1
Изобретение относится к машиностроению, а именно к опорам качения для поступательного перемещения.
Наиболее близкой к предлагаемой является опора качения для поступательного и вращательного перемещений содержащая корпус и пиноль, меяоду которыми размещены тела качения, установленные в гнездах составного сепа.ратора, одна часть которого выполнена в виде кольцевых обойм ij .
Недостаток указанного технического решения заключается в том, что после некоторого времени эксплуата-; ции происходит износ деталей и предварительный натяг уменьшается и уменьшается жест.кость узла, вследствие чего возникает вибрация в станке и снижается качество обработки дет алей и точность позиционирования.
Цель изобретения - повьшение долговечности onopfji.
Указанная цель достигается тем, что в опоре качения для поступательного перемещения, содержащей корпу.с и пиноль, между которыми размещены тела качения, установленные в гнездах составного сепаратора, одна часть которого выполнена в виде кольцевых обойм, каждая из кольцевых обойм сепаратора выполнена секционг- ной,в виде установленных по окружности трапецеидальных призм, между боковыми поверхностями которых раз- меще;ны тела качения, по меньшей мере одна из призм выполнена упругой в окружном направлении и одна жестко закреплена на пиноли.
Упругая призма выполнена с двумя продольными параллельными глухими пазами, открытыми с противоположных торцов и расположенными под углом к боковым рабочим поверхностям.
Жесткая призма закреплена с помощью двух цилиндрических пальцев, один из которых рамбический или срез:анный.
Такое выполнение опоры обеспечивает компенсацию неточности изготовления элементов опоры и сохранение постоянного расположения призм в О1СРУЖНОМ . направлении, что позволяет повысить ее долговечность.
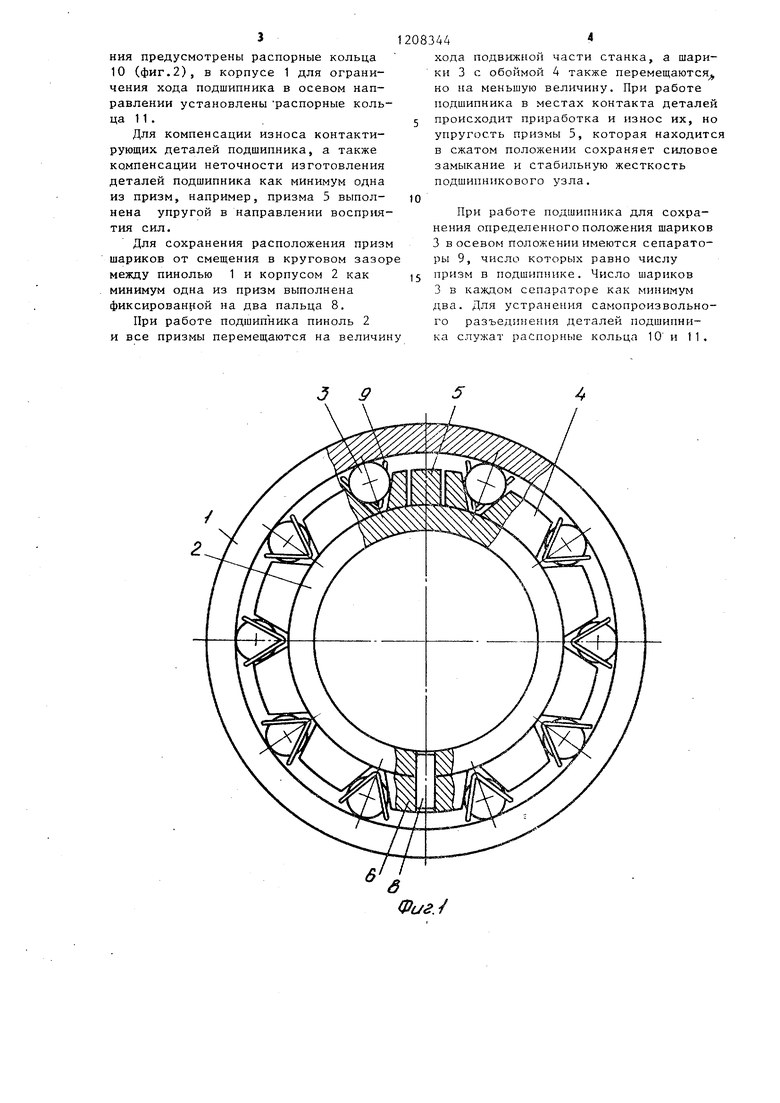
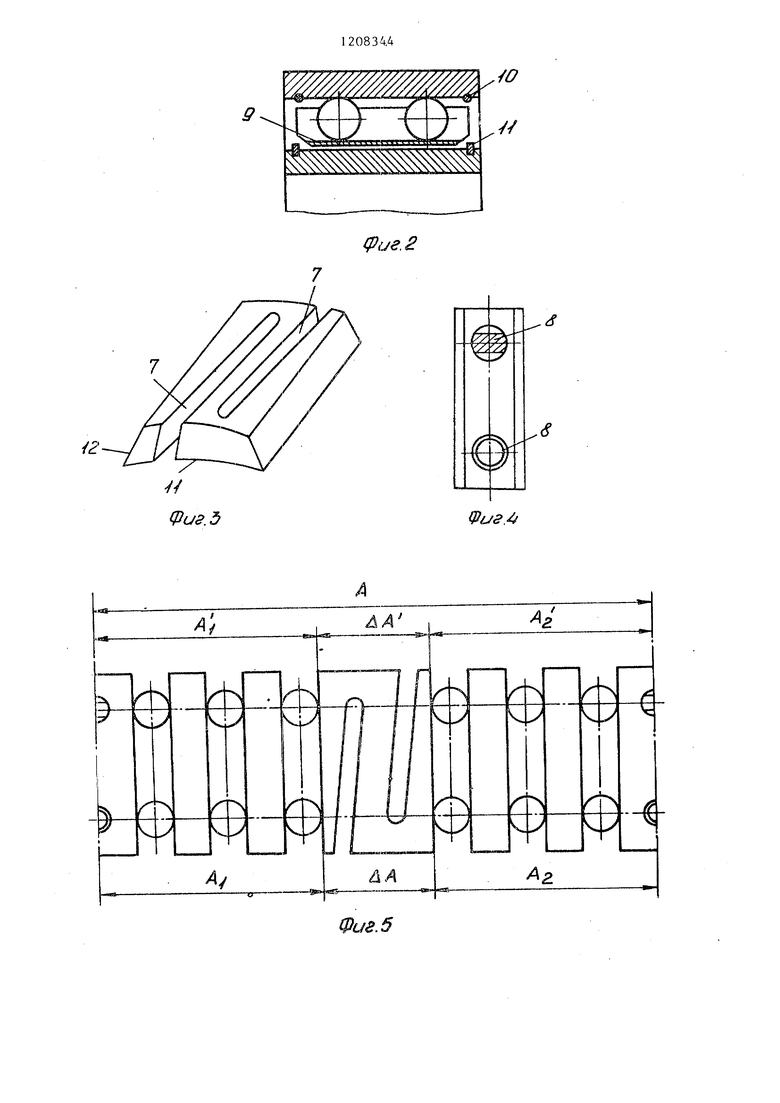
На фиг. 1 изображена опора, попе- рёчиьш разрез; на фиг. 2 - то лее, продольный разрез; на фиг. 3 - упругая призма; на фиг. 4 - крепление
083442
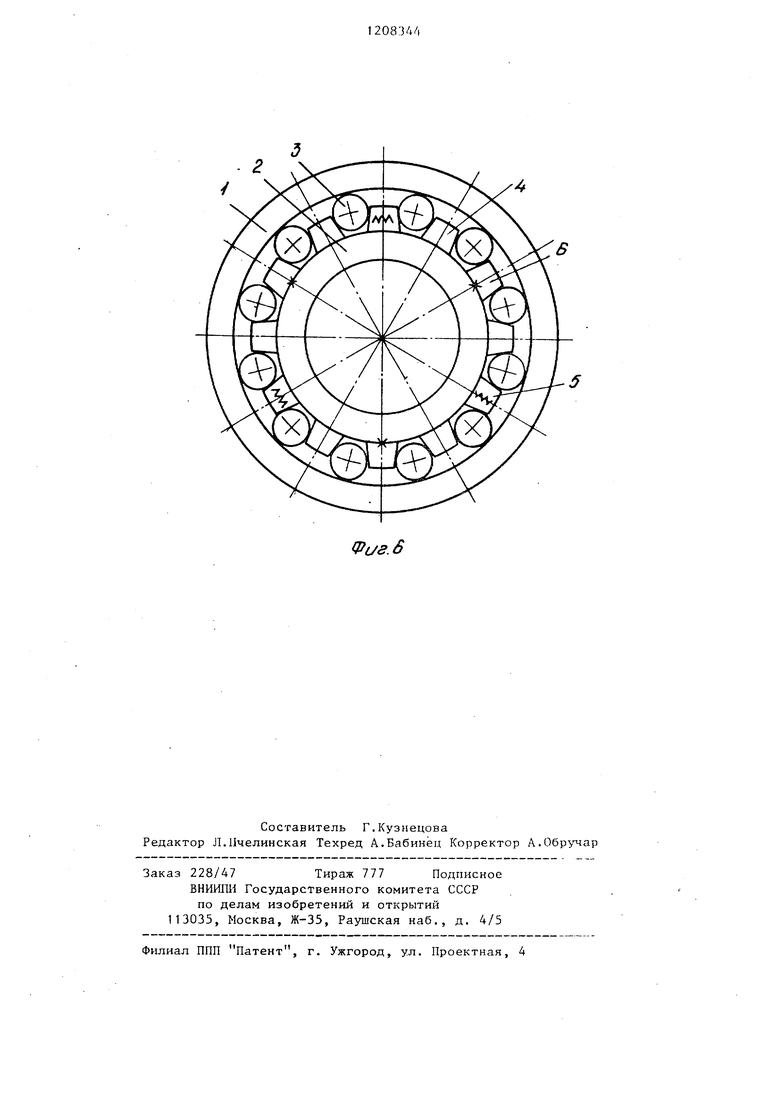
жесткой призмы к пиноли; на фиг. 5 - развертка призм и шариков подшипника, состоящего из одной секции; на фиг. 6 - опора из трех секцмй.
5 Опора качения для поступательного перемещения имеет корпус 1 и пиноль 2, между которыми размещены тела 3 качения, установленные, в гнездах составного сепаратора, одна часть
10 которого выполнена виде кольцевых обойм 4, каждая из кольцевых обойм сепаратора выполнена секционной, в виде установленных по окружности трапецеидальных призм 5, между
)5 боковьми поверхностями которых размещены тела 3 качения, по меньшей мере одна из призм 5 выполнена упругой в окружном направлении и призма 6 жестко закреплена на пиноли 2,
20 при этом упругая призма 5 выполнена с двумя продольными глухими пазами 7, открытыми с противоположных торцев, расположенными под углом к боковым рабочим поверхностям, а
25 жесткая призма 6 закреплена с помощью двух цилиндрических пальцев 8, один
из которых ромбический или срезанный .
При работе подшипника пиноль 2 и 3Q все призмы составляют единый комплект, который перемещается в осевом направлении относительно корпуса 1, при этом тела 3 качения в виде шариков прокатываются между призмами и корпусом 1. Для обеспечения заданного расстояния в осевом направлении между шариками, последние помещены в V-образный сепара-- тор 9.
Все призмы своими поверхностями базируются на цилиндрической поверхности пиноли 2 так, чтобы между сепаратором 9 с шариками 3 и пинолью 2 обеспечивался зазор.
На фиг. 5 показана круговая развертка деталей и размерная цепочка, замыкающим и компенсирующим звеном которой является упругая призма. Призма 6, помещенная в сжатом положении в подшипниках, поддерживает. замкнутыми цепи с размерами А и с размерами А . Наличие фиксированной призмы 6 обеспечивает постоянное положение деталей относительно пиноли в круговом отношении. 55 На пиноли 2 располагаются рабочие призмы 5, образуя продольные желоба для расположения шариков 3, для ограничения призм 5 от осевого смещег
3.5
40
4.5
50
3
ния предусмотрены распорные кольца 10 (фиг.2), в корпусе 1 для ограничения хода подшипника в осевом направлении установлены распорные кольца 11 .
Для компенсации износа контактирующих деталей подшипника, а также компенсации неточности изготовления деталей подшипника как минимум одна из призм, например, призма 5 выполнена упругой в направлении восприятия сил.
Для сохранения расположения призм шариков от смещения в круговом зазор между пинолью 1 и корпусом 2 как минимум одна из призм выполнена фиксирован {ой на два пальца 8,
При работе подшипника пиноль 2 и все призмы перемещаются на величин
08344
хода подвижной части станка, а шарики 3 с обоймой 4 также перемещаются но на меньшую величину. При работе подшипника в местах контакта деталей 5 происходит приработка и износ их, но упругость призмы 5, которая находится в сжатом положении сохраняет силовое замыкание и стабильную жесткость подшипникового узла.
10
При работе подшипника для сохранения определенного положения шариков 3 в осевом положении имеются сепараторы 9, число которых равно числу призм в подшипнике. Число шариков 3 в каждом сепараторе как два. Для устранения самопроизвольного разъединения деталей подшипника служат распорные кольца 10 и 11.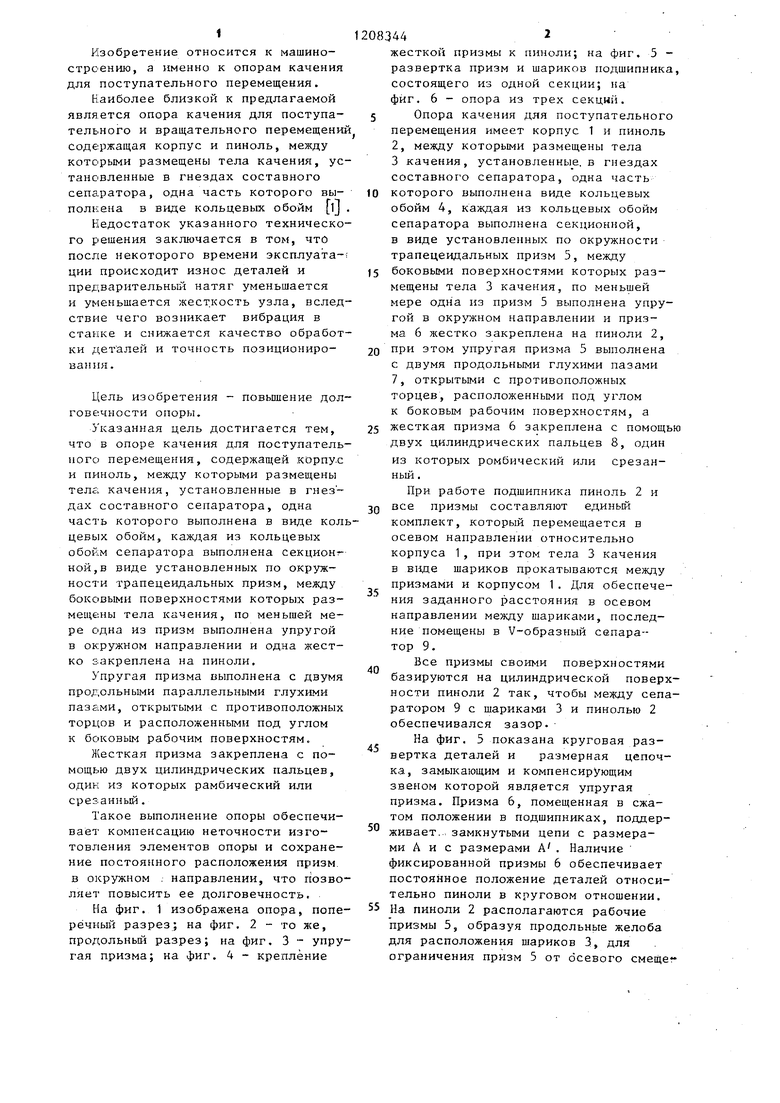
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДШИПНИК КАЧЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2006 |
|
RU2402700C2 |
| СПОСОБ СБОРКИ ДВУХРЯДНЫХ СФЕРИЧЕСКИХ ШАРИКОПОДШИПНИКОВ С ЛЕПЕСТКОВЫМИ СЕПАРАТОРАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2097615C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| БЕСКРИВОШИПНЫЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2187673C1 |
| Кулачковый генератор волновой передачи | 1975 |
|
SU658344A1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2182241C2 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ "РЕДУКТОР-ПОДШИПНИК" | 2001 |
|
RU2179272C1 |
| Центробежная литейная машина с вертикальной осью вращения | 1976 |
|
SU643229A1 |
Фиг.
s
.ю
V/
Срие.2
.(f
Фиг.
Фиг. б
- г
Фиг. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Направляющая качения для поступательного перемещения | 1974 |
|
SU572598A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
