Изобретение относится к технике подводных исследований в океанологии, гидрографии, океанографии, гидрофизики, гидрохимии и др. океанологических науках, а также синоптике. Оно может быть использовано при создании и разработке техники гидрологических, синоптических, океанологических исследовательских автономных аппаратов и сканирующих автоматических роботов - зондов, автоматических гидрологических буев и станций, а также в технике спасения под водой.
Известны устройства управления плавучестью подводного аппарата, заключающиеся в изменении его водоизмещения путем принятия или откачивания жидкости в балластную емкость (подводные лодки), предварительно заполненную газом под давлением на рабочего горизонта (подводные лодки). Известно также аналогичное устройство осуществления этого способа управления плавучестью [1], содержащее балластную емкость, эластичную емкость, рабочую жидкость и насос для перекачивания жидкости.
Известные устройства предназначены для работы лишь в небольшом диапазоне глубин на заданном горизонте и не пригодны для значительных вертикальных перемещений, так как требуют значительного запаса электрической энергии для перекачивания жидкости для вертикальных перемещений. Это является серьезным недостатком и ограничивает применимость известных решений до одиночных применений.
Известно устройство [2] перемещения аппарата по глубине, заключающееся в изменении плавучести за счет маневрового балласта, включающего герметичный прочный корпус плавучести, содержащий некоторый объем температурно-зависимого рабочего тела, при изменении температуры которого (при нагревании или охлаждении) средой - морской водой, изменяющего свой объем. Существенным недостатком упомянутого известного решение является зависимость от термодинамических параметров внешней среды, т.к. оно рассчитано на энергопитание за счет теплового потока при теплообмене через стенку прочного корпуса аппарата.
Наиболее близким к предлагаемому является решение [3]. Устройство вертикального движения подводного аппарата, включающее изменении его водоизмещения путем воздействия на управляемую геометрию водоизмещающего объема аппарата давлением упругого парогаза низкокипящей жидкости за счет нагревания или охлаждения ее от окружающей морской воды через конструкцию аппарата. Известное устройство переменного водоизмещения, включающее корпус с прочной цилиндрической камерой содержащей генератор газового давления в виде кольцевой полости, заполненной необходимым количеством низкокипящей жидкости и снабженной управляемым клапаном разгрузки, а также шток-поршень, перемещающийся под давлением парогаза и изменяющим водоизмещение аппарата, за счет объема выдвигаемой части штока.
Известное устройство также является инерционным, так как зависит от энергетического состояния водной среды и свойств рабочего тела (низкокипящей жидкости), что практически ограничивает область применения экваториальными акваториями Мирового Океана и теплым временем года, так как температура морской воды определяется поглощением солнечной радиации. Кроме того, скорость теплообмена напрямую зависят от температурных градиентов морской воды и конструкции аппарата, а также от теплопроводности материалов конструкции, что также снижает эффективность энергообмена.
Предлагаемое решение позволяет исключить указанные недостатки, связанные с инерционностью процессов теплообмена, и активировать процесс парообразования за счет интенсификации потребления солнечной энергии с использованием солнечных электрических батарей на основе кремниевых фотопреобразователей, позволяющих преобразовывать солнечную энергию в тепловую через омический электронагреватель, размещенный внутри объема рабочего тела - низкокипящей жидкости, что позволяет увеличить скорость его парообразования за счет активации теплоотдачи от нагревателя и повысить давление парогаза, который используют для изменения объема.
Указанный эффект достигается тем, что в известном устройстве, содержащем генератор газового давления на основе низкокипящей жидкости, помещенной в кольцевой полости, переменного объема, образованной корпусом прочной цилиндрической камеры, и снабженной управляемым клапаном разгрузки, с одной стороны и шток-поршнем, способным перемещаться в цилиндре под давлением парогаза и изменять водоизмещение аппарата, за счет переменного объема, выдвигаемой части штока - с другой стороны; низкокипящую жидкость подогревают в верхней точке траектории движения аппарата омическим нагревателем, встроенным в ее объем, который питают от солнечных батарей, установленных шарнирно одним концом на верхней панели аппарата, и снабженных концевыми поплавками на другом конце для того, чтобы автоматически раскрываться на водной поверхности, кроме того, при перемещении в крайне верхнее положение давлением парогаза шток-поршня, поршень опирается на возвратную пружину, сжимает ее, и фиксируется в верхнем положении управляемым клапаном разгрузки, при этом шток втягивается в цилиндр, что в результате уменьшает водоизмещение аппарата и он погружается, вытянув вдоль оси солнечные батареи под действием плавучести поплавков, а при достижении нижней точки траектории, микроконтроллер через управляемый клапан разгрузки освобождает возвратную пружину, которая перемещает шток-поршень штоком наружу, увеличивая водоизмещение аппарата своим объемом, и аппарат всплывает до поверхности моря, где солнечные батареи снова раскрываются и производят электроэнергию, для выработки парогаза, необходимого для управления водоизмещением, при этом всем процессом изменения водоизмещения управляет микроконтроллер.
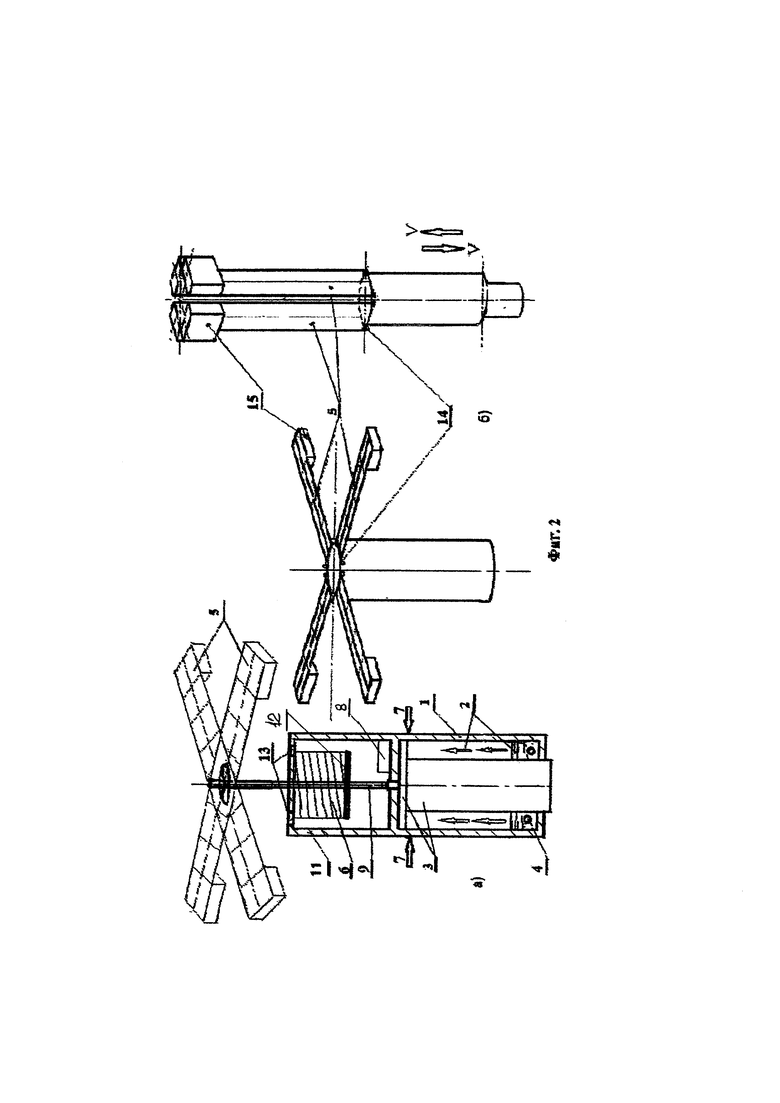
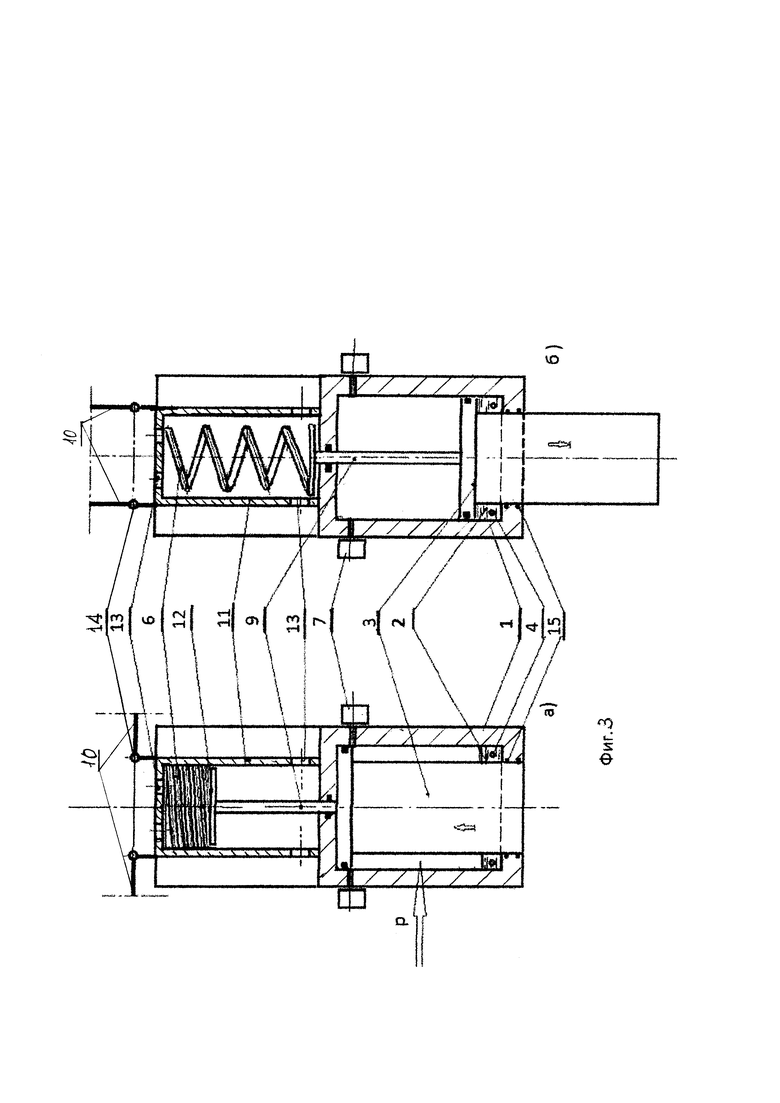
На Фиг. 1 [4] показаны зависимости упругости для разных низкокипящих рабочих тел: в том числе фреонов, сжиженных газов и синтетических хладагентов, используемых в холодильной технике. В зависимости от конкретной задачи конструктор может выбирать подходящую комбинацию. Особый интерес представляет сжиженный углекислый газ - углекислота CO2 величиной своего градиента упругости. На Фиг. 2 и 3 представлена принципиальная схема устройства иллюстрирующего процесс управления водоизмещением подводного аппарата при перемещении шток-поршня и сжатия возвратной пружины под давлением упругих паров выработанных солнечным электронагревателем. Устройство реализуется следующим образом. На Фиг. 2 и 3 а) и б) показана схематично цилиндрическая конструкция устройства переменного водоизмещения 1 для реализации способа в двух стадиях действия способа: стадия а) на поверхности воды, а при погружении или всплытии в тоще воды - б).
Низкокипящую жидкость 2 помещают во внутреннюю полость между шток-поршнем 3 и стенкой прочного цилиндра 1, наружную поверхность которого омывает забортная вода, обмениваясь с низкокипящей жидкостью теплом Q (теплообмен через стенку), охлаждая ее на глубине или нагревая в верхних теплых слоях, при этом на нагреватели 4, которые расположены во внутреннем объеме низкокипящей жидкости, подают напряжение от солнечных батарей 5 Фиг. 2 а), б), которые размещают на верхней панели аппарата, так что они раскрываются на поверхности моря - в верхней точке вертикальной траектории аппарата (Фиг 2а) и б)) и воспринимают солнечный свет, вырабатывая электроэнергию, с помощью которой и нагревают н.к.ж. При достижении достаточной температуры для ее испарения и достижения равновесного давления до расчетного, согласно графика и выбранного рабочего тела [4], так, что давление на шток поршень снизу достигает величины, достаточной для сжатия возвратной пружины 6 и перемещения шток-поршня в крайнее верхнее положение - Фиг. 2а). В верхнем положении, чтобы сохранить неизменной величину минимального водоизмещения для погружения аппарата, когда водоизмещение минимально, шток-поршень фиксируют и удерживают фиксатором 7 (который является также управляемым клапаном разгрузки) Фиг. 2б). Т.к. температура воды меняется в зависимости от акватории, глубины и времени года, что вызывает конденсацию, а следовательно, и изменение давления парогаза и возможную подвижку шток-поршня. Величина управляемого водоизмещения определяется объем выдвигаемой части штока:
ΔV=L×D2π/4,
где L - выход штока и его диаметр D. Задачу сохранения объема ΔV выполняют с помощью фиксаторов 7. В нижней точке траектории аппарата фиксатор 7 освобождает шток-поршень и возвратная 6 пружина перемещает шток наружу Фиг. 2б), увеличивая водоизмещение аппарата на ΔV. Управляет процессом микроконтроллер 8. При нагревании жидкости испаряются, а низкокипящие жидкости испаряются и при отрицательных температурах, при этом давление («упругость») равновесного парогаза в зависимости от температуры бывает весьма значительной. На Фиг. 3 показаны характеристики различных низкокипящих жидкостей. Особый интерес среди них представляет углекислота.
В фазе нагревания шток-поршень 3 упирается через опору 9 в возвратную пружину 6 и сжимает ее внутри опорного стакана 11 через опорный диск 12 давлением парогаза «Р», выдавливая воду через сифонные отверстия 13, когда аппарат находится на поверхности воды и гидростатическое противодавление отсутствует (Фиг. 2а и 3а). В момент полного сжатия пружины фиксатор 7 фиксирует положение шток-поршня. А в нижней точке траектории наоборот: гидростатическое давление, определяемое глубиной, максимальное и когда срабатывает фиксатор 7, возвратной пружине 6 приходится преодолевать это давление (Фиг. 3б). Величина этого усилия F, которое преодолевает пружина, равна:
F=S×h×g×ρ,
где S=πD2/4, h, g и ρ соответственно: S торцевая площадь штока 3 диаметром D, глубина h нижней точки траектории, ускорение свободного падения g и ρ плотность морской воды. Эта величина сможет быть положена в основу инженерных расчетов. Опорный стакан 11 не только держит пружину и шарниры 14 для стыковки с шарнирами 10 солнечных батарей с поплавками 15, но еще снабжен сифонными отверстиями разгрузки 13, которые для впуска забортной воды при сжатии пружины. При движении вверх и вниз панели солнечных батарей, закрепленные шарнирно 14 на верхней панели стакана 11, занимают положение, сложенное вдоль оси и в момент выхода аппарата на поверхность моря раскрываются под действием собственного веса и веса концевых поплавков 15, а при погружении батареи вытягиваются вдоль оси аппарата под действием плавучести этих же поплавков.
Возможность реализации изобретения
Промышленность выпускает большое количество низкокипящих жидкостей. В основном как способ хранения и транспортировки различных газов, необходимых в больших количествах для холодильных машин, т.е. существует индустрия их производства и хранения. Для данного устройства наибольший интерес представляет углекислота или сжатый углекислый газ CO2. Сравнительно дешевый и доступный. Хотя другие газы [4] типа фреонов могут удовлетворить поставленной задаче: балансу энергообмена, гидродинамики движения подводного аппарата и др.
Фотоэлектрические элементы для изготовления солнечных батарей также выпускаются индустриально и постоянно совершенствуются. В основном используют кремниевые элементы из поликристаллического или монокристаллического металла. Их КПД соответственно: на практике составляет 12-25%, и до 25%, в теории же эта цифра приближается к 80-85% [5].
Механические части аппарата как корпус 1, шток-поршень 3, опорный стакан 11 цилиндрическая часть конструкции переменного водоизмещения может быть изготовлена из легированной стали Х18Н10Т [6] по ТУ 1414-033-03455343-2010 http:/www.poisk-ltd.com/ http://www.splav-kharkov.com/ ГОСТ 18482-79 труба; плита, ГОСТ 17232-99. Кроме того, можно использовать сплав АМг-6 с глубоким анодированием, часто употребляемым в океанологии. Особое отношение к возвратной пружине. Ее следует считать с подобающим запасом [7] по ГОСТ-13766 и ГОСТ выносливости, а также определяет основные требования к материалам и технологии изготовления.
Сущность изобретения в том, что в отличие от прототипа и аналогов, которые используют для движения пассивную часть солнечной энергии, рассеянную в толще океана, и потому имеющую не значительный потенциал относительно рабочего тела, то использование солнечного приемника с электронагревателем, позволяет сконцентрировать солнечное тепло в объеме рабочего тела, увеличивая преобразование его в парогаз более высокого давления.
Список использованных источников
1. Комаров В.С, Ястребов B.C. АС СССР №1519102; B63B 21/52 от 26.11.1987 г.
2. Морозов А.К. Патент РФ №2081782; B63G 8/24, 22/00 от 17.09.1997 г.
3. Комаров В. С., Морозов А.К. Патент РФ №2124457; B63B 22/00; от 10.01.1999 г.
4. http://www.xiron.ru/; Холодильное оборудование от Компании «Ксирон-Холод»
5. http://www.sun-battery.biz/ Принцип работы и устройство солнечной батареи.
6. http://poisk-ltd.com/ ТУ 1414-033-03455343-2010.
7. http://www.stamo.ru/sites/ Пружины сжатия – STAMO.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ передвижения по вертикали подводного аппарата за счет солнечной энергии, использующий управление его плавучестью | 2016 |
|
RU2664613C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЛАВУЧЕСТЬЮ ПОДВОДНОГО АППАРАТА РОБОТА-ЗОНДА | 2011 |
|
RU2482001C2 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ И ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529940C2 |
| Подводная буровая установка | 1986 |
|
SU1448022A1 |
| Вездеходный транспортный робот | 2016 |
|
RU2615808C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТЕМПЕРАТУРНОГО ГРАДИЕНТА МОРСКОЙ СРЕДЫ | 1998 |
|
RU2124457C1 |
| САМОХОДНЫЙ НАДВОДНО-ПОДВОДНЫЙ ОСТРОВ | 2009 |
|
RU2399549C1 |
| "Подводный автономный аппарат "Цейдон" | 1989 |
|
SU1761581A1 |

Изобретение относится к области судостроения, в частности к подводным аппаратам, используемым при решении исследовательских и поисковых задач в незамерзающих акваториях морей и внутренних водоемов. Предложено устройство для передвижения по вертикали подводного аппарата за счет солнечной энергии, использующее управление его плавучестью, воздействуя на его водоизмещающий объем давлением упругого парогаза низкокипящей жидкости, помещенной между подвижными частями водоизмещающей конструкции подводного аппарата. Процесс испарения рабочего тела активируется путем повышения его температуры за счет теплоотдачи от солнечной батареи, что позволяет увеличить скорость процесса испарения рабочего тела и повысить давление парогаза, которое используют для управления изменением водоизмещающего объема. Изменение управляемого объема получают за счет раздвижной водоизмещающей конструкции и фиксации ее крайних положений. Технический результат заключается в улучшении эксплуатационных характеристик подводного аппарата. 3 ил.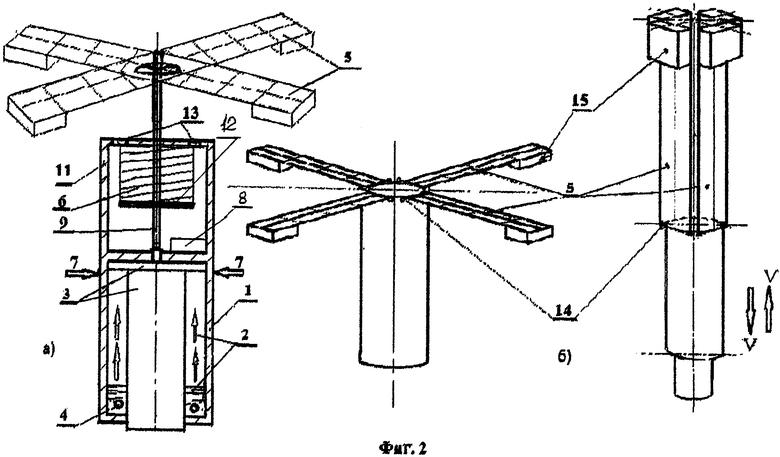
Устройство для реализации способа передвижения по вертикали подводного аппарата за счет солнечной энергии, использующее управление плавучестью аппарата, содержащее генератор газового давления на основе низкокипящей жидкости, помещенной в кольцевой полости, переменного объема, образованной корпусом прочной цилиндрической камеры и снабженной управляемым клапаном разгрузки с одной стороны и шток-поршнем, способным перемещаться в цилиндре под давлением парогаза и изменять водоизмещение аппарата за счет переменного объема выдвигаемой части штока - с другой стороны, отличающееся тем, что низкокипящую жидкость подогревают в верхней точке траектории движения аппарата омическим нагревателем, встроенным в ее объем, который питают от солнечных батарей, установленных шарнирно одним концом на верхней панели аппарата и снабженных концевыми поплавками на другом конце для того, чтобы автоматически раскрываться под собственным весом на водной поверхности, кроме того, при перемещении шток-поршня в крайне верхнее положение под давлением парогаза поршень опирается через опору на возвратную пружину, сжимает ее, запасая в ней энергию деформации, и фиксируется в верхнем положении управляемым фиксатором клапана разгрузки, при этом шток втягивается в цилиндр, что в результате уменьшает водоизмещение аппарата и он погружается, вытянув вдоль оси солнечные батареи под действием плавучести поплавков, а при достижении нижней точки траектории микроконтроллер через фиксатор управляемого клапана разгрузки освобождает возвратную пружину, которая перемещает шток-поршень штоком наружу, увеличивая водоизмещение аппарата своим объемом, и аппарат всплывает на поверхность моря, где солнечные батареи снова раскрываются и производят электроэнергию для выработки парогаза, необходимого для управления водоизмещением, при этом всем процессом изменения водоизмещения управляет микроконтроллер.
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТЕМПЕРАТУРНОГО ГРАДИЕНТА МОРСКОЙ СРЕДЫ | 1998 |
|
RU2124457C1 |
| US 4183316 A, 15.01.1980 | |||
| СКАНИРУЮЩИЙ ТЕПЛОВОЙ БУЙ | 1998 |
|
RU2137662C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2081782C1 |
| ТЕПЛОВОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА | 1998 |
|
RU2142385C1 |
| US 4031581 A, 28.06.1977 | |||
| ЭНЕРГОНЕЗАВИСИМЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ | 2015 |
|
RU2584954C1 |

