Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов.
Известен автоколебательный автопилот управляемого снаряда, предназначенный для обработки импульсных сигналов управления [1].
Наиболее близким к предлагаемому является известный автоколебательный рулевой привод управляемого снаряда [3]
Автоколебательный рулевой привод содержит сумматор, первый вход которого является входом привода, последовательно соединенные корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний, релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи с вторым входом сумматора. Корректирующий фильтр выполнен в виде цепочки из последовательно соединенных резистора и конденсатора, которая включена между входом релейного элемента и общей шиной, при этом сумматор выполнен на трех резисторах, два из которых соединены первыми выводами соответственно с первым и вторым входами сумматора, а вторыми выводами соединены с первым выводом третьего резистора, включенного параллельно цепочке из последовательно соединенных резистора и конденсатора корректирующего фильтра, причем сопротивление третьего резистора и резистора корректирующего фильтра равны между собой. Вследствие наличия отрицательной обратной связи и релейного элемента рули работают в автоколебательном режиме.
Автоколебательный рулевой привод предназначен для обработки гармонического входного сигнала uвх= umax•sinωвхt с переменными амплитудой и частотой ωвх= ωвр±ωc,, определяемых соответственно ошибкой рассогласования контура управления снаряда и частотой вращения снаряда по крену (ωвр= 2πfвр) и способной частотой снаряда (ωc= 2π•fc).
Повышение точности работы в известном автоколебательном рулевом приводе [Л. 3] обеспечивается за счет применения в нем корректирующего фильтра интегродифференцирующего типа с передаточной функцией ,
,
где - коэффициент передачи (ослабления фильтра на нулевой частоте (в статике);
- коэффициент передачи (ослабления фильтра на нулевой частоте (в статике);
T1, T2 - постоянные времени фильтра, равные T1 = RфCф, ,
,
для случая прохождения сигнала по цепи обратной связи.
В выражениях для постоянных времени T1T2:
Rф, Cф - величины резистора и конденсатора фильтра;
Roc,RΣ - величины резисторов в цепи обратной связи и суммирующего.
Из анализа постоянных времени T1, T2 фильтра видно, что T2 > T1, т.е. фильтр имеет максимальное ослабление на частотах выше частоты ω = 1/T1 = 1/T1, определяемое соотношением постоянных времени T1/T2. При равенстве RΣ= Rф, что отражено в формуле изобретения, и выборе Roc и Rвх≫ RΣ для обеспечения точности суммирования видно, что максимальное достижимое ослабление фильтра будет составлять около 2-х раз (не более).
Такой же вид имеет передаточная функция фильтра и по выходному сигналу Uвх при замене в выражениях K0, T1, T2 Rос на Rвх.
Логарифмические амплитудно-фазовые частотные характеристики корректирующего фильтра приведены на фиг. 3 сверху, где A(ω) и ϕ(ω) - соответственно амплитудная и фазовая частотные характеристики. Здесь же приведена и асимптотическая (в виде прямых) логарифмическая амплитудная частотная характеристика фильтра (позиция 1) которая имеет максимальный наклон - 20 дб/декаду.
Применение этого фильтра в известном автоколебательном рулевом приводе позволяет уменьшить примерно в 2 раза амплитуду автоколебаний на входе релейного элемента рулевого привода и тем самым повысить примерно в 2 раза коэффициент передачи релейного элемента по полезному сигналу. Увеличение коэффициента передачи релейного элемента приводит соответственно к увеличению коэффициента усиления (добротности) разомкнутого контура привода, а следовательно, к увеличению примерно в 2 раза статической точности удержания нулевого положения автоколебательного рулевого привода и частичному увеличению динамической точности отработки входных гармонических управляющих сигналов uвх= umax•sinωвхt на частотах до частоты ω = 1/T2..
Недостатками известного автоколебательного рулевого привода является следующие.
1. Низкая точность отработки гармонического входного управляющего сигнала uвх= umax•sinωвхt, , связанного с частотой вращения снаряда по крену и собственной частотой снаряда на траектории полета снаряда из-за переменности скорости полета снаряда (диапазон частот от ω
2. Значительная разница частот автоколебаний от ω
3. Влияние фильтра на уменьшение частоты автоколебаний из-за вносимого фильтром фазового отставания на частотах автоколебаний, особенно сильно заметное при работе на минимальных частотах автоколебаний.
4. Ограниченная возможность увеличения точности работы (не более чем в 2 раза) из-за ограниченного разноса постоянных времени фильтра (около 2 раз) при выбранных величинах резисторов.
Отмеченные в пунктах 1, 2, 3 недостатки взаимосвязаны между собой, так как для обеспечения максимальной (в данном случае не выше 2-х кратной) точности, необходимо выбирать постоянные времени фильтра так, чтобы частоты автоколебаний от ω
Целью изобретения является повышение точности работы автоколебательного рулевого привода и повышение частоты автоколебаний.
Это достигается тем, что в предлагаемом автоколебательном рулевом приводе введен корректирующий фильтр интегродифференцирующего типа с амплитудным ослаблением и фазовым опережением на частотах автоколебаний с передаточной функцией ,
,
где
T1, T2, T3, T4 - постоянные времени фильтра, причем T2, T1, T3 > T4, T1/T2 = T3/T4. Принципиальная схема фильтра приведена на фиг. 2, логарифмические амплитудно-фазовые частотные характеристики соответственно A(ω) и ϕ(ω) (фиг. 3) здесь же представлена и асимптотическая логарифмическая амплитудная частотная характеристика (позиция 1). Видно, что максимальный наклон на участке частот, определяемых постоянными времени T1, T2 составляет -20 дБ/декаду, на участке частот, определяемых постоянными времени T3, T4 - +20 дБ/декаду. Фильтр имеет знакопеременную фазовую частотную характеристику, фазовое отставание и фазовое опережение.
На фиг. 1 представлены автоколебательный рулевой привод, состоящий из сумматора C(1), первый вход которого является входом привода, последовательно соединенные корректирующий фильтр КФ(2), релейный элемент РЭ(3), усилитель мощности УМ(4), рулевая машина РМ (5) в составе управляющего электромагнита УЭМ (6), исполнительного двигателя ИД (7), связанного с рулями, и элемента обратной связи ЭОС (8), подключенного к второму входу сумматора. В качестве операционного усилителя при реализации корректирующего фильтра и релейного элемента (фиг. 2) использована микросхема типа 140УД66. Причем сумматор С (1) схемно совмещен с корректирующим фильтром. Постоянные T1, T2 фильтра реализованы на опереционном усилителе , постоянные T3, T4 на RC-цепочке на выходе операционного усилителя перед входом релейного элемента РЭ.
Передаточная функция активной части фильтра (на операционном усилителе) имеет вид по сигналу Uос ,
,
где
k = R3/R2 - статический коэффициент передачи;
T1, T2 - постоянные времени фильтра, равные T1 = R4-C1; T2 = (R3 + R4) CI.
Передаточная функция пассивной части фильтра имеет вид ,
,
где ,
,
T3=R5C2, (при пренебрежении величины конденсатора C3, C3 < C2).
(при пренебрежении величины конденсатора C3, C3 < C2).
Передаточная функция корректирующего фильтра с учетом обеих частей имеет вид
Wкф(p) = W1(p) • W2(p).
Устройство работает следующим образом.
При отсутствии входного сигнала Uвх среднее значение сигнала ошибки Δu = uвх-uoc на выходе сумматора C(1) фиг. 1 отсутствует, в контуре рулевого привода вследствие отрицательной обратной связи U релейного элемента устанавливаются автоколебания, частота и амплитуда которых определяются параметрами линейной части и релейного элемента. На выходе релейного элемента РЭ при этом существуют прямоугольные колебания 50%-ной скважности частоты автоколебаний. Якорь управляющего магнита, поршень рулевой машины и связанные с ним рули колеблются с частотой автоколебаний около нулевого среднего положения. Учитывая, что линейная часть рулевого привода является фильтром низкой частоты, на выходе нулевого привода сигнал частоты автоколебаний имеет форму, близкую к синусоидальной. На выходе корректирующего фильтра КФ амплитуда автоколебаний уменьшается на величину амплитудного ослабления фильтра на частоте автоколебаний (фиг. 3), чем достигается увеличение коэффициента передачи релейного элемента для повышения точности рулевого привода. Поскольку на частотах автоколебаний корректирующий фильтр имеет фазовое опережение, то при этом не происходит снижения частоты автоколебаний, наоборот, частота автоколебаний увеличивается.
При подаче на вход рулевого привода гармонического входного управляющего сигнала uвх= umax•sinωвхt этот сигнал как сигнал ошибки Δu = uвх-uoc , который содержит высокочастотную составляющую частоты автоколебаний (30 - 120 Гц) и низкочастотную гармоническую составляющую частоты входного сигнала (4oC14 Гц), поступает на вход корректирующего фильтра. Каждая из составляющих сигнала ошибки, проходя через корректирующий фильтр, претерпевает амплитудное и фазовое искажение, что видно из фиг. 3. Скважность импульсов на выходе релейного элемента в этом случае будет переменной, изменяющейся по гармоническому закону, пропорционально низкочастотной составляющей сигнала ошибки. Соответственно якорь магнита, поршень рулевой машины и рули будут отрабатывать величину ошибки рассогласования, тем самым обрабатывая заданное гармоническое входное воздействие.
За счет введения в автоколебательный рулевой привод предлагаемого корректирующего фильтра удалось повысить точность отработки входного управляющего сигнала, повысить частоту автоколебаний, снять ограничение по возможности увеличения точности работы за счет введения необходимого для этого ослабления фильтра на частотах автоколебаний, обеспечиваемого соотношением постоянных времени T2/T1 и T4/3.
Эти достоинства позволяли обеспечить в автоколебательном рулевом приводе с гармоническим входным управляющим сигналом перспективных управляемых снарядов требуемые динамические и точностные характеристики в широком диапазоне изменения шарнирных нагрузок (от пружинной до перекомпенсации) и развиваемых моментов исполнительного пневмодвигателя рулевой машины, использующего энергию набегающего потока воздуха в широком диапазоне скоростей полета управляемого снаряда.
Таким образом, предлагаемое техническое решение по сравнению с известным позволяет повысить точность работы автоколебательного рулевого привода как при отработке гармонических входных управляющих сигналов, так и статической точности удержания нулевого положения рулей при отсутствии входного сигнала, и повысить частоту автоколебаний с использованием доступной элементной базы практически без увеличения массы и габаритов аппаратуры в управляемом снаряде.
Источник информации
1. Автоколебательный автопилот управляемого снаряда. Заявка 93000704. Б. И. N 23, ВНИИПИ, Москва, 1995.
2. Положительное решение ВНИИГПЭ от 3 апреля 1996 о выдаче патента на изобретение по заявке 93000704 (н/вх. 1595, 18.04.96).
3. Автоколебательный рулевой привод управляемого снаряда. Заявка 93032538. Б.И. N 24, ВНИИПИ, Москва, 1996.
4. Положительное решение ВНИИГПЭ от 25 января 1996 г о выдаче патента на изобретение по заявке 93032538 (н/вх. 628, 12.02.96).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1996 |
|
RU2115086C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2081446C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2079806C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2117324C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
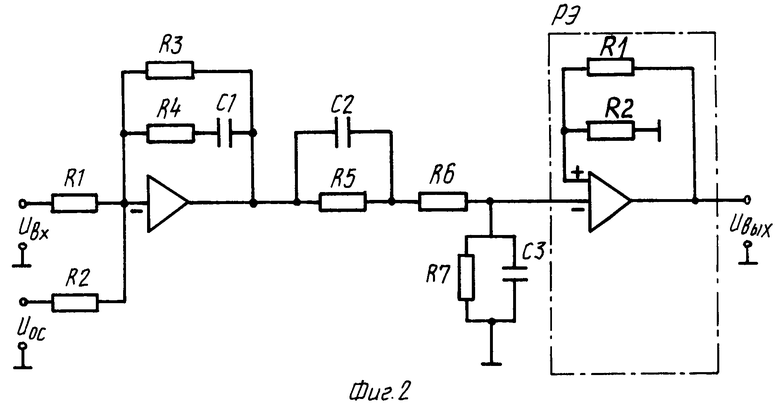

Изобретение относится к оборонной технике, в частности, к управляемым снарядам. Сущность изобретения: в автоколебательный рулевой привод управляемого снаряда, содержащий сумматор, первый вход которого является входом привода, последовательно соединенные релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи с вторым входом сумматора, введен корректирующий фильтр интегродифференцирующего типа с амплитудным ослаблением и фазовым опережением на частотах автоколебаний, выполненный в виде последовательно соединенных операционного усилителя, в прямой цепи которого включены первый и второй резисторы, первые выводы которых соединены соответственно с входом привода и выходом элемента обратной связи, а в цепи отрицательной обратной связи -третий резистор, параллельно которому включена цепочка из последовательно соединенных четвертого резистора и интегрирующего конденсатора, и цепочки из параллельно соединенных пятого резистора и дифференцирующего конденсатора, выход которой через шестой резистор подключен к инвертирующему входу релейного элемента и к цепочке из параллельно включенных седьмого резистора и конденсатора, второй вывод которой подключен к общей шине. Изобретение позволяет повысить точность работы автоколебательного рулевого привода и повысить частоту автоколебаний. 3 ил.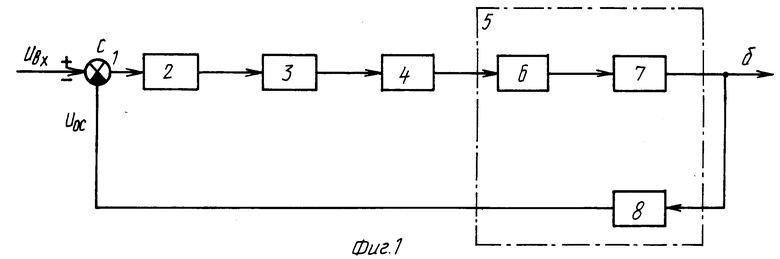
Автоколебательный рулевой привод управляемого снаряда, содержащий сумматор, первый вход которого является входом привода, последовательно соединенные релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи с вторым входом сумматора, отличающийся тем, что в него введен корректирующий фильтр интегродифференцирующего типа с амплитудным ослаблением и фазовым опережением на частотах автоколебаний, выполненный в виде последовательно соединенных операционного усилителя, в прямой цепи которого включены первый и второй резисторы, первые выводы которых соединены соответственно с входом привода и выходом элемента обратной связи, а в цепи отрицательной обратной связи - третий резистор, параллельно которому включена цепочка из последовательно соединенных четвертого резистора и интегрирующего конденсатора, и цепочки из параллельно соединенных пятого резистора и дифференцирующего конденсатора, выход которой через шестой резистор подключен к инвертирующему входу релейного элемента и к цепочке из параллельно включенных седьмого резистора и конденсатора, второй вывод которой подключен к общей шине.
| RU, заявка, 93032538 A, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |

