1
Изобретение относится к баланси- ровОчиой технике и может бытн исполь зовано в высокоточных балансировочных станках.
Целью изобретения является повьше- ние производительности балансировки за счет автоматизации управления кор ректировкой и регистрации значения .дисбаланса.
На чертеже изображена блок-схема устройства.
Автоматическое балансирующее устройство содержит последовательно соединенные датчик 1 опорного сигнала, усилитель-формирователь 2 и формирователь 3 квадратурных составляющих, генератор 4 синусоидальных квадратурных напряжений, два измерительных ка нала 5 и 6, каждый из которых выполнен в виде последовательно соединенных датчика 7(8), гаирокополосного усилителя 9(10) и первого синхронного детектора 11(12), вторые входы детекторов 11 и 12 связаны соответст венно с первым и вторым выходами фор мирователя 3 квадратурных составляющих, синхронного детектора 13(14), первые входы детекторов 13 и 14 связаны соответственно с выходами широкополосных усилителей 9 и 10, вторые входы связаны соответственно с вторым и с первым выходами формирователя 3 квадратурных составляющих, комп лексного электродинамического век- торметра 15(16) с неподвижными обмотками 17 и 19 (18 и 20) и подвижной обмоткой 21(22), неподвижные обмотки 17 и 19 (18 и 20) связывают соответственно выход синхронного детектора 11(14) с вторым выходом генератора 4 синусоидальных квадратурных напряжений и выход синхронного детектора 13(12) с первым выходом генератора 4, последовательно соединенных усилителя 23(24), вход которого связан с подвижной обмоткой 21(22), детектора 25(26), второй вход которого связан с вторым выходом генератора 4 синусоидальных квадратурных напряжений, измерителя 27(28) амплитуды дисбаланса и блока 29(30) управления, и регистратора 31-(32), два исполнительных механизма 33 и 34, связанных соответственно с блоками 29 и 30 управления измерительных каналов 5 и 6, и два блока 35 и 36 синхронизации, первые входы которых связаны между собой и с выходом усилителя-формирователя 2,
to
5
20
215212
вторые входы между собой и с вторым выходом генератора 4 синусоидальных квадратурных напряжений, третьи входы связаны соответственно с подвижными катушками 21 и 22, а выходы соответственно с вторыми входами блоков 29 и 30 управления.
Устройство работает следующим образом.
При вращении балансируемого ротора 37 датчики 7 и 8 дисбаланса, установленные на опорах, вырабатывают сигналы, амплитуда и фазовый сдвиг которых зависит от амплитуды и фазы дисбаланса в соответствующей плоскости коррекции, и подают их на широкополосные усилители 9 и 10.
Сигнал с датчику 1 опорного сигнала поступает на усилитель-формирователь 2 и подается на формирователь квадратурных составляющих 3 и первые входы блоков синхронизации 35 и 36.
На синхронные детекторы 11 - 14 измерительных каналов 5 и 6 поступают сигналы с широкополосных усилителей 9 и 10 и управляющие сигналы в виде меандров с формирователя 3 квадратурных составляющих. Синхронные детекторы 11 - 14 выделяют напряжения, пропорциональные проекциям вектора дисбаланса на оси координат в каждой плоскости коррекции и подают их на неподвижные обмотки 17-20 комплексных злектродинамических век- торметров 15 и 16.
В результате взаимодействия магнитных полей неподвижных обмоток 17 - 20 Р1 подвижных обмоток 21 и 22 последние отклоняются пропорционально амплитуде и фазе дисбаланса в каждой плоскости коррекции. Индикация результатов осуществляется в полярной системе координат для каждой плоскости коррекции векторметрами 15 и 16.
25
35
45
30
40
Одновременно с генератора синусоидальных квадратурных напряжений 4 на неподвижные обмотки 17 - 20 век- торметров 15 и 16 подаются переменные напряжения, изменяющиеся по синусоидальному закону. Поскольку неподвижные обмотки 17 и 19 (18 и 20) сдвинуты в пространстве между собой на 90, то образующийся результирующий магнитный поток представляет собой вращающееся с частотой работы генератора синусоидальных квадратур- .ных напряжений 4 магнитное поле, которое наводит ЭДС в подвижных обмотках 21 и 22. Амплитуда и фаза ЭДС характеризуют амплитуду и фазу дисбаланса ротора 37. Эта ЭДС усиливается в усилителе 23(24) и по управляющему сигналу с генератора 4 синусоидальных квадратурных напряжений выпрямляется детектором 25(26), после чего в измерителях 27(28) амплитуды дисбаланса определяется действующее значение амплитуды, которое фиксируется в регистраторе 31(32).
Сигнал с измерителя 27(28) амплитуды дисбаланса вместе с сигналом с блока синхронизации 35(36) поступает на входы блока 29(30) управления исполнительным механизмом 33(34), в котором вырабатывается команда на начало работы и мощность воздействия исполнительного механизма 33 (.34)
Автоматическое балансирующее устройство позволяет определять амплитуду и фазу дисбаланса в широком диапазоне частот вращения и автоматизировать процесс устранения неисправности, что приводит к снижению трудоемкости и повышению производительности балансировки.
Формула изобретения
Автоматическое балансирующее устройство, содержащее последовательно
соединенные датчик опорного сигнала, усилитель-формирователь и формирователь квадратурных составляющих, генератор синусоидальных квадратурных напряжений, первый и второй измерительные каналы, первьп и второй блоки синхронизации, первые входы которых связаны между собой и с выходом усилителя-формирователя, вторые между собой и с выходом генератора синусоидальных квадратурных напряжений, третий вход первого блока синхронизации - с выходом первого измерительного канала, а третий вход
второго блока синхронизации - с выходом второго измерительного канала, и первый и второй исполнительные механизмы, отличающееся тем, что, с целью повышения производительности, оно снабжено двумя цепями, каждая из которых включает последовательно соединенные усилитель, вход которого связан с выходом соответствующего измерительного канала,
детектор, второй вход которого связан с вторым входом соответствующего блока синхронизации, измеритель амплитуды дисбаланса и блок управления, второй вход которого связан с выходом соответствующего блока синхронизации, а выход - с соответствующим исполнительным механизмом, и регистратор, вход которого связан с выходом измерителя амплитуды дисбаланса.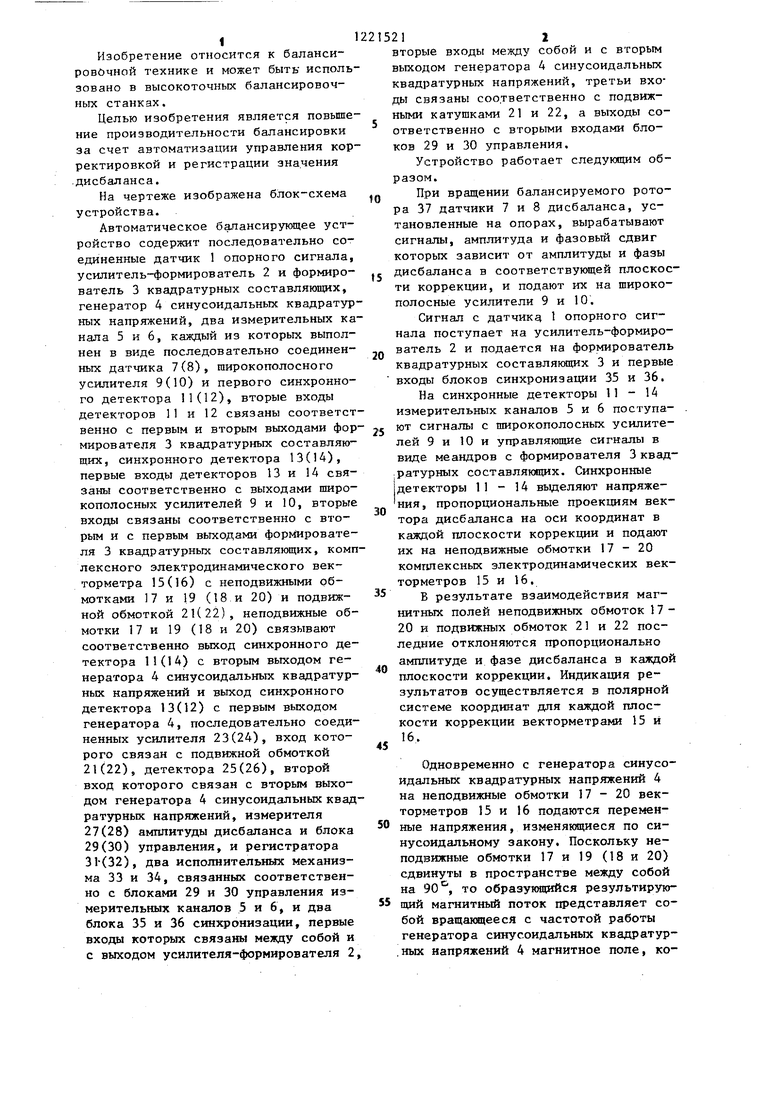

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое балансирующее устройство | 1985 |
|
SU1293505A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1981 |
|
SU974173A1 |
| Измерительное устройство к баланси-РОВОчНОМу СТАНКу | 1979 |
|
SU853446A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1043498A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU879342A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1978 |
|
SU746226A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1978 |
|
SU747272A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420419A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU896438A1 |
Изобретение относится к балансировочной технике и позволяет повысить производительность и снизить трудоемкость балансировки за счет автоматизации управления коррекции и регистрации дисбаланса. Измерение параметров дисбаланса проводится в измерительных каналах, характеризующий амплитуду дисбаланса сигнал с выхода измерительного канала подается на первый вход блока управления, на второй вход которого поступает характеризующий фазу дисбаланса сигнал с выхода блока синхронизации; блок управления формирует команды, поступающие на вход исполнительного механизма, осуществляющего коррекцию дисбаланса в двух плоскостях коррекции. 1 ил. о (О сл tsD IND Ol to
