Изобретение относится к измерительной технике и может быть использовано для исследования параметров короткопериодных внутренних волн в слоях с изменяющимся градиентом плотности при наблюдениях с борта дрейфующего судна.
Известен способ измерения параметров внутренних волн с помощью движущейся системы датчиков, разнесенных в пространстве (1). Данный способ не позволяет исключить из рядов наблюдений погрешность, возникающую из-за качки дрейфующего судна, обусловленной ветровым волнением и волнами зыби. Этот способ не позволяет проводить исследование изменчивости параметров гидрофизических полей на градиентных прослойках в области временных масштабов от единиц секунд до десятков минут, так как даже при отсутствии ветрового волнения погружная часть прибора, опущенного с борта дрейфующего судна, имеет амплитуду вертикальных колебаний более 1 метра, что соизмеримо с вертикальным размером градиентных прослоек.
Известен способ исследования короткопериодных внутренних волн и их взаимосвязи с элементами микроструктуры океана свободно падающими по кабельному тросу зондами (2). Данный способ позволяет устранить влияние качки судна, лежащего в дрейфе, на показания прибора, но не позволяет набрать представительный ряд наблюдений изменчивости короткопериодных внутренних волн на градиентных прослойках, так как методически необходимо после каждого зондирования поднимать зонд и груз, затем опускать груз и вновь производить зондирование.
Эта методика не позволяет производить зондирование чаще, чем через 5-10 минут, что приводит к ограничению ряда экспериментальных наблюдений в его высокочастотной части и по полученных данным можно говорить только о качественных характеристиках исследуемых процессов, и она не позволяет решать поставленную задачу.
Наиболее близким по технической сущности к заявленному способу является способ исследования структурных и гидрофизических характеристик океана с борта судна, описанный в (3). Способ заключается в спуске и подъеме на борт судна регистрирующих приборов с поплавками нейтральной плавучести, размещенных на отдельной измерительной линии, соединенной с забортным тросом и грузом через шарнирные соединения. Однако и описанный способ не позволяет избавиться от возмущающего влияния судна на показания регистрирующих приборов.
Сущность изобретения.
В данной заявке решается задача исследования изменчивости параметров гидрофизических полей на градиентных прослойках, проводимых с борта дрейфующего судна методом стабилизации погружаемого устройства прибора на фиксированном горизонте, что в значительной мере снижает величины погрешностей измерений параметров гидрофизических полей, обусловленных ветровым волнением и волнами зыби, и позволяет регистрировать изменчивость гидрофизических параметров в области масштабов от единиц секунд до десяти минут.
Предлагаемый способ заключается в спуске и подъеме с борта судна регистрирующих приборов с поплавком нейтральной плавучести.
Отличием способа от прототипа является то, что связка регистрирующего прибора и поплавка, имеющих нейтральную плавучесть, соединяется с судном сопровождения демпфирующей системой, состоящей из поддерживающей линии и промежуточного груза, имеющих постоянную времени и собственный период колебаний в динамической среде обтекания значительно больше (в 5-10 раз), чем период качки судна.
Схема постановки измерительного прибора в режиме демпфирования его колебаний приведена на фиг. 1. К погружаемому устройству измерительного комплекса приборов 1 крепится буй 2, положительная плавучесть которого компенсирует массу погружаемого устройства и поддерживающего отрезка кабель-тросовой линии 3. Длина поддерживающего отрезка кабель-тросовой линии рассчитывается в каждом конкретным случае (или подбирается экспериментально при постановке системы), она обычно составляет 10-40 метров. Масса промежуточного груза 4 должна значительно превышать силу сопротивления троса за счет обтекания водой при дрейфе судна. Практически угол отклонения отрезка кабель-троса, поддерживающего груз, не должен превышать 5o. При этих условиях качка судна способствует только вертикальным колебаниям груза 4. Поперечные волны, возникающие при этих колебаниях в линии, затухают обычно на расстоянии нескольких метров от груза и погружаемой части прибора не достигают. При отклонении груза 4 от положения равновесия изменяются подъемная сила Rу и сила сопротивления Rх в каждой точке поддерживающей линии 3. За счет этого не изменяется положение прибора 1 по глубине. При правильном расчете и постановке демпфирующей системы переходной процесс будет иметь постоянную времени и собственный период колебаний, значительно больший, чем период качки судна. Это позволяет добиться демпфирования колебания прибора по глубине.
Из условия равновесия проекции всех сил, действующих на элемент поддерживающей линии, найдем уравнение, определяющие силы и изгиб в каждой точке отрезка L
где  - сила обтекания, действующая на единицу длины троса диаметром d при скорости дрейфа V; γ - масса 1 метра троса; ν - отношение силы обтекания при горизонтальном положении троса в потоке (ν = 0,0167); Tо, αo - усилие и угол касательной к тросу в точке подвеса прибора. Горизонтальная составляющая Tо обусловлена обтеканием корпуса прибора (диаметром dp; длиной lp) и буя (dg, lg) при скорости потока V
- сила обтекания, действующая на единицу длины троса диаметром d при скорости дрейфа V; γ - масса 1 метра троса; ν - отношение силы обтекания при горизонтальном положении троса в потоке (ν = 0,0167); Tо, αo - усилие и угол касательной к тросу в точке подвеса прибора. Горизонтальная составляющая Tо обусловлена обтеканием корпуса прибора (диаметром dp; длиной lp) и буя (dg, lg) при скорости потока V
Tocosαo= 0,6ρV2(dρlp+dвlв) (5)
Вертикальная составляющая силы To зависит от плавучести погружного устройства прибора G с укрепленным буем. Угол αo и величина силы To определяется при этом из простых геометрических соображений. Лучшая стабилизация прибора на заданной глубине обеспечивается в случае, когда точка подвеса поддерживающей линии и груз 4 находятся на одной горизонтали. При реальной скорости дрейфа, превышающей 0,5 - 0,95 м/с, усилие в точке подвески прибора значительно больше, чем масса поддерживающей линии. Кроме того, эта линия еще и выпрямляется силами обтекания. Расчеты, выполненные по соотношениям (1 - 5) для реальных приборов, показывают, что наибольший прогиб поддерживающей линии не превышает 0,2 - 0,4 м при ее длине 10 - 20 м. В этом случае собственные колебания прибора описываются уравнением для моментов всех сил, действующих на элементы системы при отклонении груза 4 в вертикальном направлении.
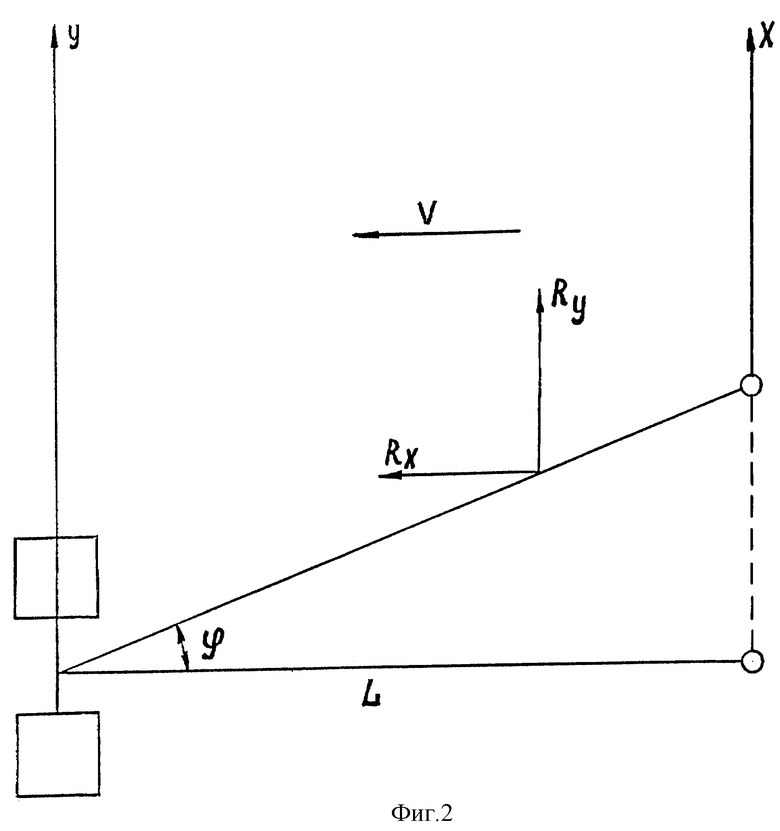
На фиг. 2 показана схема сил, действующих на элементы системы при вертикальных колебаниях груза.
MJ + MD + MDL - MV=0
где My= L2(m+CmWρ)ΔΔϕ - момент инерции прибора (m - его масса),
Cm - коэффициент, равный 0,3 - 0,5,
Wρ - масса вытесненной воды.
 момент демпфирования прибора.
момент демпфирования прибора.
 момент демпфирования поддерживающей системы,
момент демпфирования поддерживающей системы,
Mv= 0,3ρV2dL2sin2ϕ - момент восстанавливающей силы, обусловленной подъемной силой Py и силой сопротивления Px, действующих на каждый элемент поддерживающей линии (фиг. 2).
Таким образом, движение прибора при вертикальных колебаниях груза 4 описывается нелинейным дифференциальным уравнением. Для малых отклонений приближенное решение уравнения может быть получено путем линеаризации нелинейных членов
при условии минимизации интегралов отклонений  соответственно для соотношений (7, 8). В этом случае уравнение собственных колебаний прибора можно записать в следующем виде:
соответственно для соотношений (7, 8). В этом случае уравнение собственных колебаний прибора можно записать в следующем виде:
Период собственных колебаний T и коэффициент затухания α равны соответcтвенно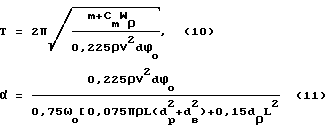
Переходный процесс в демпфирующей системе описывается функцией следующего вида:
Модуль частной демпфирующей системы при вынужденных колебаниях груза 4 с частотой f равен:
- постоянная демпфирования.
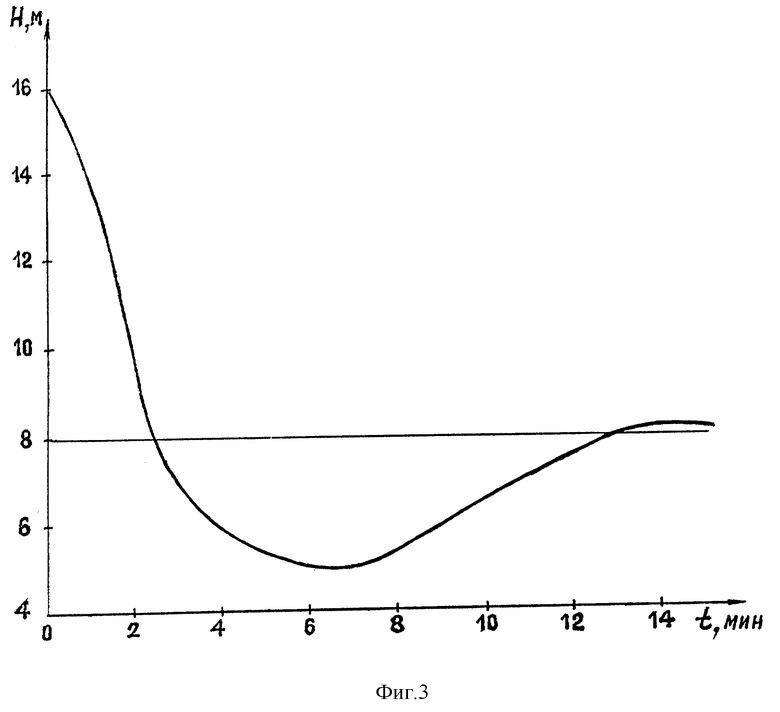
С целью проверки полученных соотношений и эффективности данного метода стабилизации погружной части прибора на фиксированном горизонте были проведены натурные эксперименты на научно-исследовательском судне "Академик Вернадский" во время экспедиции в Атлантическом океане.
Основные данные прибора, буя и поддерживающей линии при проведении эксперимента: масса прибора m = 75 кг, диаметр погружного устройства dp = 0,24 м, объем прибора Wp/ρ = 0,0758 м3, диаметр буя db = 0,54 м, диаметр кабель-троса d = 0,0086 м, масса 1 м кабеля γ = 0,221 кг. Длина поддерживающей линии при экспериментах изменялась от 10 до 40 м. На прибор был установлен вибрационно-частотный датчик давления типа ДДВ-50. При атмосферном давлении среднеквадратическое отклонение показаний датчика в пересчете на глубину составляло 0,38 м. При испытании поддерживающей линии различной длины были сняты переходные процессы движения прибора при изменении глубины груза 4. Типичная кривая такого переходного процесса показана на фиг. 3, длина поддерживающей линии 40 м. Качественно экспериментально полученные переходные процессы хорошо согласуются с решением, полученным в уравнении (12) для собственных колебаний. Параметры ϕo и ωo, при которых решение уравнения близко к реальному переходному процессу, равны соответственно 0,02 рад/с и 1,9•10-5 рад/с. Это адекватно колебаниям груза относительно положения равновесия с амплитудой 1,6 м и скорости изменения начального угла ϕo за период собственных колебаний системы.
Таким образом, параметры ϕo, ωo имеют значения, характерные для реальных условий. Следовательно, полученные уравнения, по крайней мере в первом приближении, правильно описывают динамику демпфирования качки прибора. Экспериментальные исследования описанной системы демпфирования производились следующим образом: в начале эксперимента снимались показания канала глубины прибора на борту судна с целью определения уровня собственных шумов этого канала. По результатам обработки записи датчика давления получены следующие значения для дисперсии и среднеквадратического отклонения показаний
σ2 = 0,15 м2;
σ = 0,38 м.
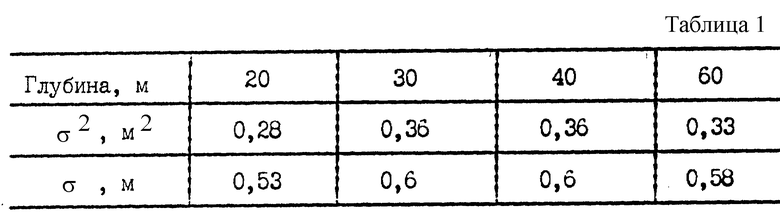
Затем прибор без демпфирующей системы опускался на кабель-тросе на эти же глубины, и на разных горизонтах производились записи показаний датчика глубины с целью определения величины колебаний, обусловленной качкой судна. После обработки записей получены следующие результаты, представленные в табл. 1.
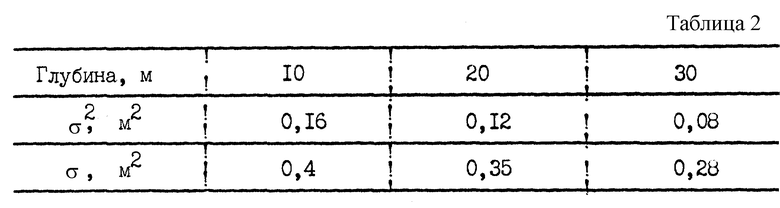
Следующим этапом испытаний была постановка погружаемого устройства прибора в режиме демпфирования колебаний. Для этого к погружаемому устройству крепили пенопластовый буй такого размера, чтобы плавучесть всей системы была близкой к нейтральной. Затем погружаемое устройство с буем опускалось в воду и свободно дрейфовало от судна. На расстоянии 15 м и от погружаемого устройства к кабель-тросу крепился груз, прибор опускался на различную глубину, и после окончания переходных процессов записывались ряды показаний датчика глубины.
По результатам обработки этих записей получены следующие данные, представленные в табл. 2.
По такой же схеме проведены измерения при длине поддерживающей линии 40 м и массе груза 100 кг. Обработка записей глубины показала следующие результаты: σ2, м2=0,15 м2: σ = =0,38 м.
Анализ полученных данных позволяет сделать вывод, что демпфирующая система стабилизирует погружаемое устройство по глубине, в пределах собственных погрешностей канала измерения глубины. В некоторых случаях дисперсия показаний имеет меньшую величину, чем полученная при нахождении прибора на борту судна. Очевидно это объясняется тем, что измеряемая величина находится ближе к середине кванта частотомера и обмен показаний происходит реже.
Таким образом, разработана и экспериментально отлажена система демпфирования погружаемого устройства измерительного комплекса на заданном горизонте. При анализе такой системы демпфирования вполне закономерно возникновение вопроса о том, что нейтральная плавучесть (буй + погружаемое устройство) не будет находиться на фиксированной глубине, а будет отслеживать перемещение изопикнической поверхности, на которой она помещена. Но многократные испытания показали, что усилие, передаваемое на погружаемое устройство от "буксирной линии" при дрейфе судна, неизмеримо больше подъемной силы изопикнической поверхности при скорости дрейфа судна более 0,5 м/с, что реально в открытом море.
Литература:
1. Авторское свидетельство. СССР N 1583847 кл. 01 P 5/00.
2. Дыкман В.З., Ефремов О.И., Коротаев Г.К., Пантелев Н.А. Исследование пульсационного движения в океане в области масштабов короткопериодных внутренних волн. Исследование турбулентой структуры океана. Севастополь. 1975 г., с. 30-40.
3. Авторское свидетельство. СССР N 964541 кл. 01 P 5/00.
Изобретение относится к измерительной технике и может быть использовано для исследования параметров короткопериодных внутренних волн в слоях с изменяющимся градиентом плотности при наблюдениях с борта дрейфующего судна. Способ заключается в спуске и подъеме с борта судна регистрирующих приборов с поплавком нейтральной плавучести. Связке регистрирующего прибора и поплавка придают нейтральную плавучесть. Эту связку соединяют с судном с помощью дрейфующей системы. Эта система состоит из поддерживающей линии и промежуточного груза. Поддерживающая линия и промежуточный груз имеют собственный период колебаний в динамической среде обтекания, который значительно больше (в 5 - 10 раз), чем период качки судна. Технический результат реализации изобретения заключается в обеспечении возможности измерения гидрологических параметров с борта дрейфующего судна в слоях с изменяющимся градиентом плотности при исключении погрешностей, возникающих из-за качки судна, обусловленной ветровым волнением и волнами зыби. 3 ил., 2 табл.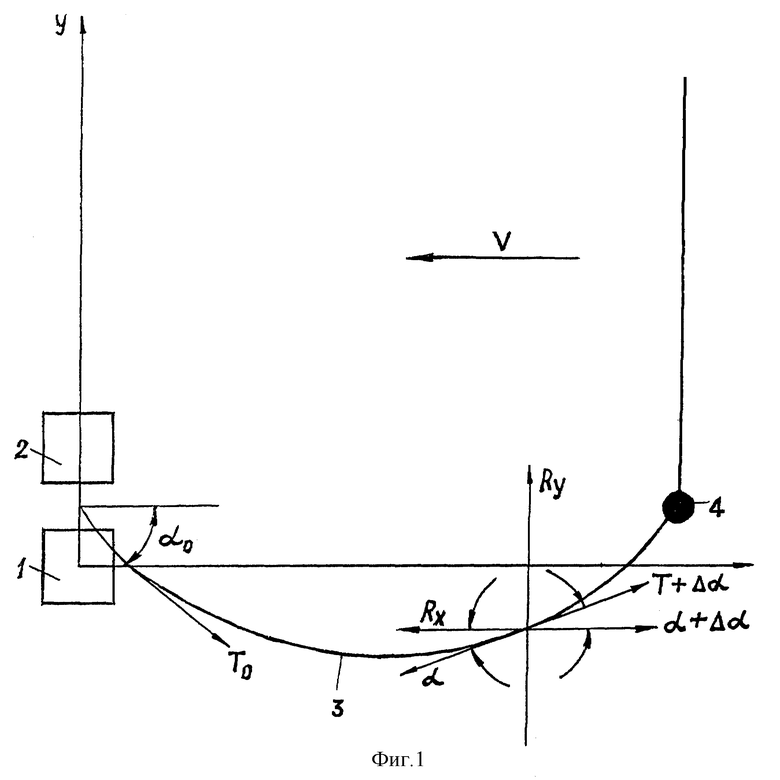
Способ исследования внутренних волн в слоях с изменяющимся градиентом плотности с борта дрейфующего судна в океане, заключающийся в спуске и подъеме с борта судна регистрирующих приборов с поплавком нейтральной плавучести, отличающийся тем, что связка регистрирующего прибора и поплавка, имеющих нейтральную плавучесть, соединяется с судном дрейфующей системой, состоящей из поддерживающей линии и промежуточного груза, имеющих собственный период колебаний в динамической среде обтекания значительно больше (в 5 - 10 раз), чем период качки судна.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Буксируемый комплекс для измерения параметров течения | 1980 |
|
SU964541A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU 13007994A 07.04.1991 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 1862935A 14.06.1932 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ВСЕСОЮЗ!-1АН | 0 |
|
SU375650A1 |

