Изобретение относится к области машиностроения и может быть использовано в системах автоматического управления.
Целью изобретения является повы шение точности механизма.
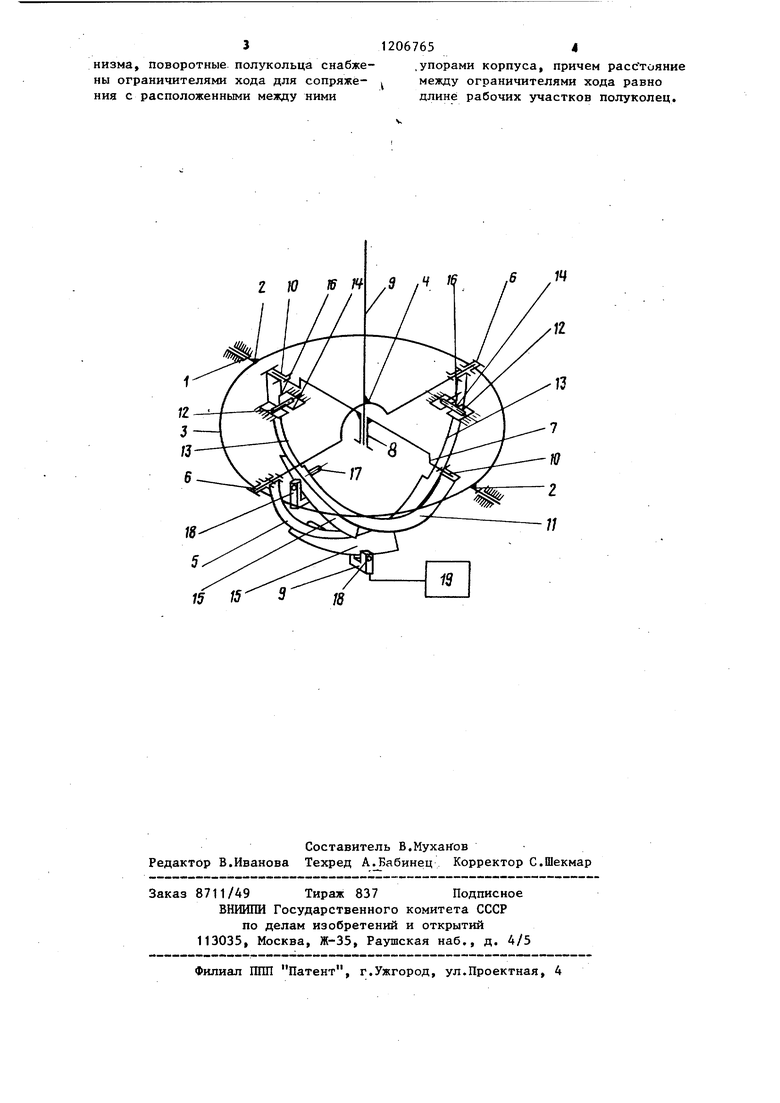
На чертеже представлено предлагмое устройство.
Механизм управления содержит установленное в корпусе 1 с возмож ностью вращения на первой паре диаметрально расположенных опор 2 колцо 3, подвижный элемент 4 и первое поворотное полукольцо 5, шарнирно установленные в кольце 3 на второй паре диаметрально расположенных опор 6, перпендикулярных первой па опор 2, опорньш элемент 7, установленный на подвижном элементе 4 с вможностью вращения вокруг оси 8, .которая совпадает с осью симметрии подвижного элемента 4, причем подвижный элемент 4 жестко связан с эментом 9 управления, а опорньй элемент 7 снабжен третьей парой диаме рально расположенных опор 10, перпдикулярных оси 8 вращения опорного элемента 7, на которых шарнирно установлено второе поворотное полукольцо 11, упоры 12, на корпусе 1 сопряженные с направляющими 13 поворотных полуколец 5 и 11 своими проточками 14, размещенными в двух взаимно перпендикулярных плоскостя при этом оси симметрии поворотных полуколец 5 и 11 и подвижного элемента 4 проходит через центр кольца 3, а полукольца 5 и 11 снабжены рабочими участками 15.
Поворотные полукольца 5 и 11 снабжены ограничителями 16 хода для сопряжения с расположенными между ними упораг-ш 12 корпуса 1, причем расстояние между ограничителями 16 хода для сопряжения с расположенными между ними упорами 12 корпуса 1, причем расстояние между ограничителями 16 хода равно длине рабочих участков 15 полуколец 5 и 11. Рабочие участки 15 полуколец 5 и 11 расположены между источниками 17 излучения и приемниками 18 преобразователей 19 механического перемещения в электрический сигнал, поступаюпщй на объект управления (не показан).
Механизм управления работает следующим образом.
При отклонении элемента 9 управления на некоторый угол происходит поворот полуколец 5 и 11, распдложе ных в.двух взаимно перпендикулярных плоскостях. При этом рабочие участки 15 полуколец 5 и 11 перекрывают в большей или меньшей степени свет от источников 17 излучения, поступающий в приемники 18.
Таким образом, при перемещении элемента 9 управления изменяется величина электрических сигналов на выходе преобразователей 19, поступающих на объект управления.
Рабочая зона перемещения элемента 9 управления устанавливается поворотом полуколец 5 и 11 в пределах, определяемых ограничителями 16 хода, сопряженных с упорами 12, что обеспечивает большую точность управления и исключает кинематичес кие погрешности устройства.
Формула изобретения
Механизм перемещения курсора, содержащий установленное в корпусе с возможностью вращения на первой паре диаметрально расположенных опор кольцо, подвижньш элемент и первое поворотное полукольцо, шарнирно установленные в кольце на второй паре диаметрально расположенных опор, перпендикулярных первой паре опор, опорный элемент, размещенный на подвижном элементе с возможностью вращения относительно оси, которая совпадает с осью симметрии подвижного элемента, причем подвижньш элемент жестко связан с элементом управления, а опорный элемент снабжен третьей парой диаметрально расположенных опор, перпендикулярных оси вращения опорного элемента, на которых шарнирно установлено второе поворотное полукольцо, упоры на корпусе, сопряженные с направляющими поворотных полуколец своими проточками, размещенными в двух взаимно- перпендикулярных плоскостях, при этом оси симметрии поворотных полуколец и подвижного элемента проходят через центр кольца, а поворотные полукольца снабжены рабочими участками, отличающийся тем, что, с целью повышения точности меха312067654
низма, поворотные, полукольца снабже- .упорами корпуса, причем расс тояние ны ограничителями хода для сопряже- между ограничителями хода равно ния с расположенными между ними длине рабочих участков полуколец.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления перемещением курсора | 1978 |
|
SU729583A1 |
| НАКАТНАЯ ГОЛОВКА | 1995 |
|
RU2076786C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Устройство Дагиса для прижима полуколец к цилиндрическим поверхностям | 1990 |
|
SU1815096A1 |
| Устройство для изготовления труб с кольцевыми гофрами | 1984 |
|
SU1232331A1 |
| МЕХАНИЗМ ЗАЖИМА ПРУТКОВ И ТРУБ НА КЛИНОВЫХ НОЖНИЦАХ | 1999 |
|
RU2168399C2 |
| УСТРОЙСТВО ДЛЯ НАПЫЛЕНИЯ ТОНКОПЛЕНОЧНЫХ ПОКРЫТИЙ НА СФЕРИЧЕСКИЕ РОТОРЫ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2014 |
|
RU2555699C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2061612C1 |
| Устройство для выполнения гимнастических упражнений | 1982 |
|
SU1263267A1 |
Изобретение относится к области машиностроения и может быть использовано в системах автоматического управления. Целью изобретения является повышение точности механизма. Механизм перемещения курсора содержит установленное в корпусе на двух опорах кольцо, два установленных внутри него полукольца на взаимно перпендикулярных опорах, опорный элемент и подвижный элемент, связанный с элементом управления, упоры на корпусе, сопряженные с направляющими полуколец. Точность механизма повьш1ается за счет снабжения полуколец ограничителями хода для сопряжения с упорами корпуса, причем расстояние между ограничителями хода Q равно длине рабочих участков полу- колец. 1 ил. (/}
| Патент США № 3789218, кл | |||
| Катодное реле | 1921 |
|
SU250A1 |
| Механизм управления перемещением курсора | 1978 |
|
SU729583A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
