Широко известна, так называемая, динамическая коррекция электромеханических систем, заключающаяся в улучшении динамических характеристик корректируемой системы путем включения в измерительнопреобразовательный тракт системы всномогательного звена корректирующего преобразователя. Наибольшее распространение нолучили корректирующие преобразователи последовательного включения на базе пассивного четырехполюсника.
Однако им присущ ряд недостатков, которые обусловлены, в частности, практическими трудностями в реализации пассивного четырехполюсника с требуемой передаточной функцией, снижением чувствительности схемы при коррекции и сильно выраженной зависимостью чувствительности схемы от коэффициента усиления усилителя.
С целью устранения указанных недостатков, предлагается в устройстве для корректирования динамических характеристик электромеханических систем применить корректирующий преобразователь, состоящий из пассивного четырехполюсника и усилительного устройства, для которого этот последний играет роль звена обратной связи.
В качестве усилительного устройства предлагается использовать устройство для измерения первичных значений электродвижущих сил и токов, описанное в авт. св. № 107961 и содержащее в качестве основного элемента синхронный генератор, нитаемый измеряемым напряжением и напряжением компенсации, и питающий демодулятор, управляемый током отдельного синхронного генератора, механически связанного с валом первого генератора.
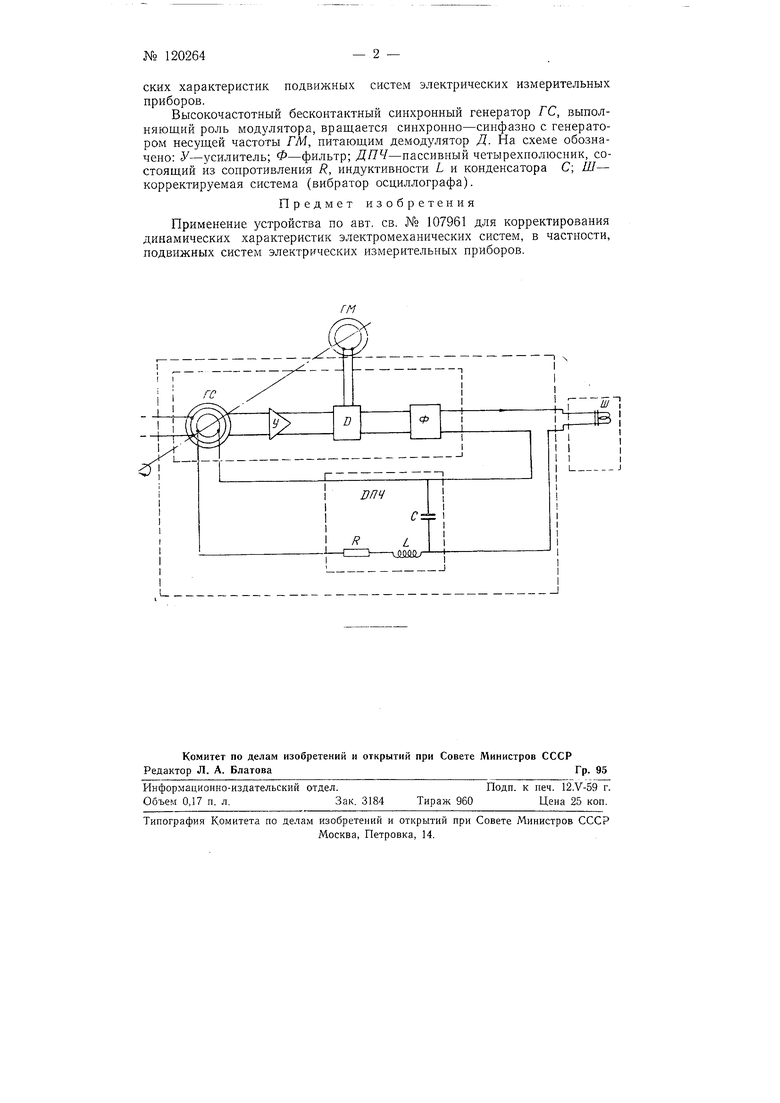
На чертеже показана принципиальная электрическая схема корректирующего преобразователя, в частности, для корректировки динамических характеристик подвижных систем электрических измерительных приборов.
Высокочастотный бесконтактный синхронный генератор ГС, выполняющий роль модулятора, вращается синхронно-сиифазно с генератором несущей частоты ГМ, питающим демодулятор Д. На схеме обозначено: У-усилитель; Ф-фильтр; ДПЧ-пассивный четырехполюсник, состоящий из сопротивления R, индуктивности L и конденсатора С; Ш- корректируемая система (вибратор осциллографа).
Предмет изобретения
Применение устройства по авт. св. № 107961 для корректирования динамических характеристик электромеханических систем, в частности, подвижных систем электрических измерительных приборов.