Изобретение относится к области транспортного машиностроения, в частности, к рулевым управлениям колесных транспортных средств.
Известен управляемый колесный модуль с изменяемыми углами установки управляемых колес, содержащий управляемые колеса, установленные на поворотных кулаках. Поворотные кулаки шарнирно установлены посредством шкворней на балке и соединены посредством двух поворотных рычагов и шарниров с разрезной поперечной тягой. Разрезная поперечная тяга, в свою очередь, выполнена с возможностью изменения ее длины за счет вращения соединительной гайки. При этом соединительная гайка кинематически связана с редуктором, приводимым в действие электродвигателем, который управляется сигналом рассогласования электрического моста от датчиков (SU, А.с. 1207876, кл. В 62 D 17/00, 1986 - прототип).
Недостаток известного управляемого колесного модуля заключается в низком КПД электромеханической следящей системы, включающей механический редуктор, кинематически связанный с электродвигателем, больших габаритах и сложности компоновки редуктора и электродвигателя на разрезной поперечной тяге для обеспечения работоспособности управляемого колесного модуля, поскольку разрезная поперечная тяга совместно с соединительной гайкой в процессе движения транспортного средства по криволинейной траектории совершает плоскопараллельное движение по окружности. Кроме того, как показали результаты специально проведенного исследования, существует оптимальное значение углов установки управляемых колес, при котором затраты энергии на их качение и, следовательно, износ пневматических шин и расход топлива будут минимальными. При этом величина угла схождения управляемых колес прямо пропорциональна синусу угла их развала и длине контакта пневматической шины и обратно пропорциональна радиусу колеса (Редчиц С.В., Редчиц В.В., Плотников В.И. К вопросу об углах установки управляемых колес. //Рязань, ВАИ, Научно-технический сборник 9, 1999, с. 62-67). В свою очередь длина контакта и радиус колеса определяются вертикальной нагрузкой на него и давлением воздуха в шинах: при увеличении нагрузки и (или) снижении давления воздуха в шинах длина контакта увеличивается, а радиус уменьшается и наоборот. Таким образом, для обеспечения оптимального режима качения управляемых колес угол их схождения с увеличением нагрузки и (или) снижении давления воздуха в шинах должен увеличиваться, что не обеспечивается конструкцией известного управляемого колесного модуля.
Изобретение направлено на расширение функциональных возможностей управляемого колесного модуля с изменяемыми углами установки управляемых колес, улучшение компонуемости его электромеханической следящей системы на транспортном средстве, уменьшение габаритов и повышение КПД.
Решение поставленной задачи достигается тем, что управляемый колесный модуль с изменяемыми углами установки управляемых колес содержит управляемые колеса, установленные на поворотных кулаках. Поворотные кулаки шарнирно установлены посредством шкворней на балке и соединены посредством двух поворотных рычагов и шарниров с разрезной поперечной тягой. Разрезная поперечная тяга, в свою очередь, выполнена с возможностью изменения ее длины. Одна из частей разрезной поперечной тяги соединена посредством резьбы с ротором электродвигателя, статор которого жестко соединен с другой ее частью. При этом электродвигатель связан с выходом контроллера, входы которого соединены с датчиками положения управляемых колес, вертикальной нагрузки и давления воздуха в шинах.
Предлагаемый управляемый колесный модуль с изменяемыми углами установки управляемых колес отличается тем, что он дополнительно снабжен датчиками вертикальной нагрузки и давления воздуха в шинах, а также контроллером, входы которого соединены с соответствующими датчиками, а выход - с электродвигателем, ротор которого соединен с одной из частей разрезной поперечной тяги посредством резьбы, выполненной внутри него вдоль его оси, а статор жестко связан с другой ее частью.
Контроллер, датчики вертикальной нагрузки и давления воздуха в шинах широко известны, однако при их введении в указанной связи с остальными элементами управляемый колесный модуль с изменяемыми углами установки управляемых колес проявляет новые свойства. В частности в результате того, что электродвигатель через ротор связан посредством резьбового соединения с одной из частей разрезной поперечной тяги, а через статор жестко связан с другой ее частью, и при этом электрически связан с выходом контроллера, входы которого соединены с соответствующими датчиками, угол схождения управляемых колес будет автоматически регулироваться при изменении вертикальной нагрузки и давления воздуха в шинах. Кроме этого, благодаря тому, что в роторе электродвигателя вдоль его оси выполнено резьбовое отверстие, а его статор жестко связан с одной из частей разрезной поперечной тяги, исключена необходимость установки редуктора и соединительной гайки, благодаря чему улучшается компонуемость на транспортном средстве, уменьшаются габариты и повышается КПД.
На чертеже представлена схема управляемого колесного модуля с изменяемыми углами установки управляемых колес.
Управляемый колесный модуль с изменяемыми углами установки управляемых колес (см. чертеж) содержит управляемые колеса 1, установленные на поворотных кулаках. Поворотные кулаки шарнирно установлены посредством шкворней 2 на балке 3 и соединены посредством двух поворотных рычагов 4 и шарниров с разрезной поперечной тягой 5. Разрезная поперечная тяга 5 выполнена с возможностью изменения ее длины. Одна ее часть связана с ротором электродвигателя 6 посредством резьбы, выполненной внутри него вдоль его оси, а другая связана жестко с корпусом электродвигателя 7, который является также статором 8. Статор электродвигателя 8, в свою очередь, соединен с выходом контроллера 9, входы которого соединены с датчиками положения управляемых колес 10, вертикальной нагрузки 11 и давления воздуха в шинах 12. В качестве указанных датчиков могут быть использованы приборы потенциометрического, индуктивного, магнитоэлектрического либо пьезоэлектрического типа. Контроллер 9 представляет собой микроЭВМ, содержащую аналогоцифровой преобразователь 13, воспринимающий сигналы датчиков, постоянное запоминающее устройство 14, хранящее программу обработки данных, процессор 15, выполняющий необходимые вычисления, оперативное запоминающее устройство 16, используемое для хранения результатов промежуточных вычислений, цифроаналоговый преобразователь 17, формирующий сигнал управления электродвигателем, и блок питания 18.
Управляемый колесный модуль с изменяемыми углами установки управляемых колес работает следующим образом.
Изменение давления воздуха в шинах, вертикальной нагрузки на управляемые колеса 1 или их положения (угла поворота) приводит к изменению выходных параметров соответствующих датчиков 12, 11 и 10. Электрический сигнал, снимаемый контроллером 9 с указанных датчиков, преобразуется аналого-цифровым преобразователем 13 в цифровой вид и передается процессору 15, который на основе программы, хранящейся в постоянном запоминающем устройстве 14, рассчитывает оптимальное значение угла схождения управляемых колес в каждом конкретном случае. Результаты расчета преобразуются цифроаналоговым преобразователем 17 в сигнал управления электродвигателем. Ротор электродвигателя 6, вращаясь, свинчивается или навинчивается на одну из частей разрезной поперечной тяги 5. Поскольку статор 8 электродвигателя 7 жестко связан со второй половиной разрезной поперечной тяги 5, происходит изменение длинны разрезной поперечной тяги, что влечет за собой соответствующее изменение угла схождения управляемых колес 1.
Таким образом, предлагаемый управляемый колесный модуль обеспечивает постоянное автоматическое регулирование угла схождения управляемых колес в зависимости от вертикальной нагрузки, давления воздуха в шинах и положения управляемых колес.
Изобретение относится к транспортному машиностроению, в частности к рулевым управлениям колесных транспортных средств. Управляемый колесный модуль с изменяемыми углами установки управляемых колес содержит управляемые колеса, установленные на поворотных кулаках. Поворотные кулаки шарнирно установлены посредством шкворней на балке и соединены посредством двух поворотных рычагов и шарниров с разрезной поперечной тягой. Разрезная поперечная тяга выполнена с возможностью изменения ее длины за счет вращения ротора электродвигателя, связанного посредством резьбы с одной из ее частей, в то время как другая жестко связана со статором. При этом электродвигатель связан с выходом контроллера, входы которого соединены с датчиками положения управляемых колес, вертикальной нагрузки и давления воздуха в шинах. Изменение давления воздуха в шинах, вертикальной нагрузки на управляемые колеса или их положения (угла поворота) приводит к изменению выходных параметров соответствующих датчиков. Электрический сигнал, снимаемый с указанных датчиков, преобразуется контроллером в сигнал управления электродвигателем. Ротор электродвигателя, вращаясь, свинчивается или навинчивается на одну из частей разрезной поперечной тяги и поскольку статор электродвигателя жестко связан со второй половиной разрезной поперечной тяги, это приводит к изменению ее длины и соответствующему изменению угла схождения управляемых колес. Изобретение направлено на расширение функциональных возможностей управляемого колесного модуля, улучшение компонуемости его электромеханической следящей системы на транспортном средстве, уменьшение габаритов и повышение КПД. 1 ил.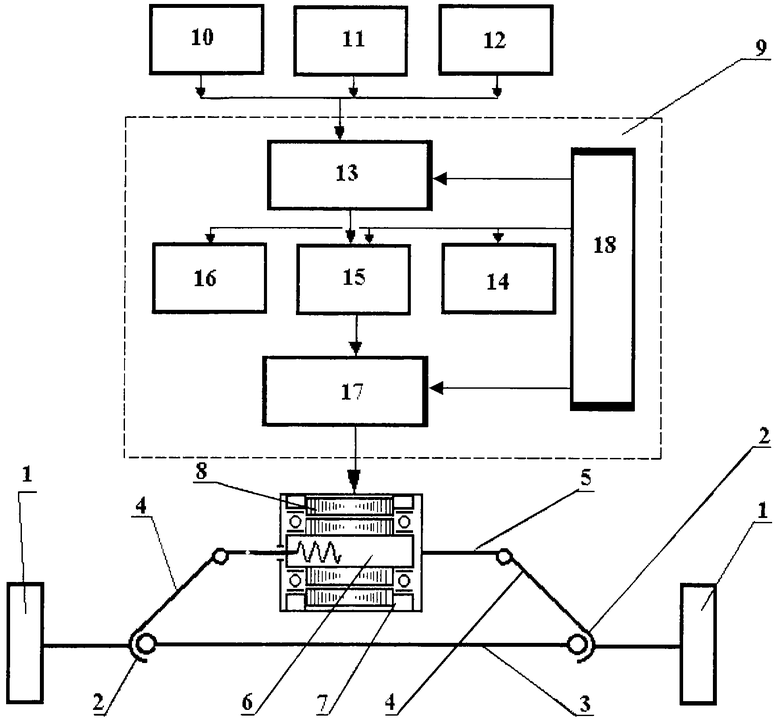
Управляемый колесный модуль с изменяемыми углами установки управляемых колес, содержащий управляемые колеса, установленные на поворотных кулаках, шарнирно установленных посредством шкворней на балке и соединенных посредством двух поворотных рычагов и шарниров с разрезной поперечной тягой, которая выполнена с возможностью изменения ее длины, отличающийся тем, что он дополнительно снабжен датчиками вертикальной нагрузки и давления воздуха в шинах, а также контроллером, входы которого соединены с соответствующими датчиками, а выход - с электродвигателем, ротор которого, в свою очередь, соединен с одной из частей разрезной поперечной тяги посредством резьбы, выполненной внутри него вдоль его оси, а статор жестко связан с другой частью разрезной поперечной тяги.
| Устройство автоматического регулирования угла схождения управляемых колес транспортного средства | 1984 |
|
SU1207876A1 |
| Управляемый мост с регулируемыми углами установки колес транспортного средства | 1987 |
|
SU1481129A1 |
| US 4795187 A, 03.01.1989 | |||
| US 4552379 A, 12.11.1985 | |||
| US 4616845 A, 14.10.1986 | |||
| Рулевая трапеция транспортного средства | 1986 |
|
SU1335494A1 |
