Изобретение относится к устройствам проведения испытаний движителей автономных объектов (АО), к которым, в частности, могут быть отнесены автономные колесные и гусеничные транспортные средства, беспилотные летательные аппараты и автономные малые космические аппараты. В качестве объекта проведения испытаний могут быть рассмотрены лопастные винты с фиксированным или изменяемым геометрическим шагом.
Известен электромеханический стенд [RU №179254, G01M 9/00, опубл. 07.05.2018], предназначенный для изучения аэродинамических характеристик объектов, осуществляющих движение по различным законам динамики. Стенд включает в себя модель самолета, закрепленную с помощью внутримодельного узла с динамометром на горизонтальном вале, Г-образную раму с верхним и нижним подшипниковыми узлами, электрическую платформу, включающую верхнее и нижнее основания, электроприводы, блок управления и питания электроприводами.
Недостатком данного стенда является то, что он обеспечивает регистрацию сил и моментов сил, действующих на движитель автономного объекта только в направлении одной из трех осей системы координат, связанной с объектом испытаний системой координат, так как в электромеханическом стенде присутствует только один динамометр. Кроме того данный стенд не обеспечивает регистрацию параметров функционирования движителей автономных объектов, а именно, измерения крутящего момента, оборотов, мощности на приводных валах движителей и вибрационных характеристик.
Также известен стенд для испытаний подъемной тяги винтов беспилотного летательного аппарата [RU №186022, G01L 5/13, В64С 11/00, опубл. 26.12.2018]. Стенд включает в себя защитную раму, двуплечий рычаг в виде прямоугольной балки с закрепленным на нем электродвигателем, тензодатчик, установленный на другом конце двуплечего рычага, аккумулятор и контроллер, которые закреплены на двуплечем рычаге, персональный компьютер.
Недостатком данного стенда является то, что он обеспечивает регистрацию сил и моментов сил, действующих на движитель автономного объекта только в направлении одной из трех осей системы координат связанной с объектом испытаний системой координат, так как в стенде присутствует только один тензодатчик. Также данный стенд не обеспечивает регистрацию параметров функционирования движителей автономных объектов, а именно, измерения крутящего момента, оборотов, мощности на приводных валах движителей и вибрационных характеристик.
Наиболее близким по технической сущности к заявляемому устройству является устройство [RU №186209, G01M 15/00, Н02K 11/20, опубл. 11.01.2019] тестирования бесколлекторных электродвигателей беспилотных летательных аппаратов.
Известное устройство тестирования бесколлекторных электродвигателей беспилотных летательных аппаратов содержит вычислительный модуль с программным обеспечением для воспроизведения программы испытаний и хранения результатов, модуль управления и регистрации характеристик, датчик оборотов винта, датчик тяги, датчик потребляемого электродвигателем тока, регулятор оборотов, датчик напряжения питания регулятора оборотов, электродвигатель с винтом. Вычислительный модуль с программным обеспечением для воспроизведения программы испытаний и хранения результатов соединен линией связи с модулем управления и регистрации, а информационные выходы датчика оборотов винта, датчика тяги, датчика напряжения питания регулятора оборотов, датчика потребляемого электродвигателем тока подключены к информационным входам модуля управления и регистрации характеристик. Датчик тяги имеет тензометрический принцип работы, а датчик оборотов винта - оптический принцип работы.
Недостатком данного устройства является то, что оно обеспечивает регистрацию сил и моментов сил, действующих на движитель автономного объекта только в направлении одной из трех осей системы координат связанной с объектом испытаний системой координат, так как в стенде присутствует только один датчик тяги, также данное устройство не обеспечивает регистрацию вибрационных характеристик объекта испытаний.
Технический результат заключается в обеспечении возможности осуществления процесса испытаний движителей автономных объектов в автоматическом режиме, что позволяет подобрать оптимальные параметры движителя автономных объектов, сократить затраты при изготовлении, проведении комплексных испытаний систем автономных объектов.
Указанный технический результат достигается тем, что в устройстве автоматизации испытаний движителей автономных объектов, включающем вычислительный модуль с программным обеспечением для воспроизведения программы испытаний и хранения результатов, модуль управления и регистрации характеристик, датчик потребляемого электродвигателем тока, датчик оборотов винта, датчик тяги, датчик напряжения питания регулятора оборотов, при этом вычислительный модуль с программным обеспечением для воспроизведения программы испытаний и хранения результатов соединен линией связи с модулем управления и регистрации, а информационные выходы датчика оборотов винта, датчика тяги, датчика напряжения питания регулятора оборотов, датчика потребляемого электродвигателем тока подключены к соответствующим информационным входам модуля управления и регистрации характеристик посредством информационной шины, новым является то, что дополнительно содержит не менее пяти дополнительных датчиков тяги, размещенных на подвижных стойках параллельного манипулятора с октаэдральной компоновкой стоек с жестко закрепленными на нем электродвигателем с винтом, на приводном валу которого размещен датчик оборотов винта и дополнительный датчик крутящего момента, а непосредственно на платформе в точках крепления подвижных стоек закреплены датчики вибрации, при этом информационные выходы дополнительных датчиков тяги, датчиков вибрации и датчика крутящего момента подключены к информационным входам модуля управления и регистрации характеристик посредством информационной шины.
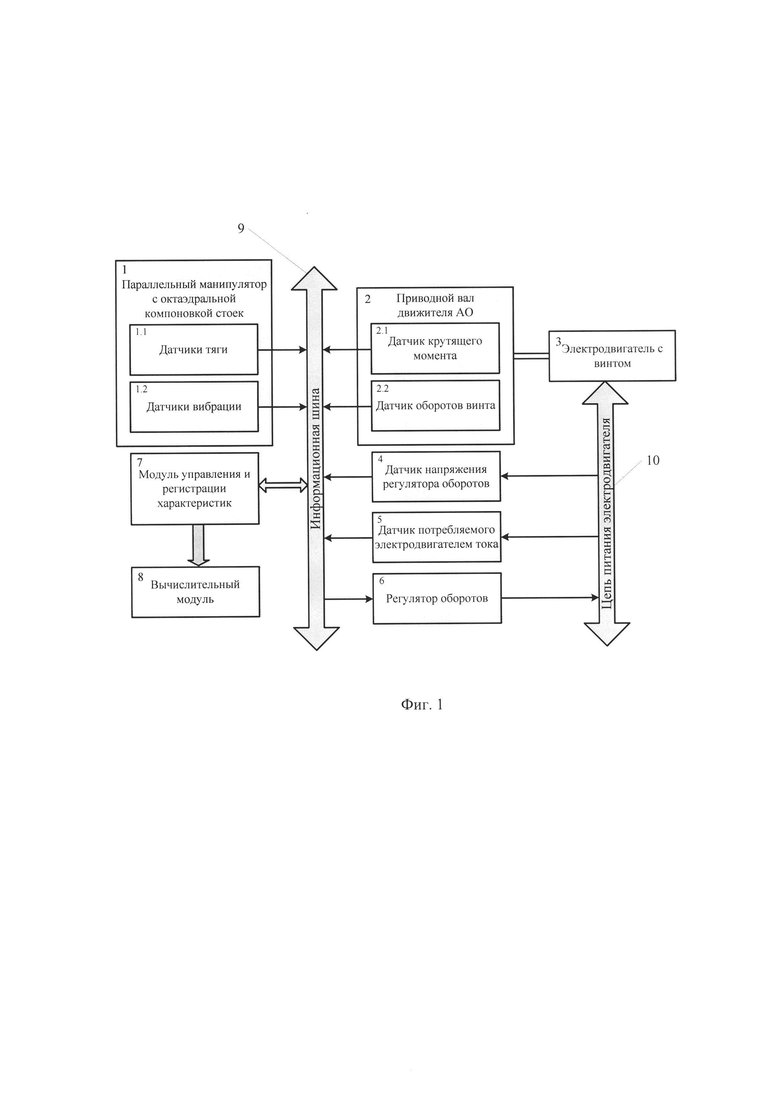
Сущность предлагаемого технического решения поясняется чертежом, где на фиг. 1 показана структурная схема заявляемого устройства автоматизации испытаний движителей автономных объектов.
Предлагаемое устройство автоматизации испытаний движителей автономных объектов включает в себя параллельный манипулятор с октаэдральной компоновкой стоек 1 с размещенными на нем датчиками тяги 1.1 и датчиками вибрации 1.2, электродвигатель с винтом 3, на приводном валу 2 которого размещены датчик крутящего момента 2.1 и датчик оборотов винта 2.2, датчик напряжения регулятора оборотов 4, датчик потребляемого электродвигателем тока 5, регулятор оборотов 6, модуль управления и регистрации характеристик 7, вычислительный модуль 8, информационную шину 9 и цепь питания электродвигателя 10.
Чувствительные элементы датчиков напряжения регулятора оборотов 4 и потребляемого электродвигателем тока 5, а также управляющий выход регулятора оборотов 6 соединены с цепью питания электродвигателя 10. Информационные выходы датчиков тяги 1.1, датчиков вибрации 1.2, датчика крутящего момента 2.1, датчика оборотов винта 2.2, датчика напряжения регулятора оборотов 4 и датчика потребляемого электродвигателем тока 5 соединены посредством информационной шины 9 с соответствующими информационными входами модуля управления и регистрации характеристик 7, первый выход которого соединен с входом вычислительного модуля 8, а второй выход соединен с информационным входом регулятора оборотов 6 посредством информационной шины 9.
Датчики тяги 1.1 могут быть реализованы по тензометрическому принципу работы с мостовым выходным сигналом. Датчики вибрации 1.2 могут быть реализованы по пьезометрическому принципу работы с зарядовым выходом. Датчик крутящего момента 2.1 может быть реализован по тензометрическому или магниторезистивному принципу работы. Датчик оборотов винта 2.2 может иметь оптический принцип. Датчики напряжения регулятора оборотов 4 и потребляемого электродвигателем тока 5 могут быть реализованы по компенсационному принципу на эффекте Холла.
Электродвигатель с винтом 3 представляет собой бесколлекторную электрическую машину постоянного тока, на приводном валу 2 которой может быть размещен лопастной винт с фиксированным или изменяемым геометрическим шагом, а также датчики крутящего момента 2.1 и оборотов винта 2.2. Также на приводном валу 2 могут быть размещены элементы движителей иных типов, обеспечивающих преобразование вращательного движения приводного вала 2 в поступательное движение автономного объекта: колесный движитель, ведущее колесо гусеничного или полугусеничного движителей и др.
Принцип функционирования регулятора оборотов 6 может быть основан на широтно-импульсной манипуляции выходного управляющего напряжения.
Параллельный манипулятор с октаэдральной компоновкой стоек 1 известен из уровня техники как платформа Гью-Стюарта и состоит из неподвижного основания, подвижной платформы и шести подвижных стоек, соединенных с неподвижным основанием и подвижной платформой сферическими шарнирами. В точке центра масс каждой из подвижных опор размещены датчики тяги 1.1, а непосредственно на подвижной платформе в точках крепления сферических шарниров размещены датчики вибрации 1.2.
Модуль управления и регистрации характеристик 7 может быть реализован в виде программного модуля с использованием системы моделирования и сбора данных LabVIEW (National Instruments, США) на базе встроенных в систему LabVIEW функций формирования измерительных и управляющих каналов ввода-вывода аналоговых и цифровых сигналов, входящих в состав модуля NI-DAQ, загружаемого в среду серийной персональной ЭВМ (ПЭВМ).
Модуль управления и регистрации характеристик 7 используется в сочетании с серийными аппаратными средствами аналогового и цифрового ввода сигналов производства компании National Instruments, таких как аналого-цифровой преобразователь напряжения PXIe-4302, измерительный модуль резистивных мостовых схем PXIe-4339, модуль цифрового ввода-вывода PXIe-6537, измерительный модуль акустических и вибрационных сигналов PXIe-4464.
Вычислительный модуль может быть выполнен в виде загружаемого в среду ПЭВМ модуля, реализованного базе системы моделирования и сбора данных LabVIEW на базе встроенных в систему LabVIEW функций по математической обработке результатов измерений, визуализации и протоколирования полученных результатов.
Процесс функционирования заявляемого устройства автоматизации испытаний движителей автономных объектов рассмотрим на примере процесса проведения испытаний движителя беспилотного летательного аппарата БПЛА с винтом фиксированного геометрического шага (ВФШ).
Перед началом процесса проведения испытаний пользователем посредством графического интерфейса модуля управления и регистрации характеристик 7 задается требуемая частота вращения приводного вала 2 движителя БПЛА.
Для дальнейшего считывания параметров движителя БПЛА необходимо предварительно задать параметры измерительных каналов и первичного преобразования полученных от датчиков 1.1, 1.2, 2.1, 2.2, 4 и 5 значений напряжения и тока в соответствующие им значения параметров функционирования движителя БПЛА:
- силы, воздействующие на подвижные стойки параллельного манипулятора 1;
- вибрационные ускорения, воздействующие на подвижную платформу параллельного манипулятора 1;
- крутящий момент, развиваемый на приводном валу 2 движителя БПЛА;
- число оборотов приводного вала 2 движителя БПЛА;
- выходное напряжение регулятора оборотов 6 электродвигателя с винтом 3;
- ток потребления электродвигателя с винтом 3.
Ввод параметров измерительных каналов и первичного преобразования значения напряжения и тока осуществляется с помощью графического интерфейса модуля управления и регистрации характеристик 7. Данный модуль предоставляет пользователю предлагаемого устройства автоматизированных испытаний движителей БПЛА следующие функциональные возможности по регистрации характеристик движителя БПЛА:
- ввод значения напряжения питания датчиков;
- ввод значений коэффициентов преобразования полученных от датчиков значений напряжения и тока в значения параметров функционирования движителя БПЛА;
- ввод значения наибольшего предела измерения датчиков.
- формирование временных диаграмм текущих значений напряжений и токов, получаемых от датчиков;
- формирование временных диаграмм текущих значений параметров функционирования движителей БПЛА.
В том случае, если все необходимые параметры были введены пользователем, выполняется формирование измерительных каналов с использованием встроенных функций непрерывного буферизированного сбора данных модуля NI-DAQ. После того, как процедура формирования измерительных каналов была выполнена, и требуемая частота вращения приводного вала движителя БПЛА задана, пользователь инициирует начало процесса испытаний путем нажатия на соответствующую кнопку, расположенную на интерфейсе модуля управления и регистрации характеристик 7, при этом на управляющем выходе регулятора оборотов 6 формируется напряжение питания электродвигателя с винтом 3, значение которого соответствует предварительно заданному числу оборотов приводного вала 2 движителя БПЛА.
Непосредственно в ходе процесса проведения испытаний движителя БПЛА модулем управления и регистрации характеристик 7 осуществляется циклический опрос информационных выходов датчиков тяги 1.1, вибрации 1.2, крутящего момента 2.1, оборотов винта 2.2, напряжения регулятора оборотов 4 и потребляемого электродвигателем тока 5. Одновременно с получением значений тока и напряжения от датчиков осуществляется их первичное преобразование в модуле управления и регистрации характеристик 7 с последующей передачей значений параметров функционирования движителя БПЛА в вычислительный модуль 8.
Вычислительный модуль 8 обеспечивает выполнение следующих вычислительных процедур:
- расчет компонентов главного вектора сил и главного момента сил, развиваемых движителем БПЛА - воздушным винтом;
- расчет углов пространственной ориентации (углов Эйлера) подвижной платформы параллельного манипулятора 1;
- спектральный анализ вибрационных ускорений подвижной платформы параллельного манипулятора и расчет параметров гармоник вибрационных ускорений;
- визуализация гармоник спектра вибрационных ускорений подвижной платформы параллельного манипулятора 1;
- визуализация главного вектора сил, главного момента сил и пространственной ориентации подвижной платформы относительно неподвижной системы координат.
Для выполнения расчета компонентов главного вектора сил, главного момента сил и углов пространственной ориентации подвижной платформы пользователю необходимо ввести параметры геометрии параллельного манипулятора 1 в состоянии покоя, а именно: диаметр неподвижного основания и подвижной платформы параллельного манипулятора, высота параллельного манипулятора в состоянии покоя, расположение точек крепления подвижных стоек, представленных в цилиндрической системе координат.
Расчет компонентов главного вектора сил, главного момента сил и углов пространственной ориентации подвижной платформы осуществляется путем решения обратной задачи динамики параллельного манипулятора, методы решения которой изложены, в частности, в [Андриевский Б. Р. и др. Динамика платформы Стюарта // Вестник Санкт-Петербургского университета. Математика. Механика. Астрономия. - 2017. - Т. 4(62). - Вып. 3. - С. 489-505]. Спектральный анализ вибрационных ускорений подвижной платформы параллельного манипулятора осуществляется с использованием метода кратковременного оконного преобразования Фурье, изложенного, в частности, в [Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М. Техносфера, 2012. 1048 с.].
Вычислительные процедуры осуществляются в режиме реального времени по мере поступления значений параметров функционирования движителя БПЛА от модуля управления и регистрации характеристик 7. Визуализация главного вектора сил, главного момента сил, пространственной ориентации подвижной платформы и гармоник спектра вибрационных ускорений подвижной платформы также осуществляется в режиме реального времени. Результаты проведенных вычислений сохраняются в текстовых файлах и могут использоваться для последующего анализа.
Процесс проведения испытаний движителей автономных объектов иных типов, в частности, колесных и гусеничных транспортных средств, не имеет существенных отличий от рассмотренного ранее процесса проведения испытаний движителя беспилотного летательного аппарата БПЛА с винтом фиксированного геометрического шага.
Таким образом, предлагаемое устройство автоматизации испытаний движителей автономных объектов позволяет в автоматическом режиме проводить испытания движителей автономных объектов различных типов с формированием вектора сил и момента сил в трехмерной системе координат, связанной с осью вращения приводного вала движителя, регистрацию и спектральный анализ вибрационных ускорений, порождаемых движителем АО в процессе функционирования, что позволяет подобрать оптимальные геометрические характеристики движителя АО, сократить временные и материальные затраты при изготовлении и проведении комплексных испытаний систем автономных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| Способ испытаний судовых движительных комплексов и стенд для его осуществления | 2023 |
|
RU2817909C1 |
| Стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации | 2022 |
|
RU2781047C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| МОДУЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2816463C1 |
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| Стенд для испытаний элементов вертолета с соосными винтами | 2017 |
|
RU2664982C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
Изобретение относится к устройствам проведения испытаний движителей автономных объектов (АО), к которым, в частности, могут быть отнесены автономные колесные и гусеничные транспортные средства, беспилотные летательные аппараты и автономные малые космические аппараты. В качестве объекта проведения испытаний могут быть рассмотрены лопастные винты с фиксированным или изменяемым геометрическим шагом. Устройство автоматизации испытаний движителей автономных объектов включает в себя параллельный манипулятор с октаэдральной компоновкой стоек (1) с размещенными на нем датчиками тяги (1.1) и вибрации (1.2), электродвигатель с винтом (3), на приводном валу (2) которого размещены датчики крутящего момента (2.1) и оборотов винта (2.2), датчик потребляемого электродвигателем тока (5), регулятор оборотов (6), датчик напряжения регулятора оборотов (4), модуль управления и регистрации характеристик (7) и вычислительный модуль (8). Технический результат - обеспечение возможности осуществления процесса испытаний движителей автономных объектов в автоматическом режиме. 1 ил.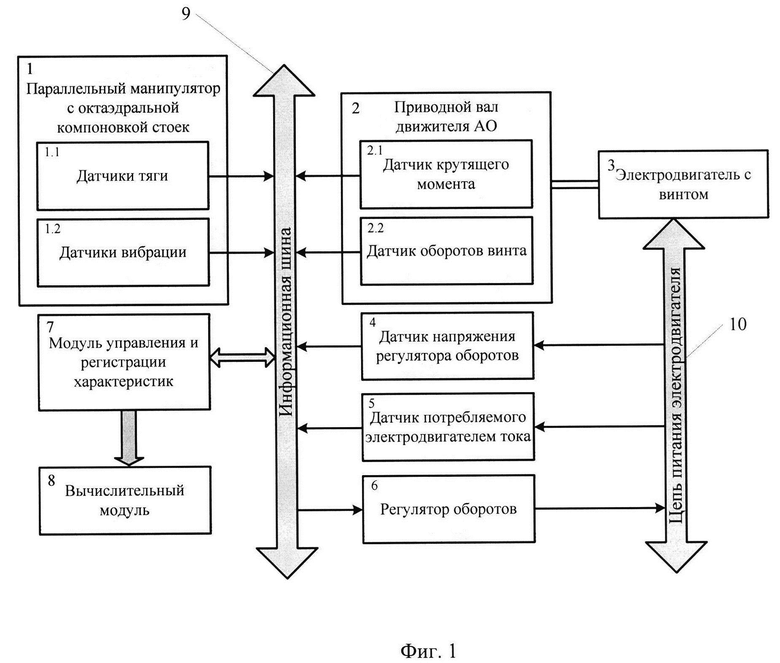
Устройство автоматизации испытаний движителей автономных объектов, включающее вычислительный модуль с программным обеспечением для воспроизведения программы испытаний и хранения результатов, модуль управления и регистрации характеристик, датчик потребляемого электродвигателем тока, датчик оборотов винта, датчик тяги, датчик напряжения питания регулятора оборотов, при этом вычислительный модуль с программным обеспечением для воспроизведения программы испытаний и хранения результатов соединен линией связи с модулем управления и регистрации, а информационные выходы датчика оборотов винта, датчика тяги, датчика напряжения питания регулятора оборотов, датчика потребляемого электродвигателем тока подключены к соответствующим информационным входам модуля управления и регистрации характеристик посредством информационной шины, отличающееся тем, что дополнительно содержит не менее пяти дополнительных датчиков тяги, размещенных на подвижных стойках параллельного манипулятора с октаэдральной компоновкой стоек с жестко закрепленными на нем электродвигателем с винтом, на приводном валу которого размещен датчик оборотов винта и дополнительный датчик крутящего момента, а непосредственно на платформе в точках крепления подвижных стоек закреплены датчики вибрации, при этом информационные выходы дополнительных датчиков тяги, датчиков вибрации и датчика крутящего момента подключены к информационным входам модуля управления и регистрации характеристик посредством информационной шины.
| СТЕНД ДЛЯ ИЗНОСНЫХ ИСПЫТАНИЙ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728216C1 |
| Устройство для контроля и отбраковки протекающей жидкости | 1958 |
|
SU130706A1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДОВ И ДВИЖИТЕЛЕЙ ДЕЙСТВУЮЩИХ МОДЕЛЕЙ БПЛА | 2014 |
|
RU2594048C2 |
| CN 110389035 A, 29.10.2019 | |||
| CN 103604608 B, 13.04.2016. | |||

