(54) ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ Изобретение относится к измерительной технике и может быть исполь зовано в различных балансировочных станках. Известно измерительное устройств к балансировочному станку, содержащее датчики дисбаланса, связанный с ними рещающий , подключенные к его выходу усилитель, измеритель величины и угла дисбаланса, два син хронных детектора, входы которых связаны с выходами усилителя, а выходы с входом измерителя величины и угла дисбаланса, два сдвинутых на 90° один относительно другого датчика опорного сигнала и связанные с нимиформирователи опорных сигналов, выходы которых соединены с управлякмдими входами синхронных детекторов 1 . Недостатком устройства является низкая точность измерения величины и угла дисбаланса, обусловленная прямоугольной формой квадратурных опорных сигналов, подаваемых на управляющие входы синхронных детектор Наиболее близким техническим решением к данному изобретению яв- ляется измерительное устройство к балансировочному станку, содержащее датчики дисбаланса, связанный с ними рещающий блок, два усилителя, подключенные к его выходам, измеритель величины и угла дисбананса, блок синхронных детекторов, входы которого связаны с выходами усилителей, а выход - с входом измеоителя а также датчик опорного сигнала и формирователь опорных сигналов С2 . Однако известное устройство не обеспечивает требуемой точности измерения при изменении скорости вращения балансируемого ротора из-за искажения формы квадратурных опорных сигна1лов. Целью изобретения является повы:Шение точности балансировки. Поставленная цель достигается тем, что в известном устройстве формирователь опорных сигналов выполнен в виде последовательно соединенных схемы управления, схемы сравнения и схемы формирования квадратурных составляющих, а также, связанных последоват ельно делителя частоты, счетчика и схемы запоминания, опорного генератора, выЯод которого связан с входом схемы управления, и второго счетчика, соединенного входом с вторым выходом схемы управления, а выходом - с вторым входом схемы, сравнения, третий вход которой соединен с выходом схемы запоминания второй вход схемы управления - с выходом датчика опорного сигнала, третьи вход и выход соответственно с выходом и вторым входом схемы формирования квадратурных составляющиз, четвертый выход - с входом делителя частоты, пятый выход - с вторым входом схемы запоминания, а второй и третий вьоходы схемы формирования квадратурных составляющих соединены с управляю14ими входами блока синхронных детекторов.
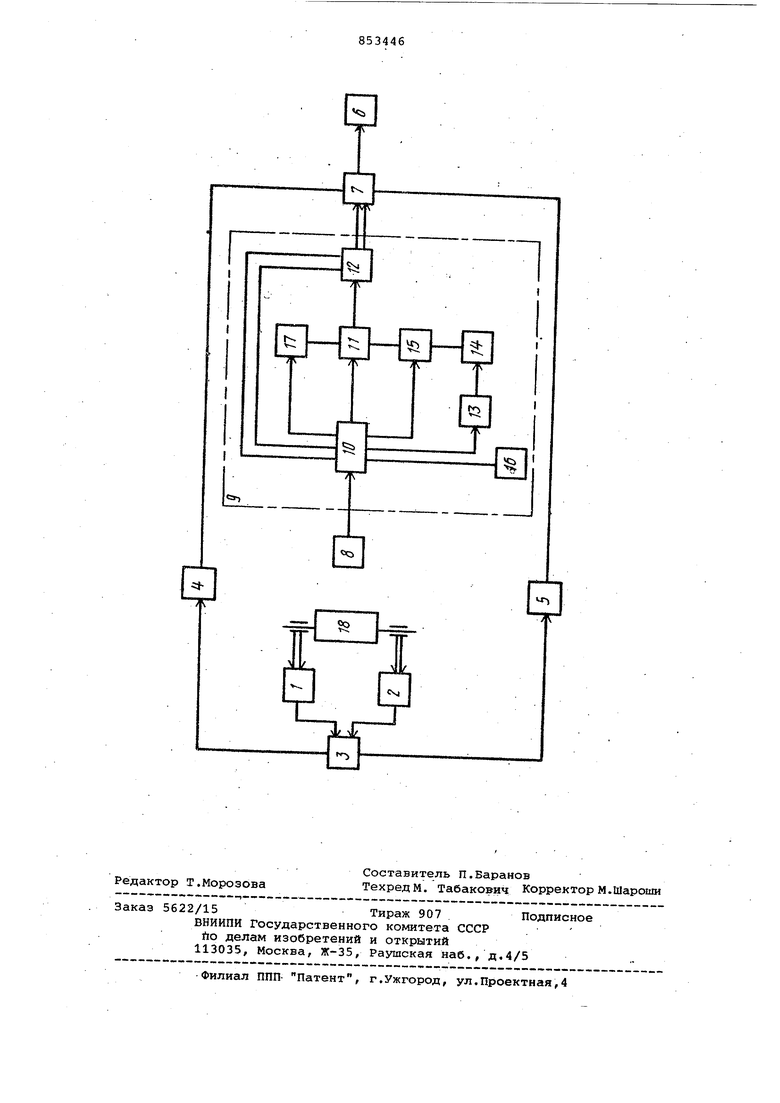
На чертеже изображена блок-схема предлагаемого измерительного устройства.
Устройство содержит датчики 1 и 2 дисбаланса, связанный с ними решающий блок 3, усилители 4 и 5, подключенные к его выходам, измеритель 6 величины и угла дисбаланса.; блок 7 синхронных детекторов, входы котороfo связаны с выходами усилителей 4 и 5, а выход - с входом измерителя 6, а также датчик 8 опорного сигнала и формирователь 9 опорных сигналов, выполненный в .виде последователно соединенных схемы 10 управления, схемы И сравнения и схемы 12 формирования квадратурных составляющих/ а также связанных последовательно делителя 13 частоты, счетчика 14 и схе.мы 15 запоминания, опорного генератора 16, выход которого связан с входом схемы 10 управления, и второго счетчика 17, соединенного входом с вторым выходом схемы 10 управления, а выходом - с вторым входом схемы 11 сравнения, третий вход которой соединен с выходом схемы 15 запоминания,, второй вход схемы 10 управления - с выходом датчика 8 опорного сигнала, третьи вхо и выход соответственно - с выходом и вторым входом схемы 12 формирования квадратурных составляющих, четвертый выход - с входом делителя 13 частоты, пятый выход - с вторым входом схемы 15 запоминания, а второй и третий выходы схемы 12 формирования квадратурных составляющих соединены с управляющими входами блока 7 синхронных детекторов.
Устройство работает следующим образом.
Механические колебания оси ротор 18 преобразуются в электрическую величину посредством датчиков 1 и 2 дисбаланса. Сигналы датчиков 1 и 2 дисбаланса, пропорциональные скорости перемещения концов оси ротора 18, поступают на рещающий блок 3, где производится разделение плоскостей коррекции. Затем сигналы подаются на широкополосные усилители 4 и 5, где усиливаются по амплитуде., и без искажения формы поступают на блок 7 синхронных детекторов.
Для получения периодических опорных напряжений с частотой, соответствующей частоте вращения ротора, используется датчик 8 опорного сигнала и формирователь 9 опорных сиг надов.
Принцип формирования опорного сиг нала основан на выработке в каждом приоде вращения ротора 18 трех дополнительных импульсов, делящих период на 4 равные части.
Опорный генератор 16 непрерывно врабатывает импульсы заполнения с постоянной частотой.
Датчик 8 опорного сигнала вырабатывает за каждый оборот ротора 18 импульс, характеризующий положение метки на роторе 18.
При поступлении импульса с датчика 8 опорного сигнала на схему 10 управления, последняя вырабатывает последовательность импульсов, которы выполняют следующие функции.
Первый импульс, по времени совпадающий с импульсом датчика 8 опорного сигнала, устанавливает схему
12формирования квадратурных составляющих в исходное состояние, одновременно прекращая поступление импульсов на второй счетчик 17, делитель
13частоты исхему 11 сравнения. Второй импульс сбрасывает инфор,мацию в схеме 15 запоминания и во втором счетчике 17.
Третий импульс производит перезапись информации предьздущего оборота ротора из счетчика 14 в схему 15 запоминания.
Четвертый импульс сбрасывает информацию в счетчике 14.
Одновременно на делитель 13, проиводящий деление частоты на четыре, счетчик 17 и схему 11 сравнения начинают поступать импульсы с частотой работы опорного генератора 16. Импульсы, поступающие на схему 11 сравнения, имеют время задержки относительно импульсов, поступающих на второй счетчик 17. Этим учитывается время переходных процессов во втором счетчике 17 после прихода очередного импульс а счет а.
Как только состояния второго счетчика 17 и схемы 15 запоминания одинаковы, схема 11 сравнения вырабатывает первый импульс сравнения, который отстает от импульса с датчика 8 опорного сигнала на 1/4 периода врщения ротора 18. По этому сигналу схемой 10 управления вырабатывается импульс, которым сбрасывается информация во втором счетчике 17, и он начинает новый подсчет импульсов.
Когда состояния второго счетчика 17 и схемы 15 запоминания одинаковы схема 11 сравнения вырабатывает второй импульс сравнения, отличающийся от первого на 1/4 периода вращения ротора 18. С помощью второго импульса срав нения схема 10 управления вырабаты вает импульс, который сбрасывает информацию во втором счетчике 17, и он начинает новый подсчет импуль сов. Когда в третий раз совпадут состояния счетчика 17 и схемы 15 запоминания, схема 11 сравнения вы рабатывает третий импульс сравнени отстающий от второго на 1/4 период вращения ротора 18. С помощью трет го импульса сравнения схема 10 управления прекратит поступление импульсов на счетчик 17 и схему 11 сравнения. Схема 12 формирования квадратурных составляющих формирует меандры со сдвигом, равным четверти периода вращения ротора, с помощью импульсов с датчика 8 опорного сигнала и импульсов сравнения. При поступлении очередного импульса с датчика 8 опорного сигнала на схему 10 управления все повторяется сначала. Сформированные сигналы схемы 12 формирования квадратурных составляющих поступают на вторые входы блока 7 синхронных детекторов. С выхода блока 7 синхронных детекторов составляющие сигналов днобаланса подаются на измеритель б, где фиксируется величина и угол дис баланса. Применение нового технического решения формирователя опорных сигн лов позволяет увеличить точность .измерения величины и угла дисбалан са вследствие повышения стабильност квадратурных составляющих опорного сигнала. Формула изобретения Измерительное устройство к балансировочному станку, содержащее датчики дисбаланса, связанный с ними рещающий блок, два усилителя. подключенные к его выходам, измеритель величины и угла дисбаланса, блок синхронных детекторов, входы которого связаны с выходами усилителей, а выход - с входом измерителя, а также датчик опорного сигнала и формирователь опорных сигналов, отличающееся тем, что, с целью повышения точности балансировки, формирователь опорных сигналов выполнен в виде последовательно соединенных схемы управления, схемы сравнения и схемы формирования квадратурных составляющих, а также связанных последовательно делителя частоты, счетчика и схемы запоминания, опорного генератора, выход которого подключен к входу схемы управления, и второго счетчика, соединенного входом с ВТОРЫМ выходом схемы управления, а выходом - с вторым входом схемл сравнения, третий вход которой соединен с выходом схемл запоминания,второй вход схемы управления - с выходом датчика опорного сигнала, третьи вход и выход соответственно - с выходом и вторым входом схемы формирования квсщратурных составляющих, четвертый выход с входом делителя частоты, пятый выход - с вторым входом схемы запоминания, а второй и третий выходы схемы формирования квадратурных составляющих соединены с управляющими входами блока синхронных детекторов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР. № 222710, кл. G 01 М 1/22, 1966. 2.Genauigkeits - Auswuchtmaschinen der Baureihe HW-B in Wegmessender Ausfiihrung Bauart ReutlingerZosenhausen. Проспект фирмы Reutlinger, Дармштадт, 1973, с. 13 (прототиг).
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1043498A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1981 |
|
SU974173A1 |
| Автоматическое балансирующее устройство | 1985 |
|
SU1293505A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU879342A1 |
| Автоматическое балансирующее устройство | 1984 |
|
SU1221521A1 |
| Способ определения параметров вектора дисбаланса роторов и устройство для его осуществления | 1986 |
|
SU1392414A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420419A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство балансировочного станка | 1977 |
|
SU748156A1 |