1
Изобретение относится к техническим средствам коррекции систем автоматического управления и может найти широкое применение в системах автоматического управления парогенераторами.
Цель изобретения - повышение т очности устр ой ст ва,
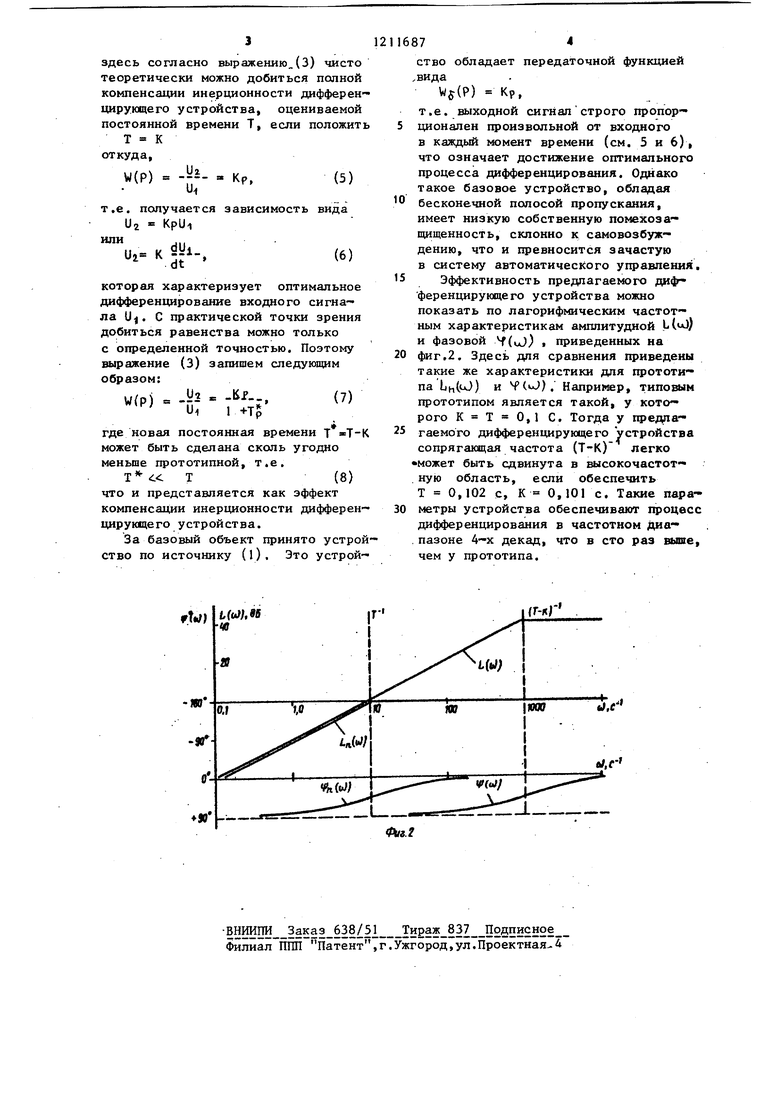
На фиг.1 приведена принципиальна электрическая схема пр ёдпагаемого устройства; на фиг.2- логарифмические частотные характеристики предлагаемого устройства. .
Устройство содержит второй операционный усилитель 1, пятый резистор 2, конденсатор 3, четвертый резистор 4, первый операционный усили- тель 5, третий, второй и первый резисторы 6-8.
На фиг,2 приняты следующие обозначения: U, U2 входной и выходной сигналы устройства; L(iJj, V(tJ) - амплитудная и фазовая характеристики устройства; Lf,tiJ) амплитудная и фазовая характеристик прототипа.
Таким образам, дифференцирукяцее устройство содержит охваченный глубокой отрицательной обратной связью через резистор 2 второй операционный, усилитель 1, на вход которого подключена цепь, состоящая из последовательно соединенных конденсатора 3 и резистора 4, а ; также первый с глубокой отрицательной обратной связью операционный усилитель 5, в котором эта связь реализована через резистор 6. При этом выход второго операционного усилителя, являющийся выходом устройства, через резистор 7 соединен с входом первого операционного усилителя 5, на который также подключен резистор 8, обеспечивающий вход устройства в целом, а выход первого операционного усилителя 5 соединен с входом второго операционного усилителя 1 через цепь, состоящую из последовательно соединенных конденсатора 3 и резистора 4.
Дифференцирующее устройство функционирует следующим образом.
Входной сигнал + U/ подается на резистор 8, который подключен к входу первого операционного усилителя 5, охваченного глубокой отрицательной обратной связью.
7
через резистор 6. Выходной сигнал устройства Ut подается на вход первого усилителя, образованного операционным усилителем 5 и резисторами 6 и 7 и работающего в режиме инвертора, так как сопротивление 7 на его входе равно сопротивлению глубокой отрицательной обратной связи 6, которой охвачен первый
операционный усилитель 5.
Сигнал (и,, + Ui) с выхода усилителя, образованного первым операционным усилителем 5 и резисторами 6 и 7, подается на вход вто-
рого операхцюнного усилителя 1 через цепь, состоящую из последовательно соединенных конденсаторов 3 и резистора 4. Во втором усилителе, образованном операционным усилителем 1, резисторами 2 и 4 и конденсатором 3, выполняется операция, которая может быть описана соотношением
- .Rj. .1- Ср
-1- R.
-(и, + uj
Rt СР
(Ui - иг), 1+ RiCp
откуда получаем формулу UaК
- - - - - - - 31 м - 1.-.
(1)
Ui + Uz 1 + Тр где R, и .R-2 - сопротивление чет-
вертого и пятого резисторов 4 и 2; С - емкость конденсатора 3.
Тогда из выражения (1) можно получить зависимость
(1 + Tp)Uj Кр (и, + иг) или после группировки подобных членов,
(1 - Тр - Кр)иг KpU,. (2)
Выражение (2) дает возможность записать передаточную функцию предлагаемого дифференцирующего устройства в виде
W(P) --- - ---Р(1)
и, LU (T-k)p.
т.е. показать, что при функционировании действительно идет процесс дифференцирования входного сиг- нала U. Однако в отличие от прото-. типа, передаточная.функция которого
ы (р) .К.Р..
1+Тр(4)
здесь согласно выражению,(З) чисто теоретически можно добиться полной компенсации инерционности дифференцирующего устройства, оцениваемой постоянной времени Т, если положить
Т К откуда,
W(P) Кр,(5)
т.е. получается зависимость вида Uj - KpUi
dU,.
Ui К
dt
(6)
которая характеризует оптимальное дифференцирование входного сигнала U|. С практической точки зрения добиться равенства можно только с определенной точностью. Поэтому выражение (3) запишем следующим образом:
.Уз .Kf...(7)
W{p)
Ui 1 +1$
где новая постоянная времени может быть сделана сколь угодно меньше прототипной, т.е.
«
(8)
что и представляется как эффект компенсации инерционности дифферен- цирукщего устройства.
За базовый объект принято устройство по источнику (1). Это устрой10
15
116874
ство обладает передаточной функцией ,вида
V(j(P) Кр,
т.е. выходной сигнап строго пропор- 5 ционален произвольной от входного в каждый момент времени (см. 5 и 6), что означает достижение оптимального процесса дифференцирования. Однако такое базовое устройство, обладая бесконечной полосой пропускания, имеет низкую собственную помехозащищенность, склонно к самовозбуждению, что и превносится зачастую в систему автоматического управления.
Эффективность предлагаемого ди ференцирующего устройства можно показать по лагорифмическим частотным характеристикам амплитудной L-(u)) и фазовой Af(ij) , приведенных на фиг,2. Здесь для сравнения приведены такие же характеристики для прототипа LhW) и y(J). Например, типовым прототипом является такой, у которого К Т 0,1 С. Тогда у предла25 гаемого дифференцирующего устройства
сопрягающая частота (Т-К) легко «может быть сдвинута в высокочастотную область, если обеспечить Т 0,102 с, К 0,101 с. Такие пара30 метры устройства обеспечивают 1ч оцвсс дифференцирования в частотном диапазоне 4-х декад, что в сто раз выше, чем у прототипа.
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Квазиуравновешенный мост для измерения параметров четырехэлементных RLC-двухполюсников | 1986 |
|
SU1404957A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2212052C2 |
| Дифференцирующее устройство | 1983 |
|
SU1161962A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| ПИКОВЫЙ ДЕТЕКТОР | 2000 |
|
RU2156028C1 |
| Активный RC-фазовый контур | 1980 |
|
SU964978A1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА С ГЛУБОКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2316731C1 |
| Активный RC-фазовый контур | 1984 |
|
SU1343547A1 |
| Электронный сейсмометр | 1987 |
|
SU1518816A1 |

«rrrrrrz:
.г
(г-«;
-I
| Бесекерский В.А | |||
| и Попов Е.П | |||
| Теория систем автоматического регулирования | |||
| М.: Наука, 1972, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Там же, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Там же, с | |||
| Регулятор давления для автоматических тормозов с сжатым воздухом | 1921 |
|
SU195A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
