со со
sj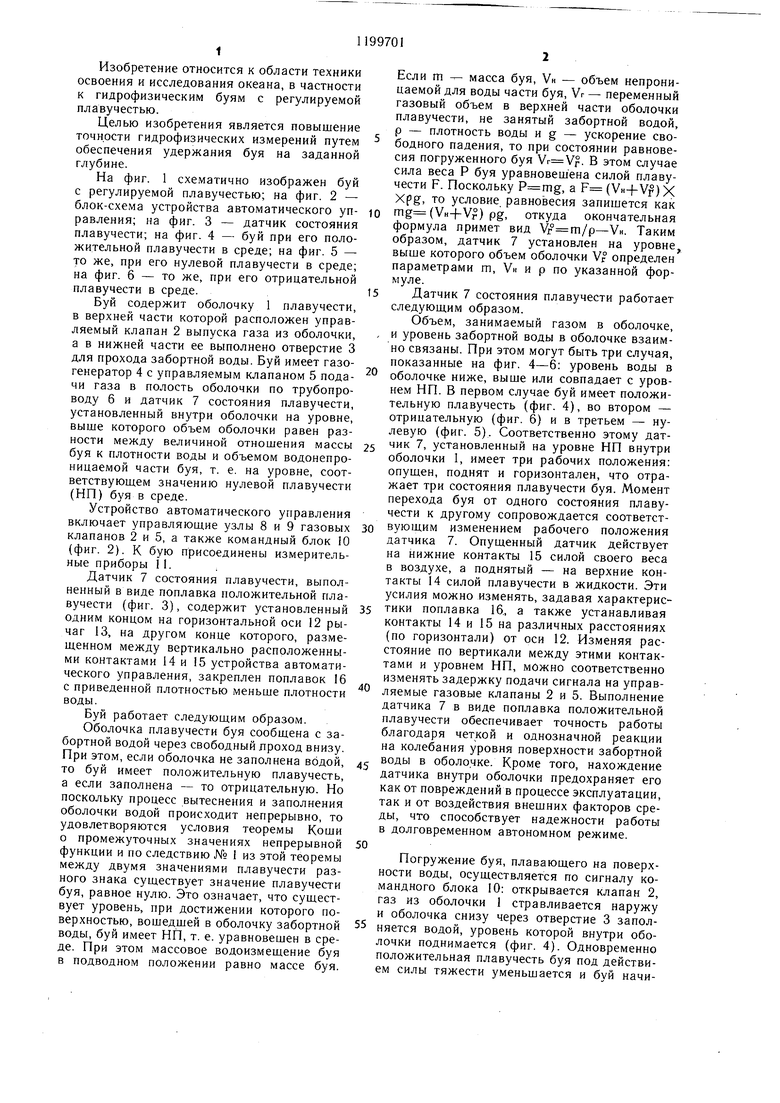
БУЙ С РЕГУЛИРУЕМОЙ ПЛАВУЧЕСТЬЮ, содержащий оболочку плавучести, в верхней части которой расположен управляемый клапан выпуска из нее газа, а в нижней ее части выполнено отверстие для прохода забортной воды, газогенератор с управляемым клапаном подачи газа в полость оболочки и датчик состояния плавучести, имеющий закрепленный одним концом -J с возможностью поворота относительно горизонтальной оси рычаг, на свободном конце которого, взаимодействующем с контактами устройства автоматического управления, закреплен жесткий поплавок, при этом датчик состояния плавучести установлен внутри оболочки, а устройство автоматического управления связано с указанными клапанами, отличающийся тем, что, с целью повышения точности гидрофизических измерений путем обеспечения удержания буя на заданной глубине, рычаг датчика состояния плавучести установлен на уровне, выше которого объем оболочки плавучести буя равен разности между величиной отношения массы буя к плотности воды и объемом водонепроницаемой части буя, а контакты устройства $ автоматического управления расположены (Л вертикально один над другим.
//
. 1
Изобретение относится к области техники освоения и исследования океана, в частности к гидрофизическим буям с регулируемой плавучестью.
Целью изобретения является повышение точности гидрофизических измерений путем обеспечения удержания буя на заданной глубине.
На фиг. 1 схематично изображен буй с регулируемой плавучестью; на фиг. 2 - блок-схема устройства автоматического управления; на фиг. 3 - датчик состояния плавучести; на фиг. 4 - буй при его положительной плавучести в среде; на фиг. 5 - то же, при его нулевой плавучести в среде; на фиг. б - то же, при его отрицательной плавучести в среде.
Буй содержит оболочку 1 плавучести, в верхней части которой расположен управляемый клапан 2 выпуска газа из оболочки, а в нижней части ее выполнено отверстие 3 для прохода забортной воды. Буй имеет газогенератор 4 с управляемым клапаном 5 подачи газа в полость оболочки по трубопроводу 6 и датчик 7 состояния плавучести, установленный внутри оболочки на уровне, выше которого объем оболочки равен разности между величиной отношения массы буя к плотности воды и объемом водонепроницаемой части буя, т. е. на уровне, соответствующем значению нулевой плавучести (НП) буя в среде.
Устройство автоматического управления включает управляющие узлы 8 и 9 газовых клапанов 2 и 5, а также командный блок 10 (фиг. 2). К бую присоединены измерительные приборы II.
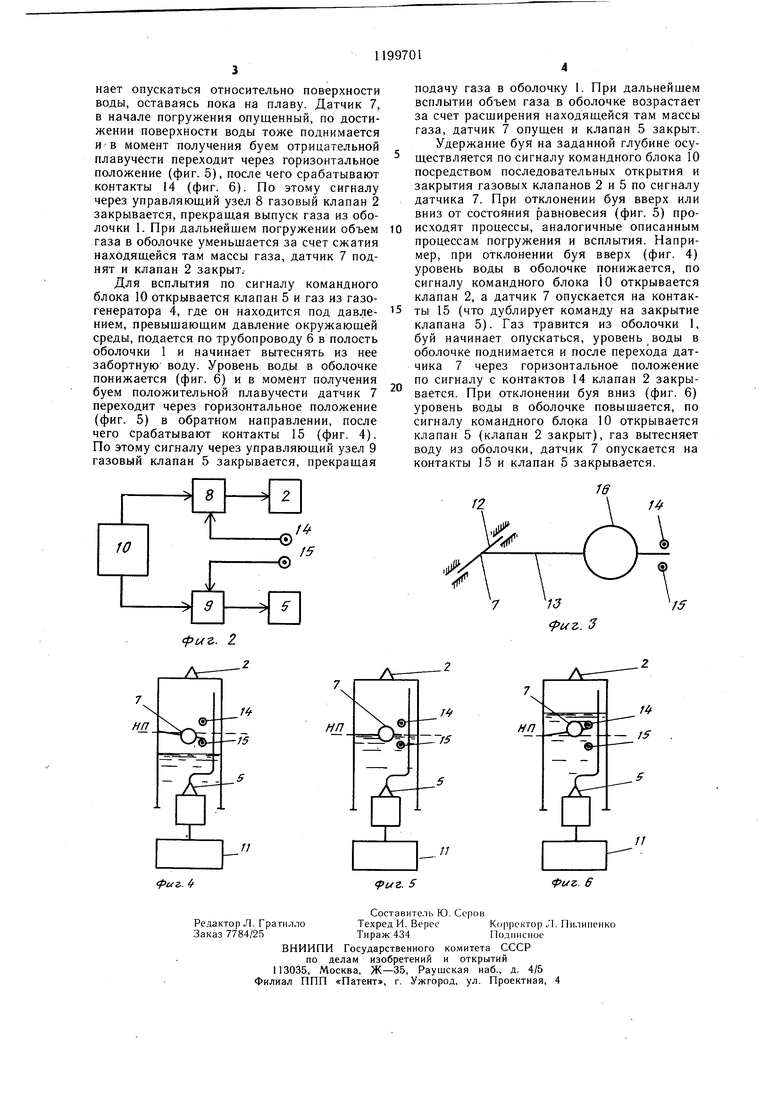
Датчик 7 состояния плавучести, выполненный в виде поплавка положительной плавучести (фиг. 3), содержит установленный одним концом на горизонтальной оси 12 рычаг 13, на другом конце которого, размещенном между вертикально расположенными контактами 14 и 15 устройства автоматического управления, закреплен поплавок 16 с приведенной плотностью меньше плотности воды.
Буй работает следующим образом.
Оболочка плавучести буя сообщена с забортной водой через свободный лроход внизу. При этом, если оболочка не заполнена водой, то буй имеет положительную плавучесть, а если заполнена - то отрицательную. Но поскольку процесс вытеснения и заполнения оболочки водой происходит непрерывно, то удовлетворяются условия теоремы Коши о промежуточных значениях непрерывной функции и по следствию № 1 из этой теоремы между двумя значениями плавучести разного знака существует значение плавучести буя, равное нулю. Это означает, что существует уровень, при достижении которого поверхностью, вошедщей в оболочку забортной воды, буй имеет НП, т. е. уравновешен в среде. При этом массовое водоизмещение буя в подводном положении равно массе буя.
Если m - масса буя, VH - объем непроницаемой для воды части буя, Vr - переменный газовый объем в верхней части оболочки плавучести, не занятый забортной водой, р - плотность воды и g - ускорение свободного падения, то при состоянии равновесия погруженного буя . В этом случае сила веса Р буя уравновешена силой плавучести F. Поскольку , а F (Ун-(-Уг) X Xpg, то условие равновесия запишется как
mg (VH-f-Vr) pg, откуда окончательная формула примет вид Vr m/p-VH. Таким образом, датчик 7 установлен на уровне выше которого объем оболочки Vr определен параметрами ш, VH и р по указанной формуле.
Датчик 7 состояния плавучести работает следующим образом.
Объем, занимаемый газом в оболочке, , и уровень забортной воды в оболочке взаимно связаны. При этом могут быть три случая, показанные на фиг. 4-6: уровень воды в
0 оболочке ниже, выще или совпадает с уровнем НП. В первом случае буй имеет положительную плавучесть (фиг. 4), во втором - отрицательную (фиг. 6) и в третьем - нулевую (фиг. 5). Соответственно этому датчик 7, установленный на уровне НП внутри оболочки 1, имеет три рабочих положения: опущен, поднят и горизонтален, что отражает три состояния плавучести буя. Момент перехода буя от одного состояния плавучести к другому сопровождается соответствующим изменением рабочего положения датчика 7. Опущенный датчик действует на нижние контакты 15 силой своего веса в воздухе, а поднятый - на верхние контакты 14 силой плавучести в жидкости. Эти усилия можно изменять, задавая характеристики поплавка 16., а также устанавливая контакты 14 и 15 на различных расстояниях (по горизонтали) от оси 12. Изменяя расстояние по вертикали между этими контактами и уровнем НП, можно соответственно изменять задержку подачи сигнала на управляемые газовые клапаны 2 и 5. Выполнение датчика 7 в виде поплавка положительной плавучести обеспечивает точность работы благодаря четкой и однозначной реакции на колебания уровня поверхности забортной
воды в оболочке. Кроме того, нахождение датчика внутри оболочки предохраняет его как от повреждений в процессе эксплуатации, так и от воздействия внешних факторов среды, что способствует надежности работы в долговременном автономном режиме.
Погружение буя, плавающего на поверхности воды, осуществляется по сигналу командного блока 10: открывается клапан 2, газ из оболочки 1 стравливается наружу и оболочка снизу через отверстие 3 заполняется водой, уровень которой внутри оболочки поднимается (фиг. 4). Одновременно положительная плавучесть буя под действием силы тяжести уменьщается и буй начи
| Способ регулирования плавучести буя и устройство для его осуществления | 1983 |
|
SU1119918A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
