Изобретение относится к электртехнике,, а именно к устройствам для испытания электродвигат.елей и предназначено для обеспечения режимов ускоренных испытаний бесколлекторного злектродвигате- ля постоянного тока с .блоком управления.
Цель кзобретения - уменьшение времени испытаний.,
На фиг.1 представлена функциональная , схема предлагаемого - стенда; на фиг.2 . функциональная схема программно-вычислительного блока; на фиг.З схема регулируемого источника напряжения на - схема источника питания с блоком программного изменения тока.
Станд содерлшт управляемый электромапштный тормоз I с индуктором 2, установленным с возможностью поворота вокруг продольной оси обыотхой 3,, и с немагнктHbw ротором ч.
;вязаннь м с ротором
5 электродвигателя 6, На корпусе 7 электродвигателя 6 установлен вибропреобразователь 8, подключенный к виброизмерителю 9, соединенному с первым входом анализатора 10 спектра Выход анализатора 10 спектра подключен к первому входу программно-вычислительного блока i1, первый выход которого подклю-х чен к входу управляемого источника 12 напряжения, соединенного с входом датчика 13 тока. Первьш выход дат- -шка 13 тока подключен лс входу блока 14 управления двигателем 6. Второй выход программно- ныга1сли.тельного блока 1 1 подсоединен к входу программируемого генератора 15 сигналов, подключенного к второму входу анализатора 10 спектра. Причем второй выход датчика ;3 тока соединен с источником 16 питания с блоком программного изменения тока, подключенного к обмотке 3j и со вторым входом программно-вычислительного блока 11.
В качестве злектромагнитного тормоза 1 ыспользуется управляемый :;лектромагнитньм тормоз с ггодви/кн.ым индуктором 2 и немагнитным ротором 4 в комплекте любого типа, обес т::ечивающий требуемьш для данного типа испытуег-гого электродвигателя 6 с бяоко; . 14 управления нагружаюи)-1Й
элемент. Б качестве вибропреобразо- яателя 8 используется стандартный вибропреобразователь (например типа 1СП-I 5) . В качестве виброизмерите ля 9,используется стандартный виброизмеритель (например, типа N000 4)ирмы RFT), В анализатора 10 спектра используется стандартный анапизатор спектра (например, типа С4-48). При этом первый вход анализатора 10 спектра соответствует обозначению Вход на структурной схеме прибора С4-48,а второй вход соответствует обозначению Внешний, гетеродин , Второй вход предназначен для подачи гетеродинного сигнала от внешнего генератора, частота которого определяет частоту анализа спек- гра входного сигнгша. В качестве программируемого генератора 15 сигналов используется г енератор типа ГЗ-110,
Генератор сигналов низкочастотный прецезргонный ГЗ-110 представляет собой источник синусоидальных электрических колебаний с высокой точностью установки и стабильности частоты в диапазоне от 0,01 до 1999999,99 Гд и с дискретностью установки частоты 0,01 Гц.
В приборе обеспечена возможность дистанционной дискретной установки частоты в двоично-десятичном коде. Применение данного генератора позволяет производить измерение спектральных составляющих виб- рахщи на заданных частотах, которые вводятся в программно-вычисли- тельный блок 11, Совместное приме- менме программно-вычислительного блока i 1 и програь мируемого генератора 15 сигналов позволяет автоматизировать процесс измерения спектральных составляющих, выбор релсима испытаний и повысить точность вычисления коэфх ициента усиления (Кц/ и достоверность испытаний.
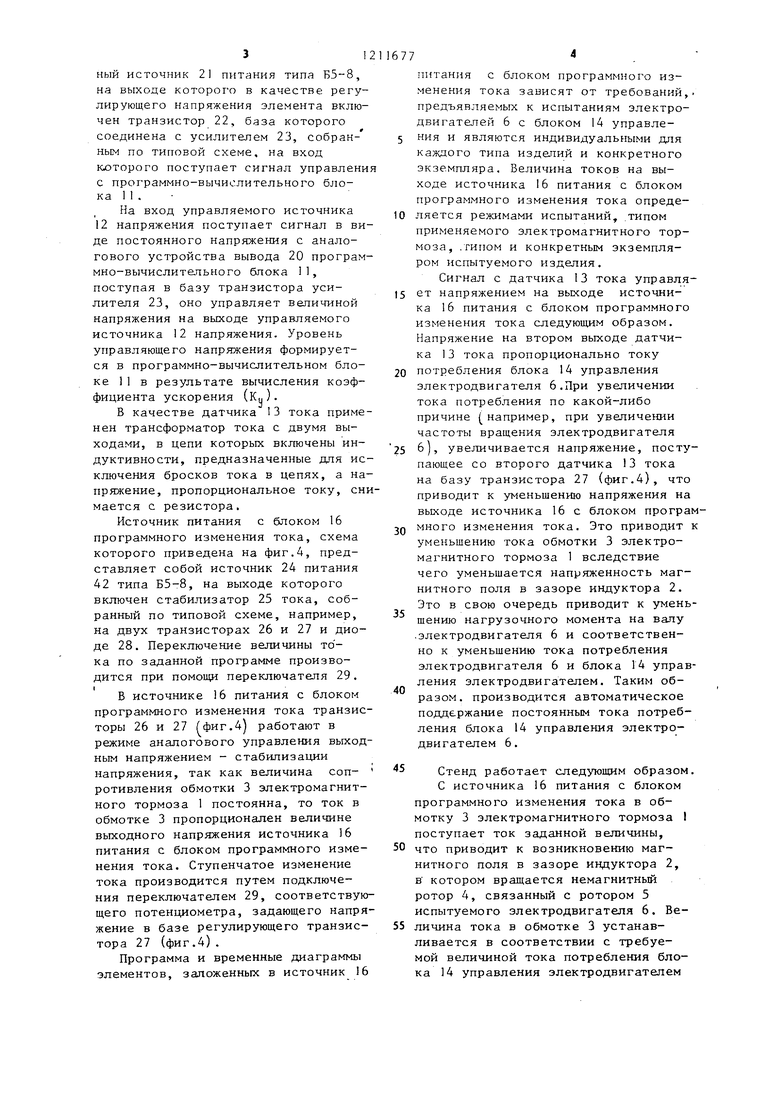
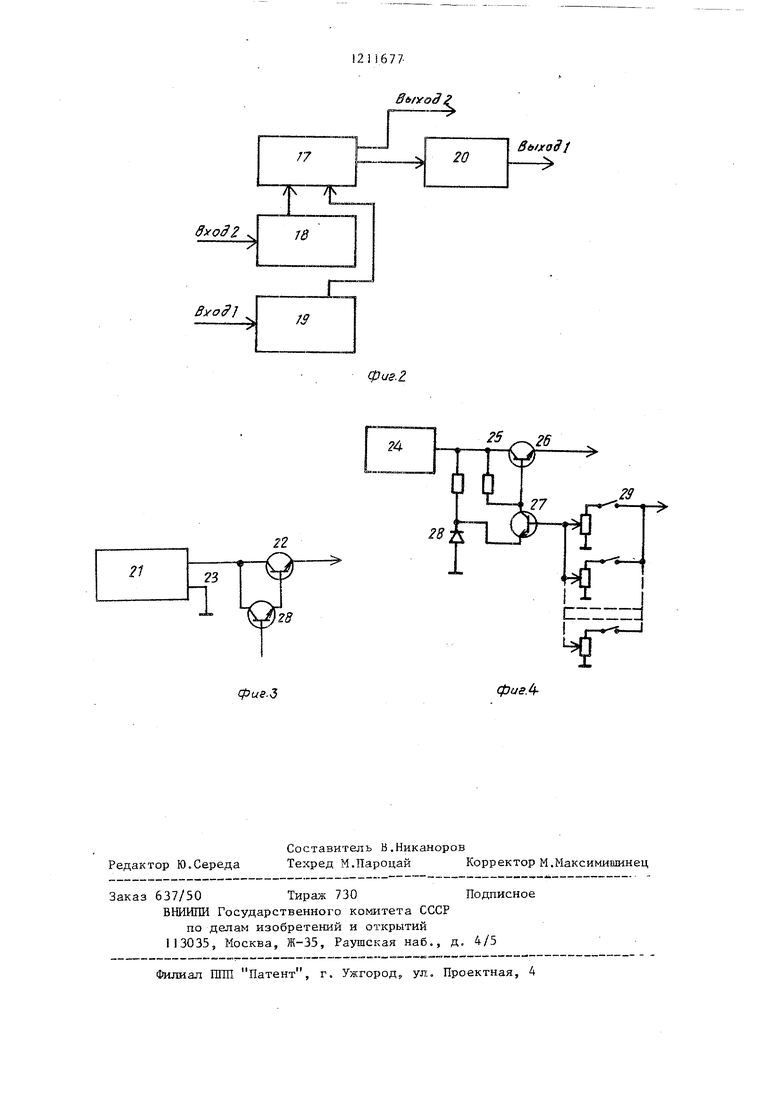
Программно-вычислительньй блок 1 1 5 ФyнкlJ oнaльrIaя схема которого представлена на фиг.2, состоит из -шкро-ЭВМ 17 типа Электроника-60, соединенной с двумя устройствами 18 и 19 аналогового ввода типа 1 ()/3-1 О и с устройством аналогового выЕЮда 20 типа 15КА-60/4-09, соединенного с выходом микро-ЭВМ 17,
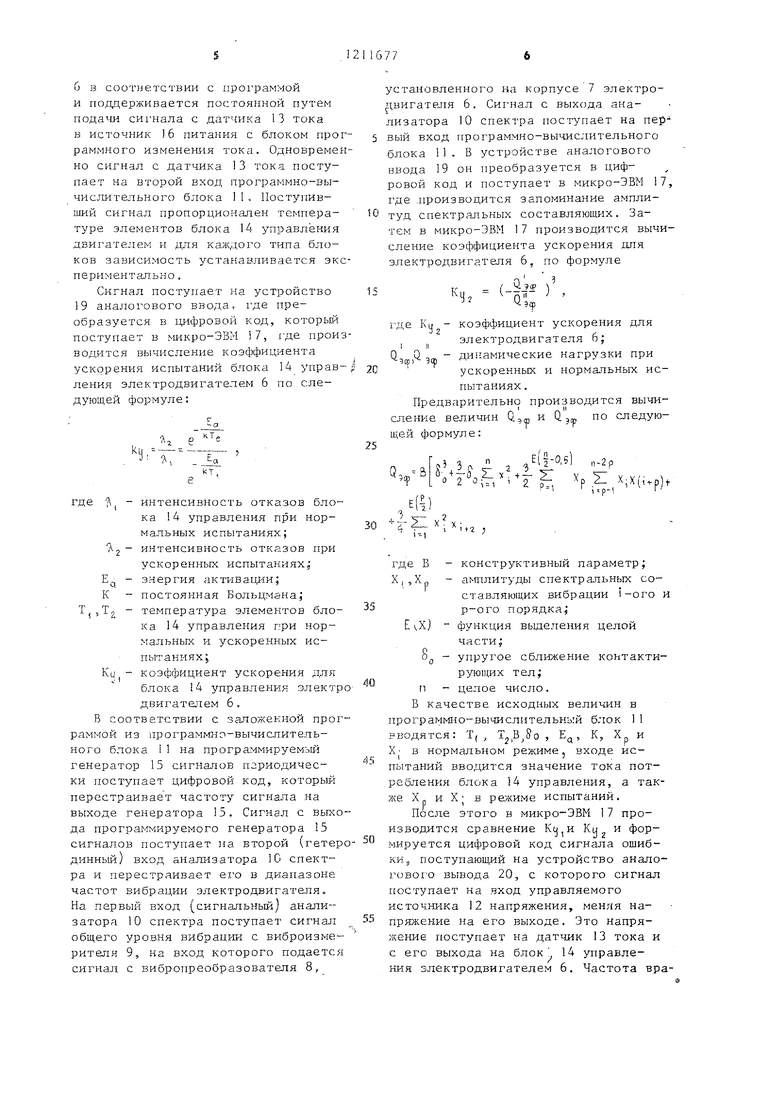
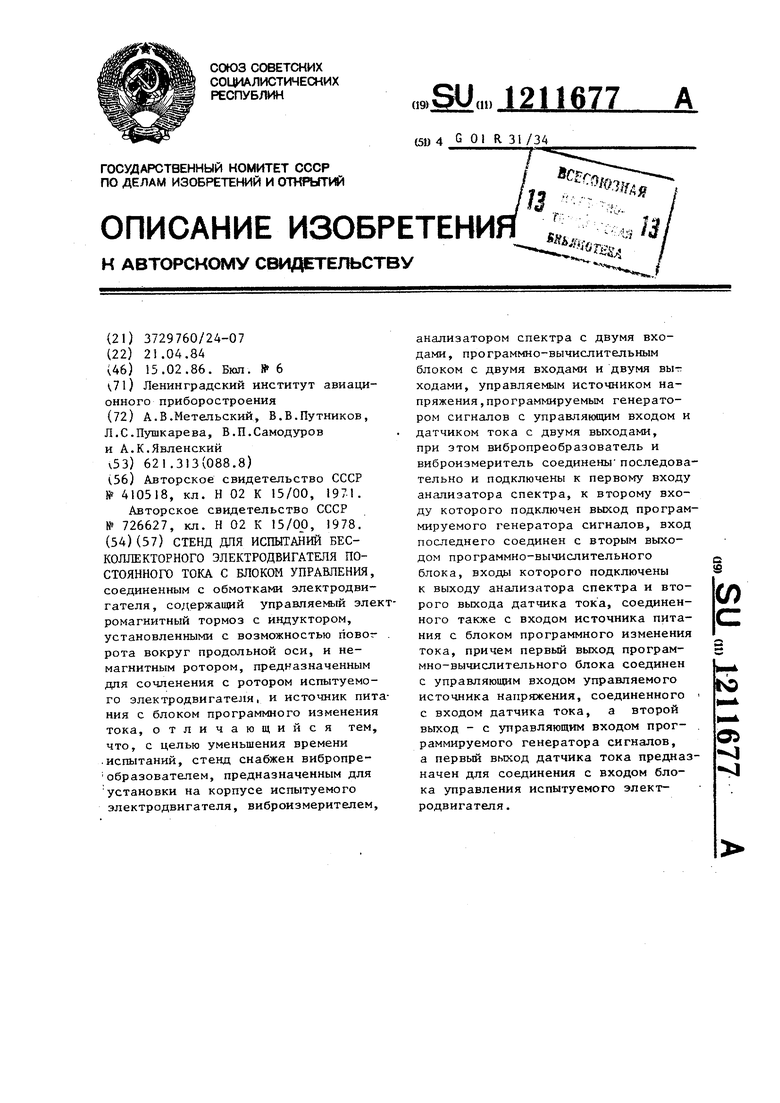
Управляемый источник 12 нагфяже- ппЯу схема которого приведена на (риг.З, представляет стандартный источник 21 питания типа Б5-8, на выходе которого в качестве регулирующего напряжения элемента включен транзистор 22, база которого соединена с усилителем 23, собран- ным по типовой схеме, на вход кюторого поступает сигнал управлени с программно-вычислительного блока 1 1 .
На вход управляемого источника 12 напряжения поступает сигнал в виде постоянного напряжения с аналогового устройства вывода 20 програм- мно-вычислитеяьного блока 11, поступая в базу транзистора усилителя 23, оно управляет величиной напряжения на выходе управляемого источника 12 напряжения. Уровень управляющего напряжения формируется в программно-вычислительном блоке 1 1 в результате вычисления коэффициента ускорения (Км).
В качестве датчика 3 тока применен трансформатор тока с двумя выходами, в цепи которых включены индуктивности, предназначенные для исключения бросков тока в цепях, а напряжение, пропорциональное току, снимается с резистора.
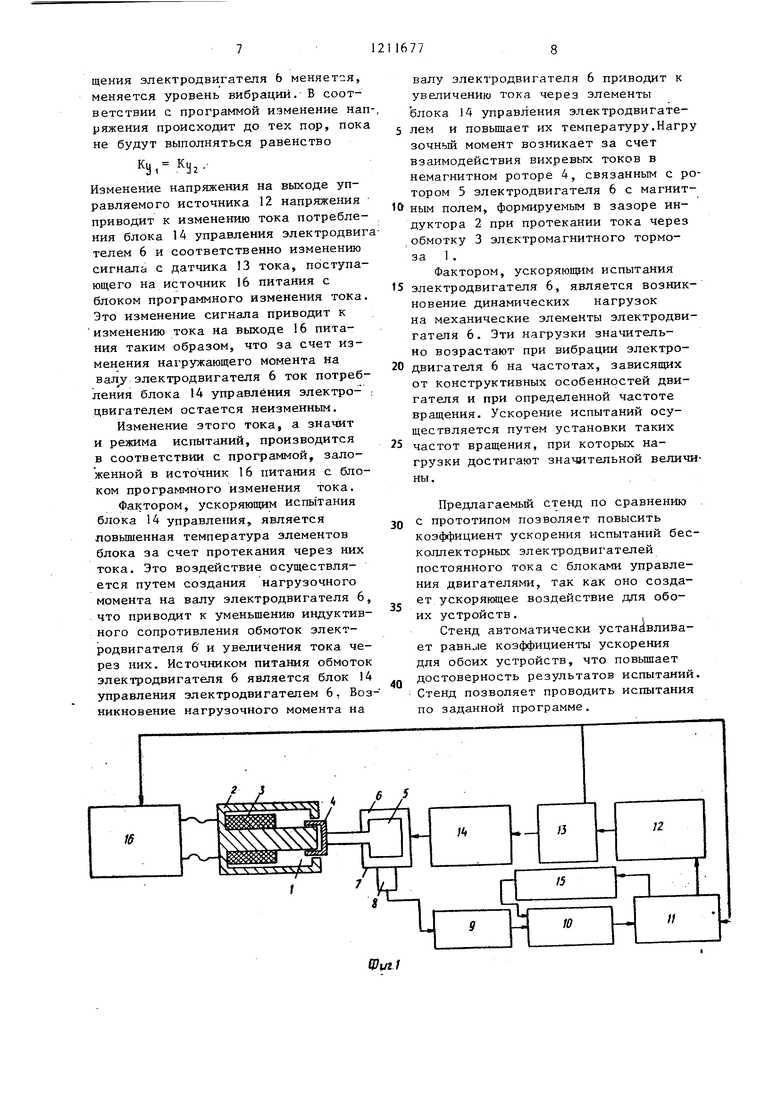
Источник питания с блоком 16 программного изменения тока, схема которого приведена на фиг.4, представляет собой источник 24 питания 42 типа Б5-8, на выходе которого включен стабилизатор 25 тока, собранный по типовой схеме, например, на двух транзисторах 26 и 27 и диоде 28. Переключение величины то - ка по заданной программе производится при помощи переключателя 29. Б источнике 16 питания с блоком программного изменения тока транзисторы 26 и 27 (фиг,4) работают в режиме аналогового управления выходным напряжением - стабилизации напряжения, так как величина соп- ротивления обмотки 3 электромагнитного тормоза 1 постоянна, то ток в обмотке 3 пропорционален величине выходного напряжения источника 16 питания с блоком программного изменения тока. Ступенчатое изменение тока производится путем подключения переключателем 29, соответствующего потенциометра, задающего напряжение в базе регулирующего транзистора 27 (фиг.4) .
Программа и временные диаграммы элементов, заложенных в источник 16
774
питания с блоком программного изменения тока зависят от требований,- предъявляемых к испытаниям электродвигателей 6 с блоком 14 управле- 5 ния и являются индивидуальными для каждого типа изделий и конкретного экземпляра. Величина токов на выходе источника 16 питания с блоком программного изменения тока опреде10 ляется режимами испытаний, .типом применяемого электромагнитного тормоза, .типом и конкретным экземпляром испытуемого изделия.
Сигнал с датчика 13 тока управля15 ет напряжением на вькоде источника 16 питания с блоком программного изменения тока следующим образом. Напряжение на втором выходе датчика 13 тока пропорционально току
20 потребления блока 14 управления электродвигателя 6.При увеличении тока потребления по какой-либо причине (например, при увеличении частоты вращения электродвигателя 5 6), увеличивается напряжение, поступающее со второго датчика 13 тока на базу транзистора 27 (фиг.4), что приводит к уменьшению напряжения на выходе источника 16 с блоком програмQ много изменения тока. Это приводит к уменьшению тока обмотки 3 электромагнитного тормоза 1 вследствие чего уменьшается напряженность магнитного поля в зазоре индуктора 2. Это в свою очередь приводит к уменьшению нагрузочного момента на валу .электродвигателя 6 и соответственно к уменьшению тока потребления электродвигателя 6 и блока 14 управления электродвигателем. Таким образом, производится автоматическое поддержание постоянным тока потребления блока 14 управления электродвигателем 6.
Стенд работает следуюш 1М образом.
С источника 16 питания с блоком программного изменения тока в обмотку 3 электромагнитного тормоза I поступает ток заданной величины,
0 что приводит к возникновению магнитного поля в зазоре индуктора 2, в котором вращается немагнитный ротор 4, связанный с ротором 5 испытуемого электродвигателя 6. Ве5 личина тока в обмотке 3 устанавливается в соответствии с требуемой величиной тока потребления блока 14 управления электродвигателем
5
0
о в соотнетствии с программой и по.ццерживается постоянной путем подачи сигнала с датчика 13 тока в источник 16 питания с блоком программного изменения тока. Одновременно сигнал с датчика 13 тока поступает на второй вход программно-вычислительного блока 11. Поступивший сигнал пропорционален температуре элементов блока 14 управления двигателем и для каждого типа блоков зависимость устанавливается экспериментально .
Сигнал поступает на устройство 19 аналогового ввода, где преобразуется в цифровой код, который поступает в м1-1кро-ЭВМ i7, где производится вычисление коэ4з4)ициента ускорения испытаний блока 14 управления электродвигателем 6 по следующей формуле;
g КТ.
ku ------ kT
где Д - интенсивность отказов блока 14 управления при нормальных испытаниях; 7-2 - интенсивность отказов при
ускоренных испытаниях, Е- - энергия активации; К - постоянная Больцмана; Т,,, - температура элементов блока 14 управления при нормальных и ускоренных испытаниях j KU| - коэффициент ускорения для
блока 4 управления электрдвигателем 6,
В соответствии с заложенной программой из програмьшо-вычислитель- ного блока 11 на программируемый генератор 15 сигналов пзриодичес- ки поступает цифровой код, который перестраивает частоту сигнала на выходе генератора 15. Сигнал с выхода программируемого генератора 15 сигналов поступает на второй (гетердинный) вход анализатора 1C спектра и перестраивает его в диапазоне частот вибрации электродвигателя. На первый вход (сигнальный) анализатора 10 спектра поступает сигнал общего уровня вибрации с виброизмерителя 9, на вход которого подается сигнал с вибропреобразователя 8,
установленного на корпусе 7 электро- Г1;вигателя 6. Сигнал с выхсща анализатора 10 спектра поступает на пер- 5 вый вход программно-вычислительного блока 11. В устройстве аналогового ввода 19 он преобразуется в цифровой код и поступает в микро-ЭВМ 17, где .производится запоминание ампли- 10 туд спектральных составляющих. Затем в микро-ЭВМ 17 производится вычисление коэффициента ускорения для электродвигателя 6, по формуле
КУ:
-
0
С
5
де Кц - коэффициент ускорения для электродвигателя 6; динамические нагрузки при ускоренных и нормальных испытаниях .
Предварительнсз производится вычисление вел.ичин О.,щ и Q,,,, по следую 9с Эср
щей формуле:
. 3
9ip
Bir4ii
Р 20
ST..
E(i-0,5)
р 1
Е
fP
i
it-z j
5
5
где В - конструктивный параметр; Х,,Х, - a mлитyды спектральных со- ставляю1цих вибрации i-oro и р-ого порядка; Е Ю - функция выделения целой
частиц Од - упругое сближение контактируюнщх тел; п - целое число. В качестве исходных величин в программно-вычислительный блок 11 вводятся: Т,, Т , Е, К, Хр и X; в нормальном режиме 5 входе испытаний вводится значение тока потребления блока 14 управления, а так- же X. и X; в режиме испытаний.
После этого в микро-ЭВМ 17 производится сравнение Кц.и Кц и фор
мируется цифровой код сигнала ошибки, поступающий на устройство аналогового вывода 20, с которого сигнал поступает на вход управляемого источника 12 напряжения, меняя на- прязкение на его выходе. Это напря- поступает на датчик 13 тока и с его выхода на блок 14 управления электродвигателем 6. Частота вращения электродвигателя 6 меняется, меняется уровень вибрации. В соответствии с программой изменение нап ряжения происходит до тех пор, пока не будут выполняться равенство
КН, .КУ,.
Изменение напряжения на выходе управляемого источника 12 напряжения приводит к изменению тока потребления блока 14 управления электродвигтелем 6 и соответственно изменению сигнала с датчика 13 тока, поступающего на источник 16 питания с блоком программного изменения тока. Это изменение сигнала приводит к изменению тока на выходе 16 питания таким образом, что за счет изменения нагружающего момента на валу электродвигателя 6 ток потребления блока 14 управления электро- двигателем остается неизменным.
Изменение этого тока, а значит и режима испытаний, производится в соответствии с программой, заложенной в источник 16 питания с блоком программного изменения тока.
Фактором, ускоряющим испь1тания блока 14 управления, является ловьшенная температура элементов блока за счет протекания через них тока. Это воздействие осуществляется путем создания нагрузочного момента на валу электродвигателя 6, что приводит к уменьшению индуктивного сопротивления обмоток электродвигателя 6 и увеличения тока через них. Источником питания обмоток электродвигателя 6 является блок 14 управления электродвигателем 6. Воз никновение нагрузочного момента на
валу электродвигателя 6 приводит к увеличению тока через элементы блока 14 управления электродвигате- 5 лем и повышает их температуру.Нагру зочный момент возникает за счет взаимодействия вихревых токов в немагнитном роторе 4, связанным с ротором 5 электродвигателя 6 с магнит0 ным полем, формируемым в зазоре индуктора 2 при протекании тока через ,обмотку 3 электромагнитного тормоза 1 .
Фактором, ускоряюш 1м испытания
5 электродвигателя 6, является возникновение динамических нагрузок на механические элементы электродвигателя 6. Эти нагрузки значительно возрастают при вибрации электро0 двигателя 6 на частотах, зависящих от конструктивных особенностей двигателя и при определенной частоте вращения. Ускорение испытаний осуществляется путем установки таких частот вращения, при которых нагрузки достигают значительной величины.
5
Предлагаемый стенд по сравнению с прототипом позволяет повысить коэффициент ускорения испытаний бесколлекторных электродвигателей постоянного тока с блоками управления двигателями, так как оно создает ускоряющее воздействие дпя обоих устройств.
Стенд автоматически устанавливает равнее коэффициенты ускорения для обоих устройств, что повьш1ает достоверность результатов испытаний. Стенд позволяет проводить испытания по заданной программе.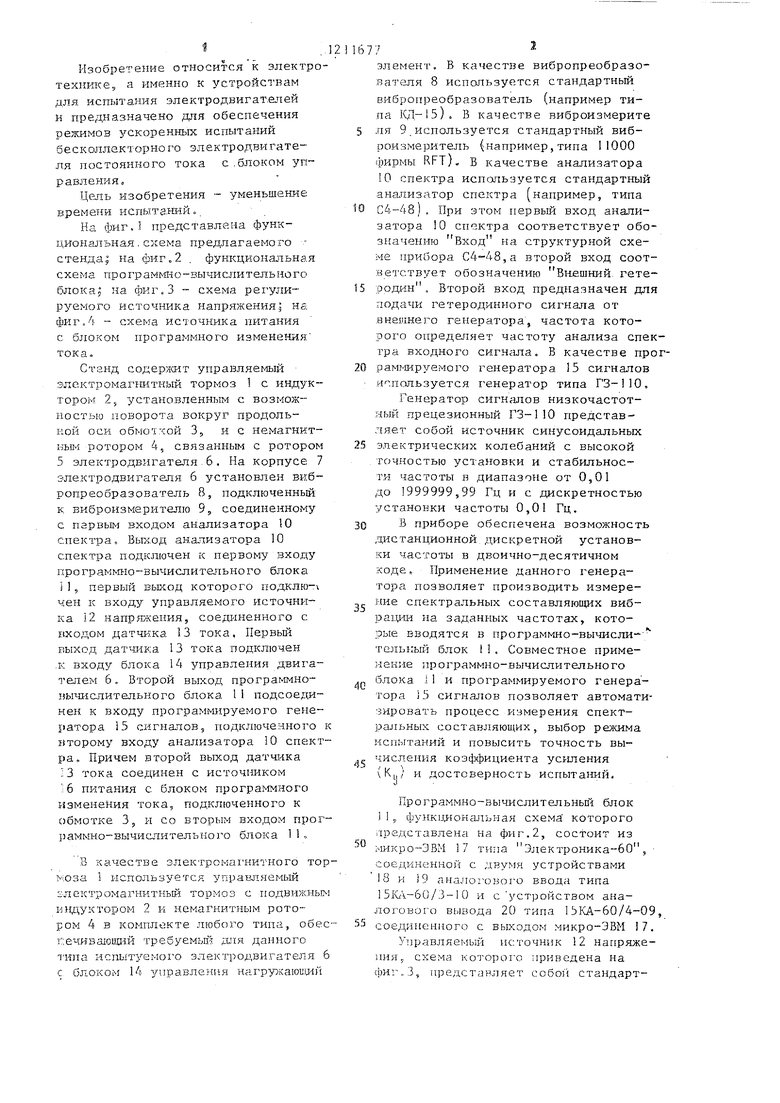
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прогнозирования ресурса электромеханических систем | 1985 |
|
SU1359859A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2011 |
|
RU2498258C2 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ ИСПЫТАНИЙ ДВИЖИТЕЛЕЙ АВТОНОМНЫХ ОБЪЕКТОВ | 2020 |
|
RU2739905C1 |
| СИСТЕМА МАЛОГАБАРИТНОГО РЕНТГЕНОВСКОГО ГЕНЕРАТОРА | 1990 |
|
SU1709883A1 |
| Стенд для испытаний элементов вертолета с соосными винтами | 2017 |
|
RU2664982C1 |
| Система для автоматизированного проведения испытаний полупроводниковых приборов | 2024 |
|
RU2830387C1 |
| Территориально-распределенный испытательный комплекс (ТРИКС) | 2018 |
|
RU2691831C1 |
| Стенд для испытания подшипников качения | 1987 |
|
SU1532832A1 |
| СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2477695C1 |
.4,4 / /
t / . / /
16
5 26
фие.З
Редактор Ю,Середа
Составитель В.Никаноров
Техред М.ПароцайКорректор М.Максимишинец
637/50Тираж 730Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и оогкрытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Филиал ШШ Патент, г, Ужгород ул Проектная, 4
фие.
| 1971 |
|
SU410518A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Нагрузочное устройство для испытания электродвигателей | 1978 |
|
SU726627A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
