t
Изобретение относится к водному хозяйству, а именно к системам для регулирования водоподачей в гидротехнических сооружениях, «и может использовано при автоматизации систем каскадного регулирования расходов воды на открытых ирригационных каналах.
Цель изобретения - повышение точности и устойчивости системы.
Динамический нелиней|1ый преобразователь отображает-взаимосвязь .скорости отклонения уровня воды в кон-це участка и возмущающего воздейстВИЯ при определенном стабилизирующем уровне воды
.й 1().
д{
При расчете этой зависимости определяют объем воды, заключенный в 0,01-метровом слое глубины и. задают различные значения Q, при этом получают
91 . УО
9t да
По этим данным строят график завсимости
Ш
Si
Статический нелинейный преобразователь отображает взаимосвязь приращения уровня в начале участка с приращением расхода в начале участка в зависимости от изменяющегося резервного объема и времени переходного процесса
(ijM.
При расчете этой зависимости, с учетом гидравлических параметров участка канала разбивают диапазон изменения глубины в начале участка на равные части, находят расход для : каждой глубины и для каждого расхода определяют резервные емкости, которые образуются между кривой свободной поверхности и линией, соответствующей равномерному движению воды соответствующего расхода, пользуясь уравнением Бахметьева:
- По-ггО)5(10-5(г.1,
Эти объемы используются для подпитки потребителей в течение времени tg , за которое расход воды, подаваемой в начале участка, компенсирует возмущение, приложенное в
198476
конечном створе участка канала. .,.
де
-время, за которое фронт волны после начала открытия затвора, расположенного в начале участка, достигнет конечного створа;
-время, за которое в контролируемый створ ПО дается половина стока от общего его изменения в период переходного процесса.
Учитывая, что
-гЛ- о .
- /у
Т,
Ч Т, ,
-fe-,-
пределяют
де
VF.
.P,o/ г
т, - -d/ -S-/ H,ot.t:,(i-M/i -(X2)-V
-
ч
,
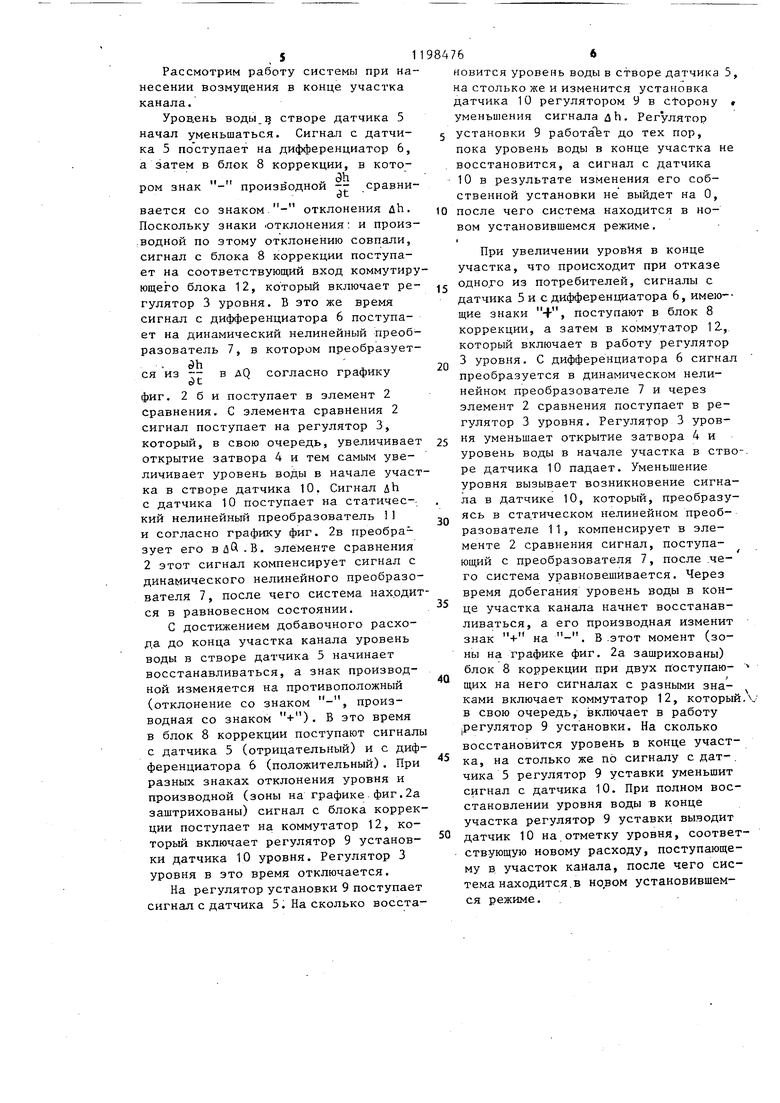
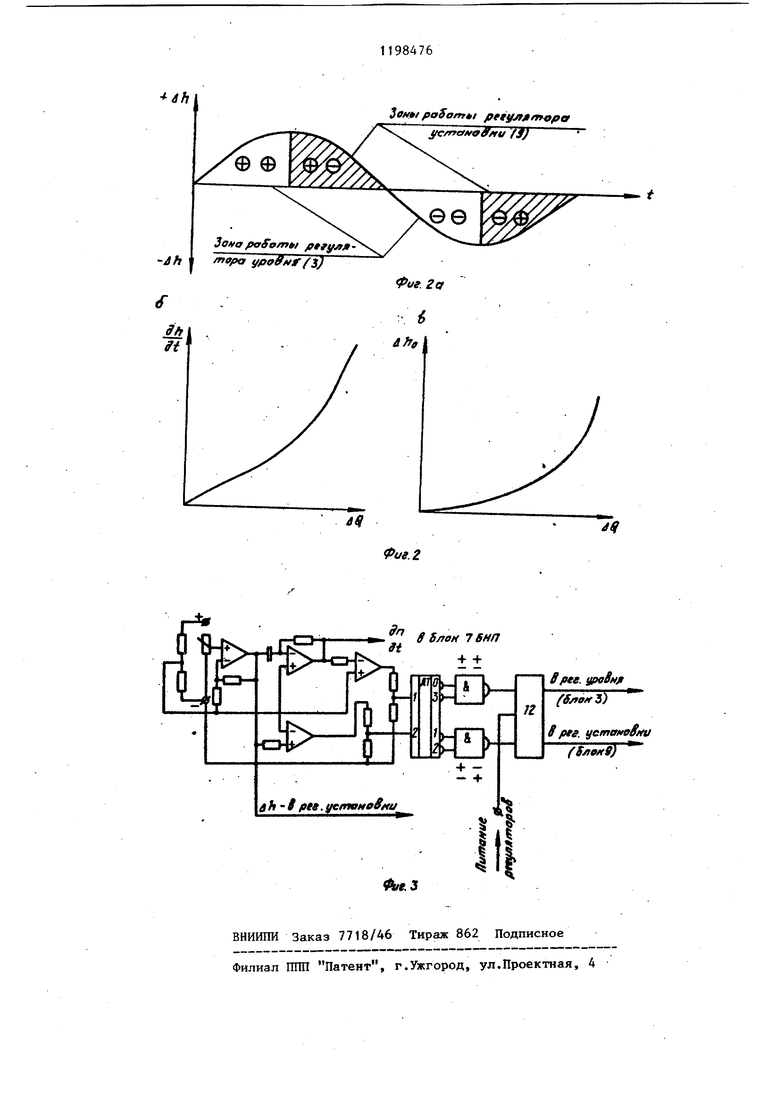
1 6 ., ( l SU 4то Для каждой заданной глубины в начале участка получают 1 определяют t.. Находят Q ветственно для каждой глубины в инте вале наполнений в начале участка от л«кс .MiHM строят график зависимости , 4а(дъ) . На фиг. 1 представлена блок-схеtia системы регулирования уровня вод на участке ирригационного канала; на фиг, 2 - графики коммутации регуляторов (а), динамического (б) и статического (в) нелинейных преоб разователей; на фиг. 3 - схема блок коррекции. Система содержит участок канала 1, элемент 2 сравнения, сигнал с которого идет на регулятор 3 уровня, связанный с регулирующим органом 4, датчик 5 уровня верхнего бьефа, расположенный в конце участка канала, сигнал с которого идет на дифференциатор 6, который, в сво очередь, связан с динамическим нели нейным преобразователем 7 и блоком 8 коррекции, в то же время датчик 5 связан с блоком коррекции 8 и с регулятором 9 установки датчика 10 уровня нижнего бьефа, расположенного в начале участка канала. Датчик 10 уровня нижнего бьефа связан со статическим нелинейным преобразователем 11, который, в свою очередь, связан с элементом 2 сравнения. Два выхода блока 8 коррекции подключены к двум входам коммутирующего блока 12, выходы которого связаны с регуля тором уровня и регулятором установки соответственно. Система работает в режиме регули рования и режиме самонастройки. Переход с одного режима работы на дру гой осуществляется согласно графику приведенному на фиг. 2 а. При совпа дении знаков отклонения уровня и ,. первой производной по этому отклоне нию система работает в режиме регулирования (на графике эти зоны не заштрихованы), В тот момент, когда знак первой производной изменяется 76 и не совпадает со знаком отклонения уровня, система переходит в режим самонастройки (на графике фиг. -2 а эти зоны заштрихованы). Для реализации этого закона служит блок 8 коррекции, схема которого представлена на фиг. 3, во взаимосвязи с потенциальнометрическим датчиком 5, дифференциатором 6 и коммутирующим блоком 12. Блок коррекции работает следующим образом. При, нарушении равновесия с диагоналей электрического моста (датчик 5) стигнал поступает на дифференциальный усилитель - дифференциатор 6, а затем на два решающих усилителя На. верхнем по схеме производится дифференцирование сигнала во времени, а нижний является компаратором, в котором выделяется знак сигнала отклонения. После дифференцирования сигнал идет на второй компаратор, в котором выделяется знак производной. Далее сигналы поступают на два «хода дешифратора. Четыре дешифратора связаны с логическими схемами (2ИНЕ) . Логическ 1е элементы связаны с двумя входами коммутирующего блока 12, который коммутирует включение регулятора 3 уровня и регулятора 9 установки. Регулятор-.уровня включается при условии совпадения знаков отклонения и производной, а регулятор установки - при несовпадении этих знаков. Сигнал относительного отклонения снимается до компаратора, а сигна;л производной - после дифференцирующей цепи. Статический и динамический нелинейные преобразователи функционально учитывают гидродинамические па- . раметры объекта регулирования. Статический преобразователь 11 принимает сигнал ЛЬ и согласно нелинейной расчетной зависимости преобразует его в dQ - добавочный расход, соответствующий приращению уровня dh. Динамический преобразователь 7 ah ринимает сигнал - с дифференциаrftора 6 и согласно нелинейно расчетной зависимости преобразует его в Q - изменение расхода потребителем. аким образом, в элементе 2 сравнеия сравниваются по величине расходы озмущающего и управляющего воздействия . . 5 Рассмотрим работу системы при на несении возмущения в конце участка канала. Уров,ень воды створе датчика 5 начал уменьшаться. Сигнал с датчика 5 поступает на дифференциатор 6, а затем в блок 8 коррекции, в кото „ „ , „ ЭЬ ром знак - производной -- сравни вается со знаком - отклонения uh. Поскольку знаки .отклонения: и произ :Водной по этому отклонению совпали, сигнал с блока 8 коррекции поступает на соответствующий вход коммутиру ющего блока 12, который включает ре гулятор 3 уровня. В это же время сигнал с дифференциатора 6 поступает на динамический нелинейный преобразователь 7, в котором преобразуется из -- в AQ согласно графику (3 с фиг. 2 б и поступает в элемент 2 сравнения. С элемента сравнения 2 сигнал поступает на регулятор 3, который, в свою очередь, увеличивае открытие затвора 4 и тем самым увеличивает уровень воды в начале учас ка в створе датчика 10. Сигнал дЬ с датчика Ю поступает на статичес-. кий нелинейный преобразователь 1 и согласно графику фиг. 2в преобразует его в Д .В. элементе сравнения 2 этот сигнал компенсирует сигнал с динамического нелинейного преобразо вателя 7, после чего система находи ся в равновесном состоянии. С достижением добавочного расхода до конца участка канала уровень воды в створе датчика 5 начинает восстанавливаться, а знак производной изменяется на противоположный (отклонение со знаком -, производная со знаком ). В это время в блок 8 коррекции поступают сигнал с датчика 5 (отрицательный) и с диф ференциатора 6 (положительный). При разных знаках отклонения уровня и производной (зоны на графике фиг.2а заштрихованы) сигнал с блока коррек ции поступает на коммутатор 12, который включает регулятор 9 установки датчика 10 уровня. Регулятор 3 уровня в это время отключается. На регулятор установки 9 поступает сигнал с датчика 5. На сколько восста66новится уровень воды в створе датчика 5, на столько же и изменится установка датчика 10 регулятором 9 в ctopoay , уменьшения сигнала дЬ. Регулятор установки 9 работаЪт до тех пор, пока уровень воды в конце участка не восстановится, а сигнал с датчика 10 в результате изменения его собственной установки не выйдет на О, после чего система находится в новом установившемся режиме. При увеличении ypoв1 я в конце участка, что происходит при отказе одного из потребителей, сигналы с датчика 5 и с дифференциатора 6, имею-щие знаки 4 , поступают в блок 8 затем в коммутатор 1Z,. коррекции, а который включает в работу регулятор 3 уровня. С дифференциатора 6 сигнал преобразуется в динамическом нелинейном преобразователе 7 и. через элемент 2 сравнения поступает в регулятор 3 уровня. Регулятор 3 уровня уменьшает открытие затвора 4 и уровень воды в начале участка в створе датчика 10 падает. Уменьшение уровня вызывает возникновение сигнала в датчике 10, который, преобразуясь в статическом нелинейном преобразователе 11, компенсирует в элементе 2 сравнения сигнал, поступающий с преобразователя 7, после .чего система уравновешивается. Через время добегания уровень воды в конце участка канала начнет восстанавливаться, а его производная изменит знак + на -. В .этот момент (зоны на графике фиг. 2а зашрихованы) блок 8 коррекции при двух поступаю- щих на него сигналах с разными знаками включает коммутатор 12, который,Vв свою очередь, включает в работу регулятор 9 установки. На сколько восстановится уровень в конце участка, на столько же по сигналу с дат-. чика 5 регулятор 9 уставки уменьшит сигнал с датчика 10. При полном восстановлении уровня воды в конце участка регулятор 9 уставки выводит датчик 10 на отметку уровня, соответствующую новому расходу, поступающему в участок канала, после чего система находится, в новом установившемся режиме. 3otfo pafofnu jftfffjijt тора yftoffftffs)
Фиг. Zcf Онц poSom i pftyjt mopa ifcfmfffoffftu fSJ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня воды на участке ирригационного канала | 1978 |
|
SU697982A1 |
| Устройство для регулирования водоподачи в канале с насосными станциями | 1986 |
|
SU1366995A1 |
| Устройство для регулирования уровня воды в канале | 1989 |
|
SU1725196A1 |
| Система регулирования водораспределения на канале с перегораживающими сооружениями | 1985 |
|
SU1363148A1 |
| Система регулирования волдораспределения открытого канала | 1974 |
|
SU589331A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Система регулирования уровня воды в бьефе оросительного канала | 1985 |
|
SU1357928A1 |
| Система для управления периодическим процессом ферментации | 1989 |
|
SU1725203A1 |
| Устройство для регулирования верхнего и нижнего уровней воды смежных бьефов | 1978 |
|
SU864256A1 |
| Система регулирования водоподачи для оросительного канала | 1985 |
|
SU1348787A1 |
СИСТЕМА РЕГУЛИРОВАНИЯ УРОВНЯ ВОДЫ НА УЧАСТКЕ ИРРИГАЦИОННОГО КАНАЛА, содержащая датчик уровня нижнего бьефа, регулятор установки и последовательно соединенные .датчик j уровня верхнего бьефа, дифференциатор и блок коррекции, второй вход которого подключен к выходу датчика уровня верхнего бьефа, последовательно соединенные элемент сравнения. регулятор уровня и регулирующий орган, отличающаяся тем, что, с целью повышения точности и устойчивости системы, она содержит статический и динамический нелинейные преобразователи и коммутирующий блок, входы которого подключены к соответствующим вЬкодам блока коррекции, а выходы - к управляющим входам регулятора установки и регулятора уровня соответственно, выход дифференциатора соединен с входом динамического нелинейного преобразователя, выход датчика уровня нижнего i бьефа связан с входом статического нелинейного преобразователя, а вхо(Л ды элемента сравнения подключены к выходам статического и динамического нелинейных преобразователей соответственно.
dho
| Система автоматического регулирования уровня воды на участке ирригационного канала | 1974 |
|
SU477390A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования уровня воды на участке ирригационного канала | 1978 |
|
SU697982A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
