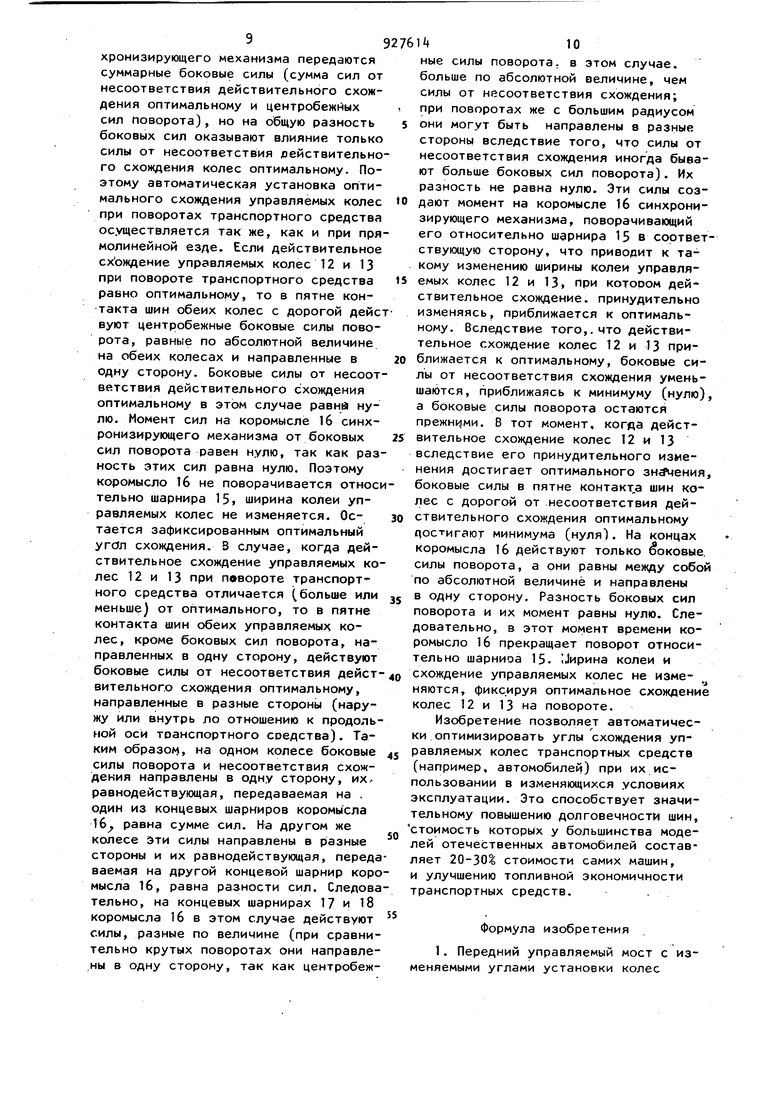
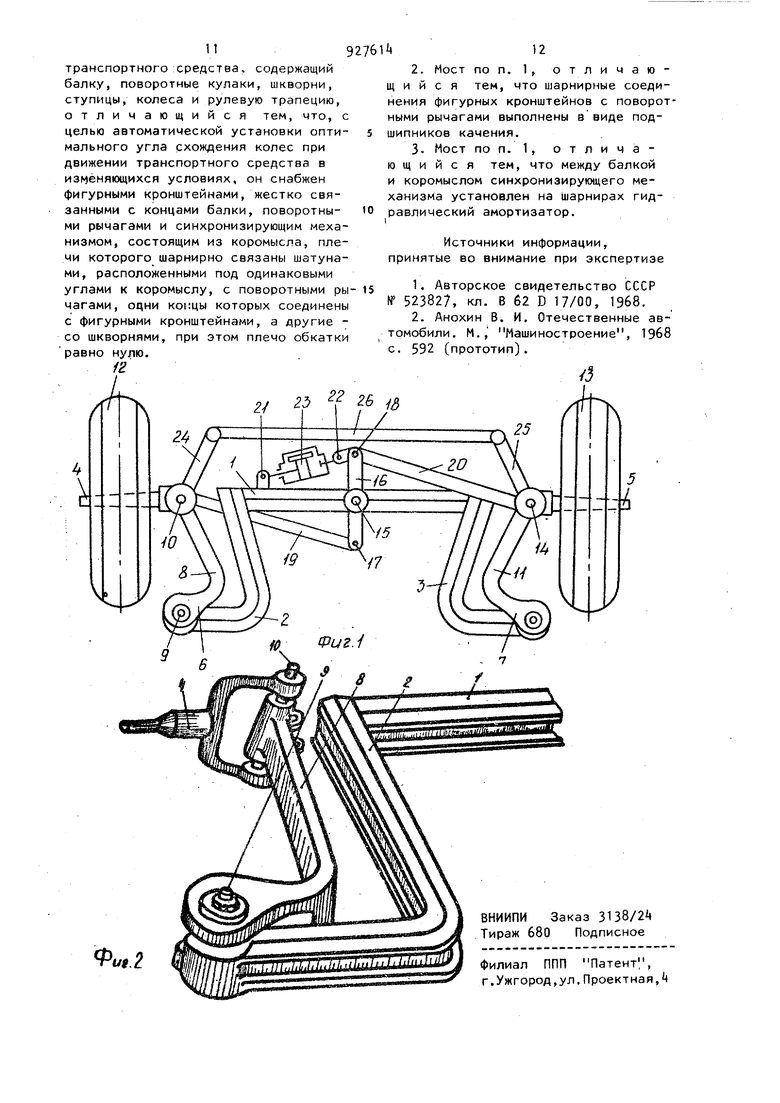
(5) ПЕРЕДНИЙ УПРАВЛЯЕМЫЙ МОСТ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ КОЛЕС ТРАНСПОРТНОГО Изобретение относится к безрельсовым наземным самоходным транспортным средствам и может быть использовано в автомобильных и колесных тракторах с неразрезной передней осью. Известен передний с изменяемыми углами установки колес транспорт ного средства, содержащий рулевую трапецию, трубчатую ось с установленными по концам с возможностью осе- вого перемещения и поворота вилками, каждая из которых снабжена механизмами фиксаций в заданном положении отно сительно оси и шарнирно соединена с корпусом, в котором установлен поворотный шкворень, нижним концом соединенный с цапфой, имеющей механизм фик сации ее углового положения относительно шкворня; с целью упрощения бес ступенчатого и независимого измене «ия угловых положений шкворня и вилки и их фиксации относительно оси моста на каждой вилке установлен с возможностью осевого перемещения кронштейн. СРЕДСТВА в котором зафиксирована резьбовая тя-, га, шарнирно соединенная одним концом с корпусом шкворня, другим концом раз мещенная в сквозном дуговом пазу, выполнном во втором кронштейне, установленном неподвижно относительно оси и. соединенном с первым из упомянутых кронштейнов посредством регулировочного винта ij . Недостатком данного переднего моста является то, что изменение угла схождения управляемых колес у него может быть осуществлено только в стационарных условиях, на неподвижном транспортном средстве. Наиболее близким к предложенному по конструктивным признакам является передний управляемый мост с изменяемыми углами установки колес транспортного средства, содержащий балку, поворотные кулаки, шкворни, ступицы, колеса и рулевую трапецию 2. Недостатком известного переднего моста является то, что в нем установ.ka оптимального схождения может быть осуществлена только в стационарных условиях, т. е, тогда, когда транспортное средство не находится в движении. В эксплуатационных же условиях автомобиль или другое колесное транспортное средство дви кется с различными скоростями и нагрузками на дорогах разного состояния, что сопровождается изменением сил, деист вующИх в гтятне контакта шин управляемых колес с дорогой и изменением уг ла схождени я колес. Результаты специального исследова ния показали, что причина изменения схождения управляемых колес при движении транспортного средства заклю- чается в следующем. Сила сопротивления качения, действующая со стороны дороги на управляемое колесо движущегося транспортного средства, изме няется в очень широких пределах. Эта сила относительно шкворня создает мо мент, стремящийся повернуть колесо и тем самым изменить угол схождения. При езде, по t дороге с поперечным ук лоном и на поворотах положение еще сложнее, так как в пятне контакта шин управляемых колес с дорогой допо нительно де,йствуют боковые силы за счет уклона или боковые центробежные силы инерции поворота. Они вызывают ответные реакции со стороны дороги, кото|:|ые оказывают существенное влияние на изменение силы сопротивления качению и схождения колес. Кроме того,, поворот рулевого колеса приводит к непосредственному изменению схождения вследствие того, что внутренне и внешнее управляемые колеса поворачиваются на различные углы. Таким образом, при движении транспортного средства в различных условиях (рост или снижение нагрузки, скорости, суммарного сопротивления дороги, ее профиля) изменяется сила сопротивления качению и ее момент относительно шкворня, что приводит к изменению схождения управляемых колес вследствие уменьшения или увеличения деформаций соответствующих деталей рулевого управления и передней оси. Следовательно, к недостаткам переднего управляемого моста, применяемого в настоящее время на всех современных грузовых автомобилях, автобусах и других колесных транспортных средствах, может быть отнесено то. ЧТО он не обеспечивает оптимального схождения управляемых колес при езде в изменяющихся условиях. Поэтому действительные углы схождения на движущихся транспортных средствах отличаются от оптимальных, гарантирующих наиболее экономичные эксплуатационные показатели. Ведь изменение углов схождения в любую сторону от оптимального значения сопровождается увеличением силы сопротивления качению за счет ооста ее боковой составляющей, ухудшением топливной экономичности и ускоренным износом шин. Цель изобретения - автоматическая установка оптимального угла схождения колес при движении транспортного средства в изменяющихся условиях. Поставленная цель достигается тем, что передний мост снабжен«фигурными кронштейнами, жестко связанными с концами балки, поворотными рычагами и синхронизирующим механизмом, состоящим из коромысла, плечи которого шарнирно связаны шатунами, расположенными под одинаковыми углами к коромыслу, с поворотными рычагами, одни концы которых соединены с фигурными кронштейнами, а другие - с шквсонями, при этом плечо обкатКи равно нулю. Кроме того, шарнирные соединения фигурных кронштейнов с поворотными рычагами выполнены.в виде подшипников качения, а между балкой и коромыслом синхронизирующего механизма установлен на шарнирах гидравлический амортизатор. , На фиг. 1 показан схематически передний управляемый мост; на фиг. 2направляющее устройство переднего управляемого моста. Передний управляемый мост содержит балку 1 передней оси, наружные концы которой заканчиваются жестко установленными фигурными кронштейнами 2 и 3. Между кронштейнами и поворотными кулаками 4 и 5 управляемых колес установлен направляющий механизм, который состоит из двух одинаковых направляющих устройств 6 и 7. Основу направляющего устройства например левого 6) составляет поворотный рычаг 8, задний вильчатый конец которого шарнирно соединен установочным пальцем 9 с внешним концом фигурного кронштейна 2. Для повышения долговечности переднего моста шарнирный палец 9, соединяющий фигурный кронштеин и поворотный рычаг, установлен на роликовых конических подшипниках. Гнездами наружных обойм подшипников являются цилиндрические выточки в проушинах вильчатого конца рычага 8. Передний конец рычага 8 имеет бобышку с проушиной, которая установлена между внутренними торцовыми поверхностями вилок поворотного кулака . Поворотный кулак 4 шарнирно соединен с передним концом рычага 8 шкворнем lOi, Таким образом, направляющее устройство 6 со ержит поворотный рычаг 8, установочный палец 9 с опорными и крепежными элементами, шкворень 10. Направляющее устройство 7 имеет совершенно аналогичную конструкцию, его основу составляет поворотный рычаг 11. Переание упоавляемые колеса 12 и 13 установлены так, что их плечи обкатки равны нулю, т. е. следы продольных осей шкворней 10 и 14 на плоскость дороги попадают на линии .Действия сил сопротивления качению соответственно в центры пятен контакта шин управляемых колес 12 и 13 с дорогой. На балке 1 передней оси шарниром :15 (посредине; закреплено коромысло 16 синхронизирующего механизма, который делит боковые силы, действующие в пят не контакта колес с дорогой, пополам. На«концах коромысла 16 с помощью шарниров 17 и 18 установлены два шатуна 19 и 20 равной длины которые образуют с коромыслом 16 одинаковые углы. Наружные концы шатунов своими хвостовиками закреплены в приливах бобышек передних концов Поворотных рычагов 8 и 1J. Для компенсации действия случайныхбоковых толчков и фиксации крайних положений управляемых колес между балкой передней оси и коромыслом синхронизирующего механизма смонтирован на шарнирах 21 и 22 гидравлический амортизатор 23. Рулевая трапеция - такая же как на всех современных автомобиля и колесных тракторах (изменений нет). Рулевые рычаги 2k и 25 трапеции с одной стороны соединеньр) с поворотными кулаками t и 5, а с другой стороны С наконечниками поперечной тяги 2б.
Работа осуществляется следующим образом.
На неподвижном транспортном средстве (например, на автомобиле установлен угол схождения управляемых колес 12 и 13 в соответствии с техническими условиями. Если в процессе прямолинейного движения транспортного средства по горизонтальной дороге действительное схождение управляемых колес соответствует оптимальному значению, то боковые силы, действующие в пятне контакта шин колес 12 и 13 с дорогой равны минимальному значению (нулю). Действие боковых сил соответственно через колеса 12 и 13 поворотные кулаки 4 и 5, шатуны 19 и 20 синхронизирующего механизма передается на |шарниры 17 и 18 коромысла 16. Так как боковые силы на концах коромысла 16 равны нулю, то синхронизирующий механизк. не срабатывает. Ширина колеи управляемых колес 12 и 13 движущегося транспортного средства не изменяется, остается прежним, угол схождения .
Если действительное схождение управляемых колес 12 и 13 в процессе прямолинейной езды по горизонтальной дороге меньше оптимального, то боковые силы, действующие в пятне контакта шин обоих управляемых колес, больше минимального значения и направлены наружу перпендикулярно осидвижущегося транспортного средства, т.е. в разные стороны. В шарнирных концах коромысла 16 действуют две равные по величине параллельные силы (каждая из КОТОРЫХ приложена к соответствующему шарниру 17 или 18 и равна боко-. вой силе, действукмцей в пятне контакта шин колеса 12 и 13 с дорогой), направленные наружу. Они создают пару . сил, момент которой поворачивает коромысло 16 по часовой стрелке относительно шарнира 15- Поворот коромысла :1б сопровождается соответствующими перемещениями шатунов 19 и 20, а также кинематически связанных с ними поворотных кулаков 4 и 5 с управляемыми колесами 12 и 13- Происходит принудительное изменение ширины колеи. Синхронизирующий механизм обеспечивает в этом случае автоматическое увеличение ширины колеи за счет одновременного перемещения левого и правого управляемых колес на одинаковые расстояния, так как одновременно с синхронизирующим механизмом срабатывают оба направляющих устройства 6 и 7 направляющего механизма (происходит изменение положения поворотных рычагов 8 и 11 относительно фигурных кронштейнов 2 и 3 балки 1 передней оси). Следовательно, согласованная работа синхронизирующего и направляющего механиз7MOBобеспечивает одновременное перемещение левого и правого управляемых колес 12 и 13 с поворотными кулаками и 5 на одинаковые расстояния. Увеличение ширины колеи управляемых колес 12 и 13 приводит к повороту руле вых рычагов 2 и 25 рулевой трапеции так как они соединены с переме1цак щйм ся вдоль продольной осибалки 1 поворотными кулаками и 5« Изменение полоА ения рулевых рычагов 24 и 25 сопровождается увеличением схождения управляемых колес 12 и 13 вследствие их поворота совместно с поворотными кулаками Л и 5.oтнocиteльнo шкворней .10 и И. По мере принудительного увеличения действительного ; схождения управляемь1х колес движущегося транспортного средства и приближения .его к оптимальному боковые силы в пятне контакта шин колес с дорогой уменьшаются, приближаясь к минимальному значению (нулю).,В мо-, мент достижения действительным схождением оптимальной величины боковые силы достигают минимального значения их разность как в пятнах контакта шин, так и на концах коромысла 16 равна нулю. Вследствие того, что раз , ность боковых сил а шарнирах 17 и 18 коромысла 16 равна нулю, их момент также равен нулю. Поэтому прекращается принудительное изменение шириной колеи и схождения управляемы колес, зафиксировав его оптимальную величину. Если же действительное схождение управляемых колес 12 и 13 при прямолинейной езде по горизонтал ной дороге больше оптимального, то боковые силы на обеих колесах больше минимального значения, но направлены внутрь перпендикулярно продольной оси движущегося транспортного средст 1ва (тоже в разные сторонь, но противоположного направления). В шарнирах 17 и 18 коромысла 16 и в этом случае действуют две равные по абсолютной величине силы, создающие пару сил. Момент пары сил поворачивает коромыс ло 16 Против часовой стрелки относительно шарнира 1$. Поворот ко ромысла 16 сопровождается соответствующими перемещениямишатунов 19 и 20, поворотных рычагов 8 и 11 направляющих устройств 6 и 7 а также кинематичес ки связанных с ними поворотных кулаков А и 5 с колесами 12 и 13- Происходит принудительное уменьшение шири ны колеи управляемых колес. Последне Й приводит к соответствующему повороту рулевых рычагов 2k и 25. Изменение положения рычагов и 25 сопровождается уменьшением схождения колес 12 и 13. По мере .принудительного уменьшения действительного схождения управляемых колес движушегося транспортного сред ства и приближения его к оптимальному боковые силы в пятне контакта шин колес с дорогой уменьшаются, приближаясь к минимальному значению (нулю). 8 мойент достижения действительным схождением оптимальной величины боковые силы достигают минимального значения, их разность как в пятнах контакта шин, так и на концах коромысла 16 равна нулю. Вследствие того, что разность боковых, сил в шарнирах 17 и 18 коромысла 16 равна нулю, их момент также равен нулю. Поэтому прекращается принудительное изменение ширины колеи и схождения управляемых колес, зафиксировав его оптимальную величину. Изменение ширины колеи + 2 мм обеспечивается фиксацией крайних положений управляемых колес гидравлическим амортизатором 23, который смонтирован на шарнирах 21 и 22 между балкой передней оси и коромыслом синхронизирующего механизма (или же с помощью регулируемых ограничительных упоров, которые установлены, например, с двух сторон коромысла синхронизирующего механизма). Такая величина изменения ширины колеи обеспечивает автоматическую оптимизацию схождения управляемых колес на всем диапазоне изменения нагрузочных и скоростных режимов, дЕ1Ижущегося в различных условиях транспортного средства. При поворотах транспортного средства в ,пятне контакта шин управляемых колес с дорогой кроме боковых сил от несоответствия действительного схождения оптимальному действуют еще центробежные боковые силы инерции поворота, вызывающие ответные реакции со стороны дороги. Боковые центробежные силы инерции на обеих колесах.в любой момент времени (при поворотах транспортного средства в любую сторону с разными углами) равны ло абсолютной величине и направлены в одну сторону. Поэтому их разность всегда равна нулю. Следовательно, и момент от действия этих сил на шарнирах 17 и 18 коромысла 16 также всегда равен нулю. На шарниры 1 и 18 коромысла 16 син99
хронизирующего механизма передаются суммарные боковые силы (сумма сил от несоответствия действительного схождения оптимальному и центробежных сил поворота), но на общую разность боковых сил оказывают влияние только силы от несоответствия действительного схождения колес оптимальному. Поэтому автоматическая установка оптимального схождения управляемых колес при поворотах транспортного средства осуществляется так же, как и при прямолинейной езде. Если действительное схождение управляемых колес 12 и 13 при повороте транспортного средства равно оптимальному, то в пятне контакта шин обеих колес с дорогой действуют центробежные боковые силы поворота, равные по абсолютной величине на обеих колесах и направленные в одну сторону. Боковые силы от несоответствия действительного схождения оптимальному в этом случае равна нулю. Момент сил на коромысле 1б синхронизирующего механизма от боковых сил поворота равен нулю, так как разность этих сил равна нулю. Поэтому коромысло 16 не поворачивается относительно шарнира 15, ширина колеи управляемых колес не изменяется. Остается зафиксированным оптимальный уг0л схождения. В случае, когда действительное схождение управляемых колес 12 и 13 при повороте транспортного средства отличается (больше или меньше) от оптимального, то в пятне контакта шин обеих управляемых колес, кроме боковых сил поворота, направленных в одну сторону, действуют боковые силы от несоответствия деиствительног.о схождения оптимальному, направленные в разные стороны (наружу или внутрь ло отношению к продольной оси транспортного средства). Таким образо, на одном колесе боковые
силы поворота и несоответствия схождения направлены в одну сторону, их
равнодействующая, передаваемая на . один из концевых шарниров коромысла 16 равна сумме сил. На другом же колесе зти силы направлены в разные стороны и их равнодействующая, передаваемая на другой концевой шарнир коромысла 16, равна разности сил. Следовательно, на концевых шарнирах 17 и 18 коромысла 16 в этом случае действуют силы, разные по величине (при сравнительно крутых поворотах они направле.ны в одну сторону, так как центробеж k
10
ные силы поворота, в этом случае, больше по абсолютной величине, чем силы от несоответствия схождения; при поворотах же с большим радиусом они могут быть направлены в разные стороны вследствие того, что силы от несоответствия схождения иногда бывают больше боковых сил поворота). Их разность не равна нулю. Эти силы создают момент на коромысле 16 синхронизирующего механизма, поворачивающий его относительно шарнира 15 в соответствующую сторону, что приводит к такому изменению ширины колеи управляемых колес 12 и 13, при котором действительное схождение, принудительно изменяясь, приближается к оптимальному. Вследствие того,.что действительное схождение колес 12 и 13 приближается к оптимальному, боковые силы от несоответствия схождения уменьшаются , приближаясь к минимуму (нулю) а боковые силы поворота остаются прежн1 ми. В тот момент, когда действительное схождение колес 12 и 13 вследствие его принудительного изменения достигает оптимального знаРчения боковые силы в пятне контакт.а шин колес с дорогой от несоответствия действительного схождения оптимальному постигают минимума (нуля). На концах коромысла 16 действуют только боковые силы поворота, а они равны между собо по абсолютной величине и направлены в одну сторону. Разность боковых сил поворота и их момент равны нулю. Следовательно, в этот момент времени коромысло 16 прекращает поворот относительно шарниоа 15. Ширина колеи и схождение управляемых колес не изменяются, фиксируя оптимальное схождени колес 12 и 13 на повороте.
Изобретение позволяет автоматически оптимизировать углы схождения управляемых колес транспортных средств (например, автомобилей) при их использовании в изменяющихся условиях эксплуатации. Это способствует значительному повышению долговечности шин, стоимость которых у большинства моделей отечественных автомобилей составляет 20-30% стоимости самих машин, и улучшению топливной экономичности транспортных средств. .
Формула изобретения
1. Передний управляемый мост с изменяемыми углами установки колес
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый мост транспортного средства | 1974 |
|
SU1068320A1 |
| Способ установки схождения управляемых колес транспортного средства | 1978 |
|
SU746242A1 |
| РУЛЕВАЯ ТРАПЕЦИЯ С ИЗМЕНЯЕМЫМИ УГЛАМИ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС | 2008 |
|
RU2375230C1 |
| ПОДВЕСНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА ТРУБЕЦКОГО | 2020 |
|
RU2749467C1 |
| Устройство автоматического регулирования угла схождения управляемых колес транспортного средства | 1984 |
|
SU1207876A1 |
| ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2514951C2 |
| Способ оценки совместного влияния наВЕличиНу бОКОВОй Силы углОВ СХОждЕНияи РАзВАлА упРАВляЕМыХ КОлЕС ТРАНСпОРТНыХСРЕдСТВ | 1978 |
|
SU847137A1 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2211780C2 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2186703C2 |
| МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ВЫПОЛНЕНИЕМ РУЛЕНИЯ ДЛЯ УПРАВЛЯЕМОГО КОЛЕСА | 2012 |
|
RU2555902C2 |
