1
Изобретение относится к автомати- зации производства.
Целью изобретения является снижение производительности устройства пу тем снижения времени срабатывания электромагнитов,
/ На чертеже схематически изображен захватное устройство для перемещения деталей при штамповке, обилий вид.
Захватное устройство для переме- щения деталей при штамповке состоит из П-образного магнитопровода 1, на котором установлена удерживающая катушка 2. Выводы 3, 4 катушки 2 подключены постоянно к источнику посто- янного тока, поэтому удерживающая катушка 2 создает магнитньш поток Ф. К полюсным наконечникам П-образного ма нитопровода 1 приставлена перемещаемая деталь 5. В междуполюсной зоне П-образного магнитопровода 1 расположен другой замкнутый П-образный магнитопровод 6, поперечное сечение которого всегда больше поперечного сечения перемещаемой детали 5. На этом магнитопроводе вне междуполюсной зоны установлена катушка 7, выводы 8, 9 которой подключаются к источнику постоянного тока, например путевым выключателем в момент прихва тьшания перемещаемой детали 5 и отключаются от источника питания при сбросе детали 5 с захватного уст- .ройства. Катушка 7 создает свой магнитный поток Ф в замкнутом магнитопроводе 6. Ампервитки этой катушки выбраны так, что при подаче напряжения на выводы 8, 9 магнитный поток Ф насыщает магнитопровод 6.
Захватное устройство для перемещения деталей при штамповке работает следующим образом.
При необходимости перемещения детали 5 напряжение подается, например путевым вьжлючателем на выводы 8, 9 катушки 7. Созданный катушкой 7 маг нитный поток Ф , нacьш aeт магнитопровод 6. Поскольку необходимо только насытить шунтирующий магнитопровод 6 а не создавать тяговое усилие для удержания детали 5, мощность катуш- ки 7 в несколько раз меньше мощности удерживакицей катушки 2, создающей усилие удержания детали 5. Поэтому индуктивность и постоянная времени катушки 2 в несколько раз больше ин- дуктивности и постоянной времени катушки 7. Переходный процесс при ус- тановлении потока Ф протекает го
.
2208
.
,
Q 15-- „25
, , ® .
30
40
45
312
раздо быстрее, чем в известном уст- ройстве, когда возникает и исчезает магнитный поток Ф многовитковой удерживающей катушки.
В междуполюсной зоне магнитный поток Ф насьш(ающей катушки 7 направлен согласно потоку удерживающей катушки 2. Поэтому магнитопровод 6 является нacьш eнным также и для потока удерживающей катушки 2. Тогда практически весь поток Ф удерживающей катушки 2 замыкается через деталь 5 и создает усилие, притягивающее деталь 5 к полюсным наконечникам 1. Захватное устройство, установленное, например, на руке промьшшенного робота, перемещается на рабочую позицию, например в раскрытое простран- ство между пуансоном и матрицей штампа. В случае необходимости сброса детали 5 на рабочей позиции отключается, например, путевым датчиком насьш ающая катушка 7. Магнитный поток Ф этой катушки исчезает. Магнитопровод 6 становится ненасьшченным. Та- -ким образом, в междуполюсной зоне П-образного магнитопровода 1 оказы- вается ненасьш енный магнитопровод, шунтирующий деталь 5.Поэтому магнитный поток Ф удерживающей катушки 2 переключается в этот магнитопровод 6, так как он расположен ближе детали 5 и его сечение больше сечения детали 5 (уменьшается поток Ф и увеличивается поток Ф). При определенном минимальном значении потока Ф созданное этим потоком усилие настолько уменьшается, что деталь 5 . под действием своего веса отделяется от полюсных наконечников магнитопровода 1 и падает, например, на матрицу штампа.
Суммарный магнитный поток удерживающей катушки 2 при этом не меняется, т.е. сумма потоков Ф + Ф2 const, происходит только перераспределение потока из детали 5 в ненасыщенный магнитопровод 6. Поэтому во время переходного процесса не возникает изменения суммарного магнитного пото- .ка удерживающей катушки 2 и не возникает ЭДС самои1здукции катушки, тормозящая переходной процесс.
После сброса детали 5 захватное устройство, например, рукой промьщ - ленного робота перемещается обратно на исходную позицию и устанавливается в непосредственном приближении к перемещаемой новой детали. Напряже3 12208314
кие питания подается, например, пу-поток Ф через деталь 5, к деталь тевым датчиком на выводы 8, 9 насы-удерживается в притянутом положении щающей катушки 7. Возникает поток. возникшим вследствие этого усилием. Ф, который насьщает замкнутьй маг-Поскольку суммарный магнитный поток нитопровод 6. Так как этот поток на-5 Удерживающей катушки 2 снова не ме- правлен согласно потоку Ф удержи-няется по величине, а только пере- ванщей катушки 2, для потока Ф маг-распределяется из магнитопровода 6 нитопровод 6 также становится на-в деталь 5, переходной процесс снова сьш1енным и он должен вытесниться вне тормозится ЭДС самоиндукции Многоперемещаемую деталь 5. Возникаетвитковой удерживающей катушки 2.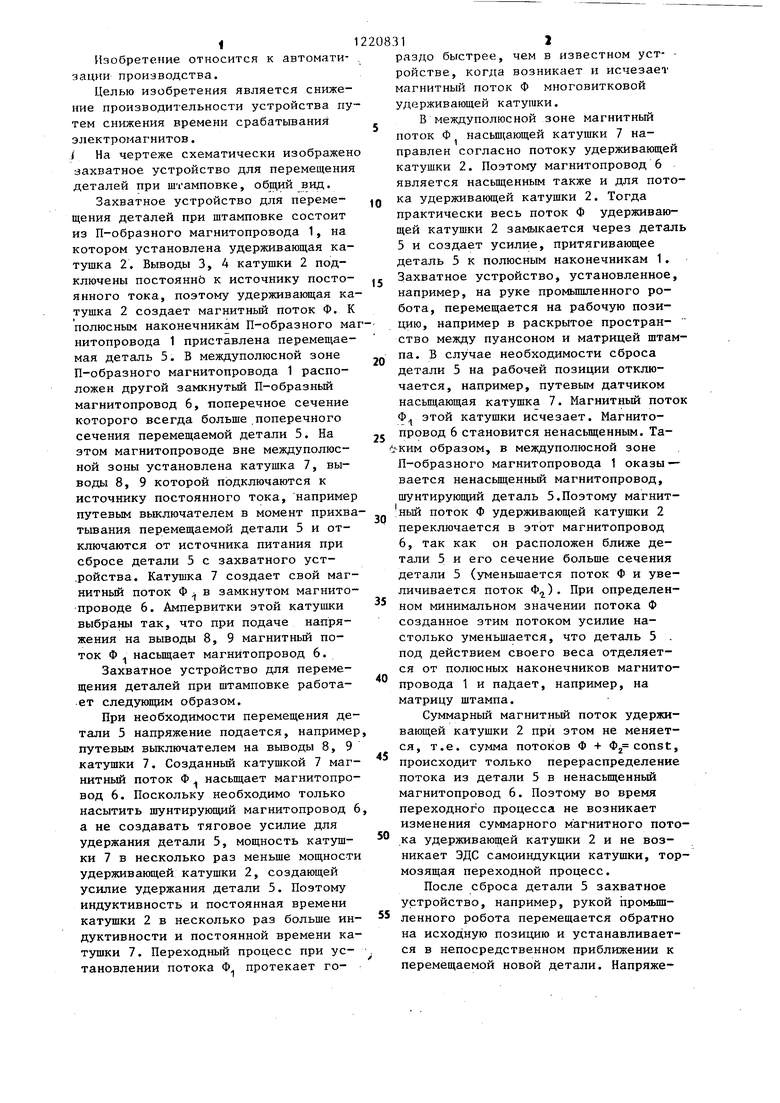
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический вибратор для подачи изделий | 1984 |
|
SU1178664A1 |
| Привод высоковольтного выключателя постоянного тока | 1983 |
|
SU1152051A1 |
| Поляризованное электромагнитное реле | 1986 |
|
SU1372411A1 |
| Электромагнитная муфта тормоза | 1987 |
|
SU1569457A1 |
| Линейный индукторный электродвигатель | 1988 |
|
SU1584043A1 |
| Горелка для сварки магнитоуправляемой дугой | 1982 |
|
SU1044443A1 |
| Устройство для измерения относительной магнитной проницаемости слабоферромагнитных сыпучих материалов | 1983 |
|
SU1126910A1 |
| Линейный электрический двигатель | 1981 |
|
SU1128343A1 |
| Устройство для контроля положения рабочих органов механизмов | 1982 |
|
SU1023374A1 |
| Вибрационное загрузочное устройство | 1984 |
|
SU1175818A1 |

| Юревич Е.И | |||
| и др | |||
| Устройство про- мьшшенных роботов | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
