Изобретение относится к назем- ным транспортным средствам и может быть использовано в типовых конструкциях ходовой части с зависимой подвеской, эксплуатируемых в .широком диапазоне скоростей.
Целью изобретения является улучшение управляемости транспортного средства путем устранения боковых вибраций управляемых колес.
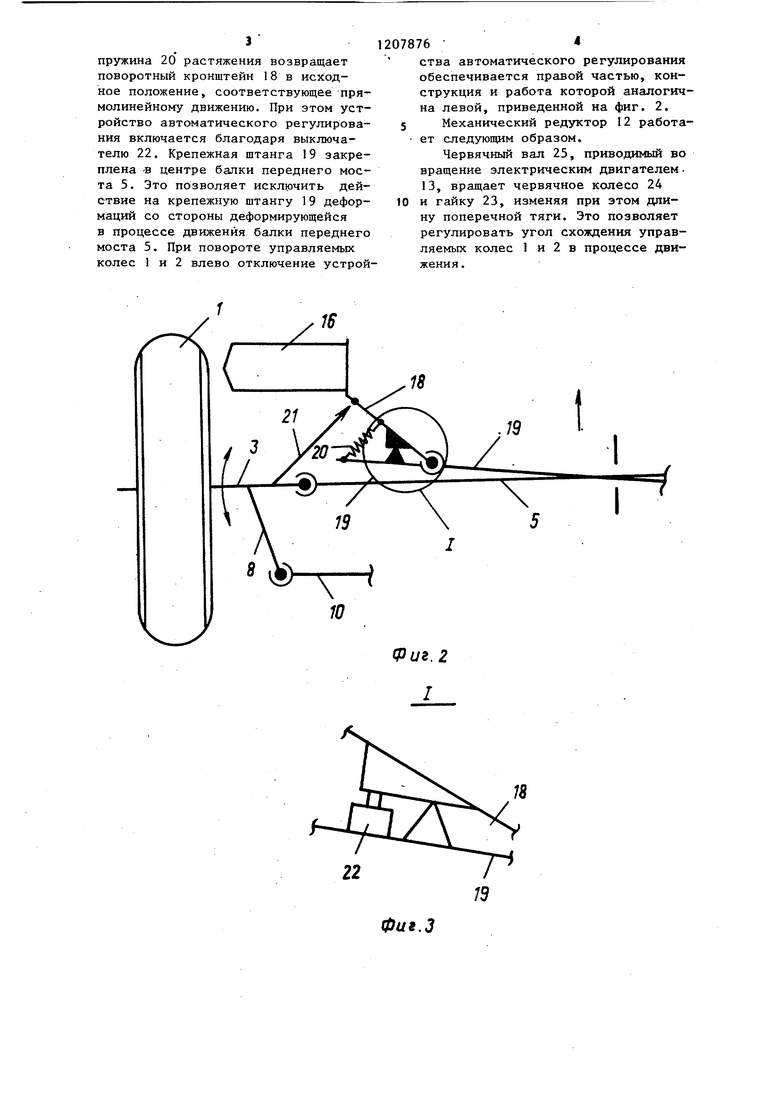
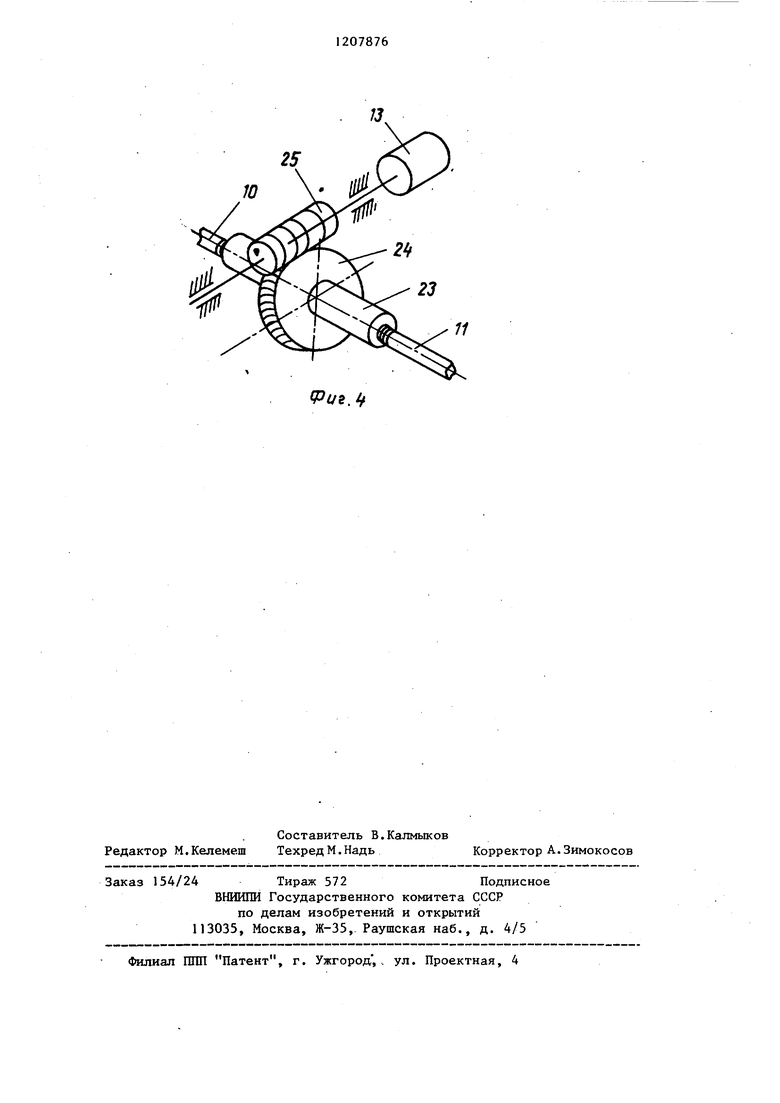
На фиг. 1 схематически показано устройство автоматического регулирования, общий вид; на фиг. 2-- кинематическая схема установки индуктивных датчиков; на фиг. 3 - расположение выключателя, отключающего предлагаемое у стройстбо (узел I на фиг. 2), на фиг. 4 - кинематическая схема механического редук - тора.
Управляемые колеса 1 и 2 установлены на поворотных кулаках 3 и 4, шарнирно соединенных с балкой переднего моста 5 с помощью щквор- ней 6 и 7. К поворотным кулакам 3 и 4 жестко закреплены рулевые рычаги 8 и 9, щарнирно соединенные с частями 10 и 11 разрезной поперечной тяги, между которыми уста- новлен регулирующий ее длину механический редуктор 12. Последний мехаршчески связан с ротором электрического двигателя 13, питаемого электрическим усилителем 14, вход которого электрически соединен с выходом уравновешенного электрического моста 15. Уравновешенный электрический мост 15 электрически соединен с индуктивными датчиками 16 и 17, один из которых установлен на поворотном кронштейне 18, содержащем упор, шарнирно соединенный с крепежной штангой 19. Последняя; жестко закреплена в центре балки переднего моста 5 с целью исключения деформаций. Один конец пружины 20 растяжения закреплен на поворотном кронштейне 18,йругой - на крепежной щтанге 19. Упор 21 жестко закреплен на поворотном-кулаке 3. На крепежной штанге 19 установлен выключатель 22. I
Части 10 и 11 разрезной поперечной тяги ввинчены в гайку 23 механического редуктора 12. На внутренних концах частей 10 и 11 попереч- , ной тяги нарезаны левая и правая ч. резьбы. Внутри гайки 23 с разных стоto
07876
, рон также нарезаны левая и правая резьбы. На гайке 23 жестко установлено червячное колесо 24, взаимодействующее с червячным валом 25, механически соединенньгм с ротором электрического двигателя 13.
Устройство работает следующим образом.
Уравновешенный электрический мост 15 настроен так, что при оп- . тимальном расстоянии между ободами управляемых колес 1 и 2, при котором боковые силы, действующие в пятне контакта шин управляемых колес I и 2 с дорогой, равны минимальному значению (нулю), выходной сигнал равен нулю. Если при движении транспортного средства расстояние между ободами управляемых колес 1 и 2 отличается от оптимального вследствие деформации конструкции ходовой части, то электрический сигнал, вырабатываемый уравновешенным электрическим мостом 15,отличается от нуля, 25 управляя при этом работой электрического усилителя 14. Электрический усилитель 14 питает электрический двигатель 13, который приводит во вращение механический редуктор 12, изменяющий длину поперечной тя15
20
30
ги, чем осуществляется изменение угла схождения управляемых колес 1 и 2 до оптимального значения.
Индуктивные датчики 16 и 17, жестко закрепленные на поворотных кронштейнах 18 (левом и правом, определяют расстояние между обода- ми управляемых колес I и 2. Поворотный кронштейн 18, шарнирно закрепленный на крепежной штанге 19, поворачивается .относительно нее вправо при повороте управляемых колес 1 и 2 вправо. Упор 21, жестко закрепленный на поворотном кулаке 3, механически воздействует на поворотный кронштейн 18, соприкасаясь с ним, что обеспечивает поворот поворотного кронштейна 18 с индуктивным датчиком 16 вправо
при повороте управляемых колес 1 и 2 вправо. При этом описываемое устройство автоматического регулирования отключается благодаря выключателю 22, взаимодействующему с упором поворотного кронштейна 18. Во время возвращения управляемых колес 1 и 2 в положение, соответствующее прямолинейному движению.
пружина 20 растяжения возвращает поворотный кронштейн 18 в исходное положение, соответствующее прямолинейному движению. При этом устройство автоматического регулирования включается благодаря выключателю 22. Крепежная штанга 19 закреплена -в центре балки переднего моста 5. Это позволяет исключить действие на крепежную штангу 19 деформаций со стороны деформирующейся в процессе движения балки переднего моста 5. При повороте управляемых колес 1 и 2 влево отключение устрой207876
ства автоматического регулирования обеспечивается правой частью, конструкция и работа которой аналогична левой, приведенной на фиг. 2. 5 Механический редуктор 12 работа- ет следующим образом.
Червячный вал 25, приводимый во вращение электрическим двигателем 13, вращает червячное колесо 24 10 и гайку 23, изменяя при этом длину поперечной тяги. Это позволяет регулировать угол схождения управляемых колес 1 и 2 в процессе движения.

/
JS
Фиг.З
25
Ю
fPuz.if
Редактор М.Келемеш
Составитель В.Калмыков
Техред М.НадьКорректор А.Зимокосов
Заказ 154/24 Тираж 572Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород , . ул. Проектная, 4
| Передний управляемый мост с изменяемыми углами установки колес транспортного средства | 1980 |
|
SU927614A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
