1
Изобретение относится к разработке полезных ископаемых морского дна и может быть использовано fiflK получения зависимостей сил резания от толщины снимаемого слоя грунта, для различных рабочих органов с взятием проб при каждой установке устройства на дно.
Цель изобретения - повьпаение производительности получения характеристик данных грунтов за счет увеличения числа замеров за одно погру- жение ;
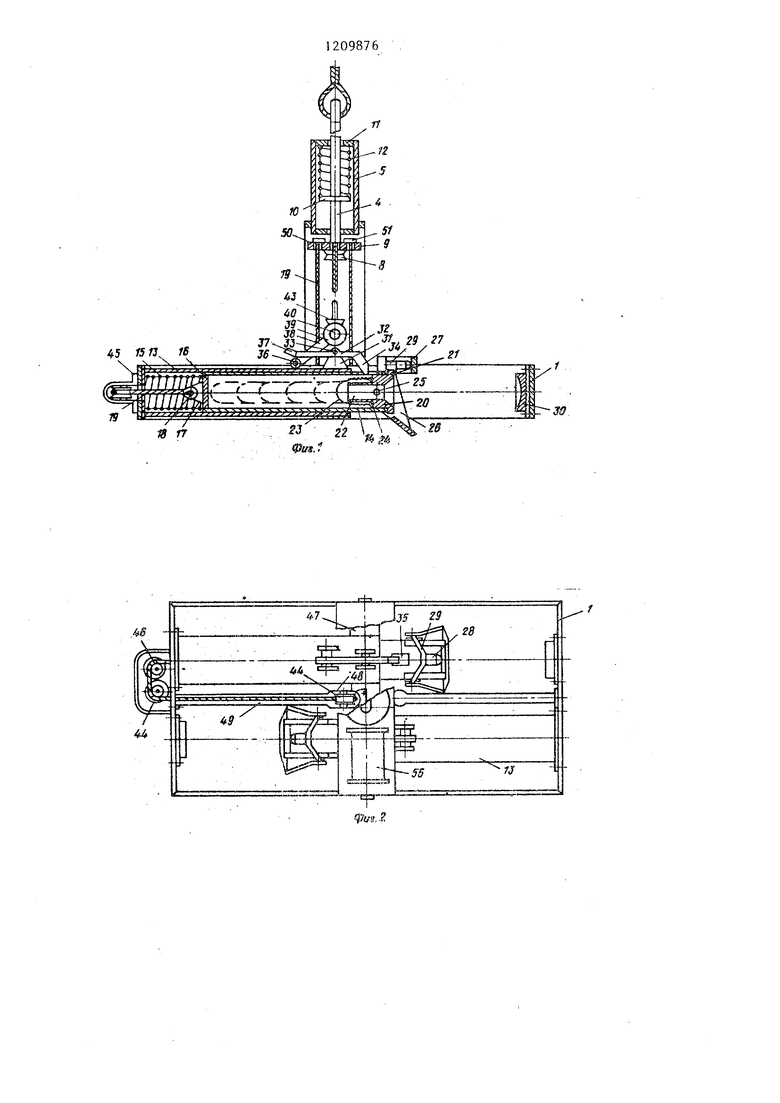
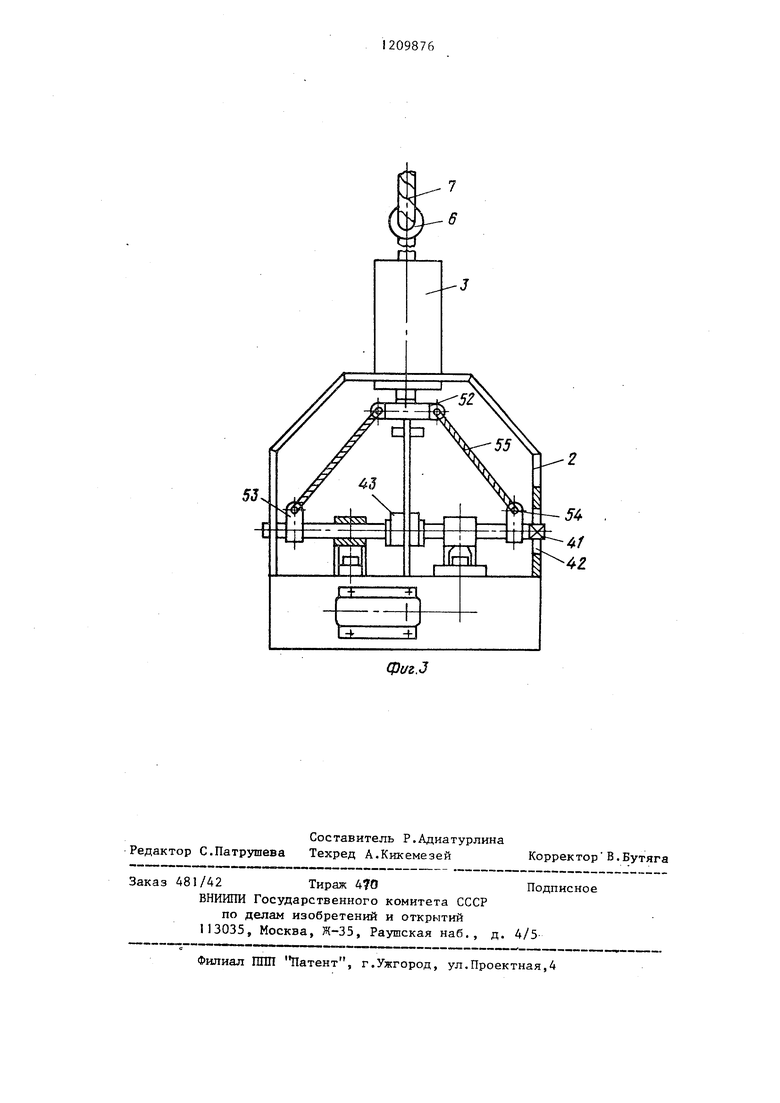
На фиг.1 изображено устройство, общий вид; на фиг.2 - то же, вид в плане; на фиг.З - то же, вид сбот ку,
Устройство состоит из несущей рамы 1, соединенной в средней части с траверсой 2, которая оборудована упругой подвеской 3, имеющей шток 4, выходящий с двух сторон 5 и заканчивающийся сверху проушиной 6 для крепления каната 7, снизу - толкателем 8 и планкой 9. В средней части шток 4 имеет поршень 10, между ним и крьшшой 11 цилиндра 5 установлена пружина 12,
Рама оборудована двумя неподвижными направляющими рамами 13, в которые входят подвижные направляющие 14
Внутри неподвижных направляющих установлена пружина 15, упирающаяся одним концом в раму 1, а вторым - в заднюю торцовую крьшпсу 16 подвижной направляющей 14. На задней торцовой крьппке 1 6.-подвижной направляющей 14 прикреплена проущина 17 с пальцем 18 для крепления гибкого тягового элемента 19.
Передний торец подвижной направляющей 14 вьшолнен открытым и в него вставлена пробка 20 с центра,пьным отверстием, снабженная с одной стороны буртиком 21, а с другой ци-. линдрической юбкой 22, диаметр которой меньще, чем диаметр, которым ; пробка 20 вставляется в подвижную Направляющую 14v На цилиндрическую юбку 22 одет чулок 23 из эластичной оболочки, закрепленный на ней упругим концом 24. С открытой стороны направляющих 14 на пальцах 25 уста новлены сменные рабочие органы 26. На раме 1 установлены два рабочих органа 26 с возможностью их движения в противоположные стороны для уравновешивания сил взаимодействия с
098762
донными грунтами. Над рабочими органами на направляющих 4 закреплен упор 27, который взаимодействует с . датчиком 28 давления, установленном
;; на кронштейне 29 рабочего органа 26.
К раме 1 перед рабочими органами 26 прикреплены пуансоны 30 со сферическим поднутрением. Подвижная направляющая 14, пружина 15 и тор10 цовая крьшпса 16 образуют пружинный движитель. Для удержания подвижной направляющей 14 в исходном положении на неподвижной раме 13 установлен кронштейн 31, на котором за15 креплен стопор 32 на оси 33.-Стопор 32 под действием силы тяжести острия 34 заходит за край паза 35 на направ - ляющей 14 и удерживает подвижную направляющую 14 от движения под дей20 ствием силы упругости пружины 15 в сторону пуансона 30. Удержание стопора 32 в указанном,положении обеспечивается роликом 36, установленным под хвостовой частью 37 стопора 32.
25 Ролик 36 опирается на неподвижную раму 13 и соединен с тягой 38, которая на другом конце одета втулкой 39 на ось 40. Ось 40 цапфами 41 установлена в пазы 42 траверсы 2 (фиг.З).
3Q В средней части ось 40 снабжена наковальней 43.
Ролик 36 на тяге 38 с втулкой 39, осью 40 и наковальней 43 образуют механизм включения движителей рабочих органов 26.
Для сжатия пружины 15 устройство оборудовано системой направляющих блоков 44, установленных с внещней стороны рамы 1 в корпусе 45 на осях
д 46 горизонтально и на поперечине 47 в корпусе 48 - вертикально. Корпу- са 45 и 48 связаны направляющей трубой 49.
35
Втягивание подвижной направляющей 14 в неподвижную для последующего ее фиксирования стопором 32 производится гибким тяговым органом 19, соединенным с одной стороны с кольцом 18, подвижной направляющей 14, проходящей через горизонтальные блоки 44 в корпусе 45, направляющую трубу 49, вертикальный блок 44 корпуса 48 и отверстия 50 в планке 9, ас другой стороны - с зажимом
51 о
Шайба 9 имеет две проушины 52, расположенные диаметрально под углом 90 к отверстиям 50, а ось 40 3
два хомута 53 с пальцами 54. Между проушинами 52 и пальцами 54 установлена гибкая связь 55.
Устройство работает следующим образом.
Перед спуском устройства на дно на палубе плавсредства производят .его подготовку к работе. Для этого извлекают пробку 20 из подвижной направляющей 14, одевают на цилиндрическую юбку 22 чулок 23, собирая его в складки, закрепляют чулок кольцом 24 и устанавливают пробку в направляющую 14 до упора буртиком 21. Затем устройство подвешивают на канате 7, при этом шток 4 с поршнем 10 перемещается вверх в цилиндре 5 и размыкает толкатель 8 с наковальней 43 оси 40. Пружина 12 сжимается, планка 9 вместе со штоком 4 перемещается вверх, надавливает на зажимы 51 и тащит гибкие тяговые элементы 19 через направляющие вертикальны блоки 44, трубы 49, горизонтальные блоки 44, соединенные с пальцем 18, и, воздействуя через проушины 17 крьпчкой 16 на пружину 15, ее (сжимает) взводит.
В конце хода подвижной направляющей 14 стопор 32 под действием силы тяжести острия 34 зайдет (упадет) за край паза 35, при этом дальнейшее движение штока 4 вызовет натяжение гибких связей 55, через которые начнется подъем оси 40 в пазах 42. Подъем оси 40 переместит ролик 36 под хвостовую часть 37 стопора 32, удерживая его в пазу 35 направляющей 1 4.
Устройство подготовлено к работе на дне.
На дне устройство работает следующим образом.
При контакте рамы 1 с морским дном произойдет ослабление каната 7, пружина 12 начнет разжиматься и переместит шток 4 вниз; при этом нали098764
чие поршня в цилиндре 5 тормозит движение штока 4. Толкатель 8 войдет в контакт с наковальней 43 с некоторым запаздьшанием во времени и заста5 вит двигаться в пазах 42 цапфы 41 оси 40. При движении оси 40 вниз тяга 38 покатит ролик 36 по поверхности неподвижной направляющей рамы 13 и он освободит хвостовую часть
10 37 стопора 32. В это время гибкие тяговые элементы 19 и гибкие связи 55 ослабнут (провиснут).
Под действием силы пружины 15 рабочий орган 26 будет внедряться и
15 срезать слой грунта на морском дне. В конце хода вдоль рамы 1 рабочие органы 18 придут в контакт с пуансоном 30, который отсечет и подаст пробу донного грунта в эластичный чу20 лок 23. В процессе срезания грунта датчик 28 давления подаст сигнал записывающему блоку 56 и силы резания будут зарегистрированы.
25 Устройство можно поднимать на плавсредство, но при растяжении каната 7 шток 4 потянет планку 9, зажимы 51 и канаты 19. Пружина 15 сожмется, стопор 32 зафиксирует по3Q движную раму 14 при натйжении гибких связей 55 роликами 36. Устройство снова готово к работе, его мож- но перевести на тросе 7 без подъема на плавсредство в новые координаты и поставить на дно для даль- нейр;ей работы и взятия пробы.
Число взятых проб будет определяться длиной чулка 23 (его положения показаны в подвижной раме 14
пунктиром)
40
35
5
После заполнения чулка 23 пробами устройство поднимается на плавсредство, извлекает пробку 20 с пробами, устанавливается новьй чулок 23, считьшаются записи сил резания в за- письтающем блоке 56 и устройство снова готово к спуску на дно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования параметров грунтов | 1982 |
|
SU1051288A1 |
| Многоразовый пробоотборник | 1987 |
|
SU1493916A1 |
| Пробоотборник | 1988 |
|
SU1555635A1 |
| Устройство для отбора проб донных отложений | 1986 |
|
SU1322110A1 |
| Установка для формования радиально прессованных трубчатых изделий из бетонных смесей | 1988 |
|
SU1560424A1 |
| РЫХЛИТЕЛЬ УДАРНО-СКАЛЫВАЮЩЕГО ДЕЙСТВИЯ | 1990 |
|
RU2017901C1 |
| Ковш экскаватора-драглайна | 1987 |
|
SU1521835A1 |
| Многоразовый пробоотборник | 1988 |
|
SU1682856A1 |
| Устройство для извлечения трубы из грунта | 1983 |
|
SU1178845A1 |
| Дозатор | 1989 |
|
SU1758436A1 |
Составитель Р.Адиатурлина Редактор С.Патрушева Техред А.Кикемезей Корректор В.Бутяга
481/42 Тираж 470
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ППП Патент, г.Ужгород, ул.Проектная,4
Подпи
Фиг.З
Подписное
| Стенд для исследования подводногоРЕзАНия гРуНТОВ | 1979 |
|
SU846662A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для исследования параметров грунтов | 1982 |
|
SU1051288A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
