетевого блока питания 9.
Пример использования модульного электронного конструктора для выполнения лабораторной работы по исследованию шаговых электромеханических приводных систем. При этом достигаются следующие учебные цели: изучение основ электромеханического преобразования энергии, изучение принципов управления режимами работы шаговых электромеханических приводных систем, получение навыков разработки и схемной реализации системы декодирования информационных сигналов датчиков обратной связи и управления шаговой электромеханической приводной системой.
Исследуемая шаговая электромеханическая приводная система реализована на входящем в состав блока электромеханических преобразователей 10 шаговом двигателе ДШИ-200-1-1. Рабочим органом шаговой электромеханической приводной системы является подъемно-транспортное устройство (вариант а), горизонтальное транспортное устройство (вариант б). Для оценки сигналов обратной связи использованы датчики тока, напряжения, датчик скорости и система датчиков пространственного позиционирования перемещаемого груза, которая реализуется на оптико-электронных датчиках (вариант а) и электромагнитных датчиках (вариант б). Управление шаговым двигателем, входящим в состав шаговой электромеханической приводной системы осуществляется посредством элементов блока релейного правления 13, элементов блока интегральных схем 3 и блока дискретных элементов 6, а так же с использованием функциональных возможностей блока микропроцессорного управления 14. Для индикации режимов работы шаговой электромеханической приводной системы, крайних положений перемещаемого груза и моделируемых аварийных режимов работы шаговой электромеханической приводной системы, таких как перегруз, продолжительный тяжелый пуск шагового электродвигателя, свал (обрыв) груза и потеря питающего напряжение, используются звуковой индикатор 7 и схема световой индикации 8.
Проведение лабораторной работы состоит из следующих учебных модулей: разработки релейной системы управления подключения шаговой электромеханической приводной системы, реализуемой на базе кнопок управления 4, блока интегральных схем 3, функциональных возможностей блока микропроцессорного управления 14, и шагового двигателя, входящего в состав блока электромеханических преобразователей 10 (модуль 1); разработки алгоритма, реализации и отладки системы получения и обработки сигналов первичной информации с используемых в лабораторной работе датчиков обратной связи - датчиков тока, напряжения, скорости и системы датчиков распознавания положения перемещаемого рабочего органа шаговой электромеханической приводной системы, использовании элементов блока интегральных схем 3 и элементов блока дискретных элементов 6, а так же функциональных возможностей блока микропроцессорного управления 14 (модуль 2); разработки алгоритма, реализации и отладки системы управления шаговым двигателем модуля электромеханических преобразователей 10 с использованием функциональных возможностей блока микропроцессорного управления 14 и сигналов обратной связи с реализованной ранее системы сбора и обработки первичной информации датчиков. В рамках проведения лабораторной работы обучаемыми могут быть использованы готовые решения по реализации схем и алгоритмов систем управления (модуль 3).
Для измерения электромеханических параметров исследуемой шаговой электромеханической приводной системы в лабораторной установке используется информация первичных датчиков и алгоритм ее обработки и пересчета, с использованием функциональных возможностей блока микропроцессорного управления 14. Полученные экспериментальные данные и зависимости выводятся на графический дисплей блока световой индикации 8.
Помимо устройств, входящих в состав модульного электронного конструктора, предусмотрена возможность проведения осциллографических измерений наблюдаемых электромеханических параметров лабораторной работы при помощи подключаемого стороннего оборудования.
В ходе лабораторных работ исследуются рабочие характеристики шаговой электромеханической приводной системы в статических и динамических режимах ее работы, алгоритмы систем релейного и микропроцессорного управления, а так же исследуются рабочие характеристики используемых в лабораторной работе датчиков обратной связи.
Таким образом, лабораторная работа по исследованию шаговых электромеханических приводных систем, реализуемая на базе модульного электронного конструктора, охватывает значительную часть теоретического и практического материала из области электротехники, электрических машин и электропривода, электроники и микропроцессорной техники, а так же учебного материала по метрологии и измерительной технике. В ходе лабораторной работы студенты приобретают навыки разработки и отладки программ для микроконтроллеров.
Алгоритм проведения данной лабораторной работы может быть следующим:
- реализация модуля 1
1. Разработать релейно-контактную схему подключения шаговой электромеханической приводной системы, используя рассматриваемые в лекционном курсе методы синтеза и оптимизации систем управления (или воспользоваться вариантом, предложенным в методическом приложении к лабораторному практикуму).
2. Выбрать из предложенной элементной базы блока релейного управления 13 и элементной базы кнопок управления 4 требуемые элементы для реализации разработанной релейно-контактной схемы подключения шаговой электромеханической приводной системы.
3. Выполнить сборку разработанной релейно-контактной схемы подключения шаговой электромеханической приводной системы, используя в качестве сигнализации реализации команд управления элементы схемы световой индикации 8.
4. Выполнить проверку работоспособности реализуемой релейно-контактной схемы подключения шаговой электромеханической приводной системы.
- реализация модуля 2
1. Выполнить анализ требуемых для реализации системы управления с обратной связью шаговой электромеханической приводной системой информационных сигналов и необходимых для их получения датчиков 5 модульного электронного конструктора (или воспользоваться вариантом, предложенным в методическом приложении к лабораторному практикуму).
2. Получить экспериментально рабочие характеристики выбранных датчиков обратной связи, используя функциональный интерфейс датчиков 5.
3. Разработать схемы преобразования первичного сигнала датчиков и дальнейшего сопряжения с блоком микропроцессорного управления 14, используя элементную базу блока интегральных схем 3 и блока дискретных элементов 6, а так же функциональных возможностей блока микропроцессорного управления 14 (или воспользоваться вариантом, предложенным в методическом приложении к лабораторному практикуму).
4. Разработать алгоритм и реализовать схему вывода служебных и информационных сигналов на графический дисплей схемы световой индикации 8 (или воспользоваться вариантом, предложенным в методическом приложении к лабораторному практикуму), воспользовавшись функциональным интерфейсом и программным обеспечением схемы световой индикации 8 и блока микропроцессорного управления 14.
5. Выполнить сопряжение преобразованных сигналов датчиков обратной связи и схемы управления выводом служебных и информационных сигналов на графический дисплей схемы световой индикации 8, используя функциональные возможности блока микропроцессорного управления 14.
6. Разработать систему питания датчиков, используя модуль электромеханического генератора 11 и модуль беспроводной передачи электроэнергии 12.
7. Выполнить проверку работоспособности интегрированной системы съема, обработки и вывода на графический дисплей сигналов обратной связи.
- реализация модуля 3:
1. Разработать алгоритм управления и реализовать систему управления шаговым двигателем ДШИ-200-1-1, используя устройства и функциональные возможности модуля электромеханических преобразователей 10 и блока микропроцессорного управления 14 (или воспользоваться вариантом, предложенным в методическом приложении к лабораторному практикуму).
2. Получить экспериментальные рабочие характеристики шагового электродвигателя ДШИ-200-1-1 в режимах статической нагрузки и режимах, моделирующих аварийную работу шаговой электромеханической приводной системы, таких как перегруз, затяжной пуск при повышенных токах и обрыв или свал груза, используя устройства и функциональные возможности модуля электромеханических преобразователей 10 и блока микропроцессорного управления 14, а также используя индикаторы схемы световой индикации 8.
3. Интегрировать разработанную систему обратной связи в систему управления шаговой электромеханической приводной системы. Получить экспериментально рабочие характеристики шагового электродвигателя ДШИ-200-1-1 в режимах статической нагрузки и режимах, моделирующих аварийную работу шаговой электромеханической приводной системы, таких как перегруз, затяжной пуск при повышенных токах и обрыв или свал груза, используя устройства и функциональные возможности модуля электромеханических преобразователей 10 и блока микропроцессорного управления 14, а также используя индикаторы схемы световой индикации 8.
Все операции с блоком микропроцессорного управления 14 также могут быть выполнены при помощи блока дистанционного управления 15.
Таким образом, введение наборного поля в состав модульного электронного конструктора, оснащенного элементами механического и электрического соединения с устанавливаемыми на нем, в зависимости от поставленной учебной задачи съемными модулями, в том числе модуля электромеханических преобразователей, модуля электромеханического генератора и модуля беспроводной передачи электроэнергии, блока релейного, блока микропроцессорного управления и блока дистанционного управления ,позволяет за счет увеличения количества исследуемых схем расширить функциональные возможности модульного электронного конструктора, а так же наращивать конфигурацию исследуемой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| ВРАЩАЮЩАЯСЯ НАКЛОННАЯ БАРАБАННАЯ ПЕЧЬ ДЛЯ ОКИСЛИТЕЛЬНОЙ ОБРАБОТКИ МОДИБДЕНСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2020 |
|
RU2746077C1 |
| УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И ЭЛЕКТРОПРИВОДОВ | 2011 |
|
RU2473921C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ СИГНАЛАМИ РЕЛЕЙНОЙ ЗАЩИТЫ И ПРОТИВОАВАРИЙНОЙ АВТОМАТИКИ | 2012 |
|
RU2479903C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ СИГНАЛАМИ РЕЛЕЙНОЙ ЗАЩИТЫ И ПРОТИВОАВАРИЙНОЙ АВТОМАТИКИ | 2012 |
|
RU2479904C1 |
| МОБИЛЬНЫЙ УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2490720C1 |
| Централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции | 2019 |
|
RU2720318C1 |
| МИКРОПРОЦЕССОРНАЯ ПАНЕЛЬ УПРАВЛЕНИЯ | 2014 |
|
RU2570572C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2007 |
|
RU2350972C1 |
| ЯЧЕЙКА ХРАНЕНИЯ, ЗАРЯДА И ВЫДАЧИ МЕТКИ РАДИОПОЗИЦИОНИРОВАНИЯ | 2023 |
|
RU2831421C1 |
Изобретение относится к обучающим играм и учебным макетным пособиям и может быть использовано для обучения студентов и детей школьного возраста основам физики, электротехники и электроники. Модульный электронный конструктор содержит блок интегральных схем, кнопки управления, датчики, блок дискретных элементов, звуковой индикатор, схему световой индикации, наборное поле, оснащенное элементами механического и электрического соединения устанавливаемых на нем в зависимости от поставленной учебной задачи модулей, сетевой блок питания, блок микропроцессорного управления и блок дистанционного управления, модуль электромеханических преобразователей, модуль электромеханического генератора, модуль беспроводной передачи электроэнергии и блок релейного управления. Техническим результатом является расширение арсенала средств обучения основам физики, электротехники и электроники, а также, за счет увеличения количества исследуемых схем, расширение функциональных возможностей модульного электронного конструктора. 2 з.п. ф-лы, 1 ил.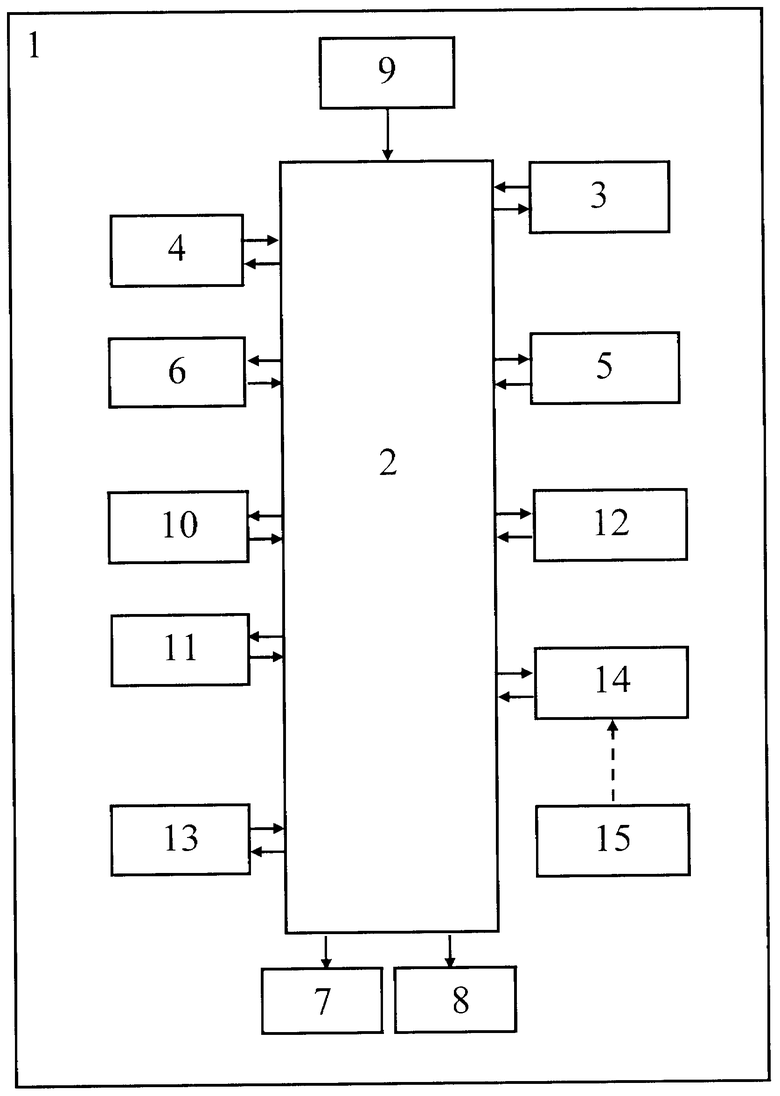
1. Модульный электронный конструктор, содержащий блок интегральных схем, кнопки управления, датчики, блок дискретных элементов, звуковой индикатор, схему световой индикации, отличающийся тем, что в него введены наборное поле, сетевой блок питания, блок релейного управления, блок микропроцессорного управления, блок дистанционного управления и съемные модули, причем наборное поле оснащено элементами механического и электрического соединения с возможностью установки и взаимодействия блоков и съемных модулей.
2. Модульный электронный конструктор по п. 1, отличающийся тем, что для исследования электромеханических преобразователей в него введен съемный модуль электромеханических преобразователей.
3. Модульный электронный конструктор по п. 1, отличающийся тем, что для исследования процессов электромеханического преобразования и передачи электроэнергии в него введены съемный модуль электромеханического генератора и модуль беспроводной передачи электроэнергии.
| Угольный микрофон | 1929 |
|
SU14420A1 |
| Способ термической переработки сланцев | 1934 |
|
SU38245A1 |
| ИГРУШКА-КОНСТРУКТОР С ФУНКЦИОНАЛЬНЫМИ БЛОКАМИ | 2005 |
|
RU2397000C2 |
| US 6443796 B1, 03.09.2002 | |||
| US 5411428 A, 02.05.1995. | |||

