Изобретение относится к области приборостроения и может быть использовано, например, в неконтактных гироскопах и магнитных подшипниках.
Известны неконтактные гироскопы, в которых вращающийся сферический ротор поддерживается системой газового, магнитного или электростатического подвеса [1-3] . Для определения углового положения ротора относительно корпуса гироскопа используются датчики угла, например, в виде четырехполюсных электромагнитов, обмотки которых включаются в мостовую схему, питаемую переменным напряжением. Выходное напряжение, снимаемое, например, с диагонали схемы, пропорционально углу рассогласования оси вращения ротора с осью симметрии корпуса. Для приложения к свободному ротору корректирующих моментов применяют четырехполюсные датчики момента (аналогичные датчикам угла) либо тормозного типа (основанные на действии вихревых токов [1]), либо реактивного типа (когда к ротору прилагается тяговая сила электромагнита [2, 3], расположенного напротив полюсного выступа или отверстия).
За прототип принят гироскоп [3], в котором с полярными отверстиями в ферромагнитном роторе взаимодействуют два четырехполюсных электромагнита, один из которых может служить датчиком угла, а другой - датчиком момента. Недостатком такой системы является то, что такие датчики угла и момента чувствительны к поступательным смещениям ротора. Это приводит к снижению точности гироскопа. Для исключения, например, погрешности датчика угла от поперечного (относительно оси вращения ротора) смещения используют последовательное соединение обмоток датчиков на обоих полюсах ротора, в результате чего сигналы от поступательных смещений компенсируются. Но чтобы использовать такую систему из двух четырехполюсных электромагнитов в качестве датчика момента приходится применять известные приемы либо разделения функций измерения смещения и создания силы по времени [2, рис. 1.34], либо питания системы от двух источников переменного напряжения, частоты которых существенно различаются друг от друга [2, рис. 1.44], при этом информация о смещении благодаря использованию фильтра снимается в виде сигнала высокой частоты, а управляющий силовой сигнал поступает в систему на низкой частоте. Однако такие решения приводят, во-первых, к существенным усложнениям схем управления гироскопами, а во-вторых, к взаимному влиянию силовых и измерительных полей, особенно в ферромагнитных устройствах, в которых магнитная проницаемость сердечников магнитопроводов зависит от величины токов, управляющих силовым воздействием на ротор.
Целью изобретения является совмещение функций датчика угла и датчика момента, повышение точности измерения и приложения силы при использовании простой схемы и питания от опорных источников одной частоты.
Поставленная цель достигнута благодаря тому, что в диагональ мостовой схемы, образованной силовыми элементами, например, в виде электромагнитов и опорными (прямым и инвертированным) источниками напряжения, содержащую усилительно-преобразовательный блок, введен датчик тока, соединенный с первым входом вычитающего устройства, второй вход которого через регулятор амплитуды и интегрирующее звено подключен к выходу усилительно-преобразовательного блока, первый вход блока соединен с одним из источников опорного напряжения, при этом второй вход блока подключается к источнику сигнала, пропорционального моменту, приложенному к телу, а выход вычитающего устройства является источником сигнала, например, от углового смещения тела (ротора).
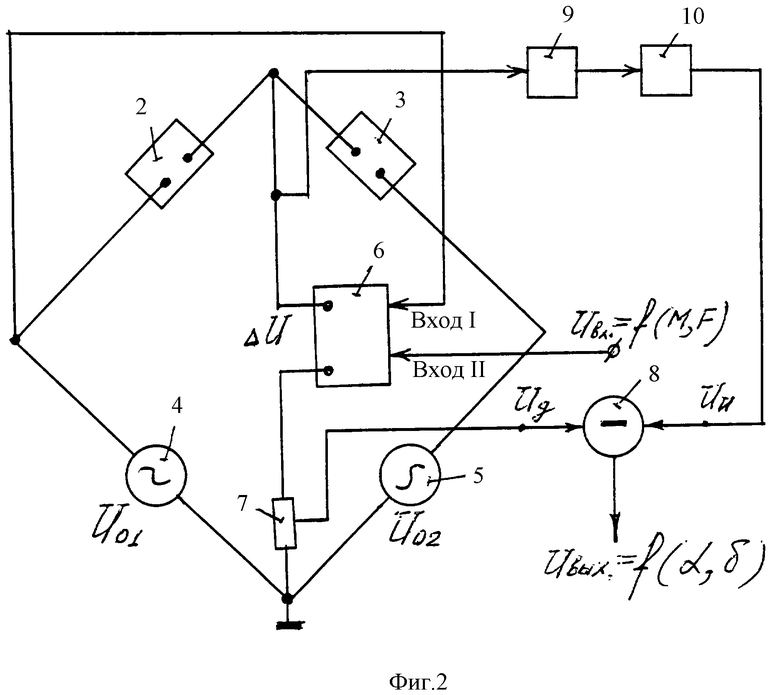
На фиг. 1 представлена схема взаимодействия силовых элементов - электромагнитов с телом - ротором, которое имеет возможность поступательного δ или углового α смещения.
На фиг.2 показана схема включения силовых электромагнитов для реализации измерения смещения тела.
На фиг. 3 представлена временная диаграмма напряжений и токов в предложенном устройстве.
Тело 1 (например, ферромагнитный ротор, фиг.1) имеет выступ, взаимодействующий с электромагнитами 2 и 3, обмотки которых имеют соответственно индуктивности L1 и L2, изменяющиеся при поступательном δ или угловом α смещении ротора. Электромагниты 2 и 3 включены (фиг.2) в два плеча мостовой схемы, два других плеча которой составлены из прямого 4 и инвертированного 5 источников переменного (например, импульсного) напряжения. К диагонали мостовой схемы подключен выход усилительно-преобразовательного блока 6, последовательно с которым введен датчик тока 7 (например, в виде резистора). Этот датчик соединен с первым входом вычитающего устройства 8, второй вход которого через регулятор амплитуды 9 и интегрирующее звено 10 подключен к выходу блока 6. Первый вход блока 6 соединен с одним из источников опорного напряжения, а второй вход этого блока подключается к источнику сигнала Uвх= f(M, F), пропорционального моменту (силе), приложенному к телу. При этом выход вычитающего устройства 8 является источником сигнала Uвх=f(α, δ) об угловом α или поступательном δ смещении тела.
Введем значения реактивных сопротивлений индуктивностей L1 и L2 обмоток электромагнитов в комплексном виде:
где х0 - номинальное значение реактивных сопротивлений, смещение (например, угловое) тела по отношению к полному рабочему смещению (углу α).
смещение (например, угловое) тела по отношению к полному рабочему смещению (углу α).
Тогда напряжение Uд (с датчика 7) пропорционально току I в диагонали моста:
U0 - опорное напряжение,
ΔU - напряжение на выходе блока 6.
Для исключения влияния на показания датчика смещения силового напряжения ΔU необходимо введение с помощью вычитающего устройства 8 компенсирующего сигнала Iк, удовлетворяющего решению уравнения:
из которого следует
Iк=ΔUK, (4) передаточный коэффициент цепи "выход блока 6 - вход вычитающего устройства 8".
передаточный коэффициент цепи "выход блока 6 - вход вычитающего устройства 8".
Коэффициент К может быть реализован в общем случае при использовании регулятора амплитуды 9 для установки значения  и интегрирующего звена 10 для реализации функции [j] . В частности, регулятор амплитуды может быть выполнен в виде переменного резистора в диагонали моста, сопротивление которого устанавливается равным
и интегрирующего звена 10 для реализации функции [j] . В частности, регулятор амплитуды может быть выполнен в виде переменного резистора в диагонали моста, сопротивление которого устанавливается равным  Интегрирующее звено 10 может быть реализовано в виде RC-цепи в составе операционного усилителя.
Интегрирующее звено 10 может быть реализовано в виде RC-цепи в составе операционного усилителя.
Усилительно-преобразовательный блок 6 представляет собой традиционный усилитель с преобразованием сигнала по схеме ''демодулятор - корректирующее звено - модулятор'', необходимой для введения в силовой сигнал составляющей, пропорциональной скорости смещения тела (для демпфирования его колебаний). Вход 1 блока 6, таким образом, служит для подачи опорного напряжения, обеспечивающего работу ключевых схем демодулятора и модулятора. Если тело 1 демпфировано другими средствами (например, помещено в вязкую среду), то необходимость в указанном преобразовании сигнала с помощью входа 1 отпадает.
На фиг.3 показаны временные диаграммы напряжений и токов в предложенном устройстве при использовании опорных источников U01 и U02. Как следует из диаграмм, U02 инвертировано по отношению к U01, напряжение Uд с датчика тока имеет практически прямоугольную форму ввиду индуктивного характера сопротивлений обмоток электромагнитов, напряжение Uи с выхода интегратора также имеет прямоугольную форму.
Отметим, что предложенное устройство, совмещающее функции датчика смещения и момента (силы), может быть реализовано и для силовых элементов в виде обкладок конденсаторов, например, в электростатическом гироскопе.
Источники информации
1. Инерциальная навигация. Анализ и проектированием. /Под ред. К.Ф. О'Доннела. Пер. с англ. М.: Наука, ГРФМЛ, 1969, стр.91-92.
2. Осокин Ю.А. и др. Теория и применение электромагнитных подвесов. М.: Машиностроение, 1980, стр.257-258.
3. Патент РФ 2064163. Гироскоп-акселерометр со сферическим ротором в магниторезонансном подвесе, кл. G 01 С 19/00, 1996 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| НЕКОНТАКТНЫЙ ПОДВЕС РОТОРА | 2013 |
|
RU2545310C2 |
| ШПИНДЕЛЬ | 2008 |
|
RU2370344C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОЛОЖИТЕЛЬНОЙ ЖЕСТКОСТИ ТЯГОВОЙ ХАРАКТЕРИСТИКИ ЭЛЕКТРОМАГНИТА | 2008 |
|
RU2374712C1 |
| ДЕМПФЕР ДЛЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ УСТРОЙСТВ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2193122C2 |

Изобретение относится к приборостроению и может быть использовано в устройствах, содержащих системы магнитного или электростатического подвеса тела (например, вращающегося ротора), в частности, в неконтактных гироскопах и магнитных подшипниках. Датчик содержит мостовую схему, два плеча которой составлены из источников прямого и инвертированного напряжений, два другие - из силовых элементов. К диагонали схемы подключен выход усилительно-преобразовательного блока и датчик тока, соединенный с первым выходом вычитающего устройства, второй выход которого через регулятор амплитуды и интегрирующее звено подключен к выходу усилительно-преобразовательного блока. Первый вход блока соединен с одним из источников опорного напряжения, при этом второй вход блока подключается к источнику сигнала, пропорционального моменту (силе), приложенному к телу, а выход вычитающего устройства является источником сигнала об угловом (или поступательном) смещении тела. Техническим результатом является повышение точности измерения смещения тела при упрощении схемы, питаемой от опорного источника переменного напряжения одной частоты. 3 ил.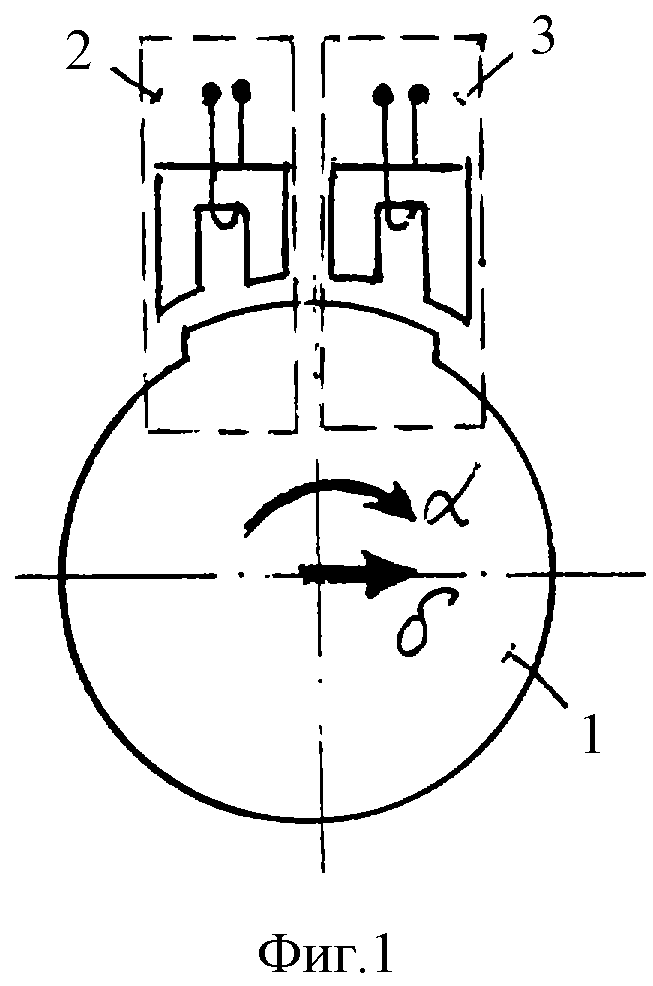
Совмещенный датчик момента и смещения тела, содержащий мостовую схему, два плеча которой составлены из опорных источников переменного напряжения, два другие - из силовых элементов, например, в виде электромагнитов, усилительно-преобразовательный блок, выход которого подключен к диагонали схемы, отличающийся тем, что в диагональ схемы введен датчик тока, соединенный с первым входом вычитающего устройства, второй вход которого через регулятор амплитуды и интегрирующее звено подключен к выходу усилительно-преобразовательного блока, первый вход блока соединен с одним из источников опорного напряжения, при этом второй вход блока подключается к источнику сигнала, пропорционального моменту, приложенному к телу, а выход вычитающего устройства является источником сигнала, например, об угловом смещении тела.
| RU 2064163 С1, 20.07.1996 | |||
| ОСОКИН Ю.А | |||
| и др | |||
| Теория и применение электромагнитных подвесов | |||
| - М.: Машиностроение, 1980, с.257-258 | |||
| US 4361054 A, 30.11.1982 | |||
| US 3678765 А, 25.07.1972. |

