ИзеЗре @ни@ о ноеитея к баланеиревочней технике и мож@ иеполь зеваке 8 аыеоко вчиых балаиеирово них в знкак.
Извзетнб изм@рит@льио@ Д92|гкканальивз уетройзтво к баланоировочнему бланку, еодержащ@@ по€л@дова1@льно ео@динвнны@ датчик опорного зигнала и формирователь квадратуриьт ооотавлпющш, из очник пое ояиного ойа, даа канала изм@р@ни г каждый из ко торых выполнен в ,вид@ последовательно зоеднн нных датчика диебаланеа, широкополоеиого уеилителя, даух еинхронных д@ @кторов; первые входы которых ввязаны е выходом уеилн вля, а вторые - 3 еоотв@твтвующим выходом формирователя ортогональное еоетавляющик, и комплзкеного злектродинамичвзкого в@кторм@тра е йвподвижньми и подвижной обмотками, неподвижные обмотки которого звяэаны з выходами виихронных детекторов, а подвижная е источником йоетоянного тока I,
Недоотзтками уетройзтза являмтей завиеимоать намерений параметров дисбаланса от частоту вращения ротера и необходимость нанеобни метки от шебалаие иа ротор е пооледуюмей его коррекцией в етатике
iTo ёнижает точность залаиокровки , Наиболее близким к июбретению по технической зущноети является иэмз ри €льно@ двухкаиально@ устройство к баланеировочиому втанку, содержащее позледовательно еоединенныб датчик опорного зигнала, усилитель-формирователь и формирователь квадратурных аоетавляющих генератор зинуооидаль
10 ных квадратурных напряжений, да блока синхронизации, два исполнитвльньж механизма,два канала измерения, каждый из которых вш1олиеи в виде последовательно соещнеимых датчика
15 дисбаланса и широкополосного усилителя г двух синхронных детекторов, первые Bxojw которых связаны с «beto дом широкополосного усилителя, а BTOpie о соответствукшщм вшсодом
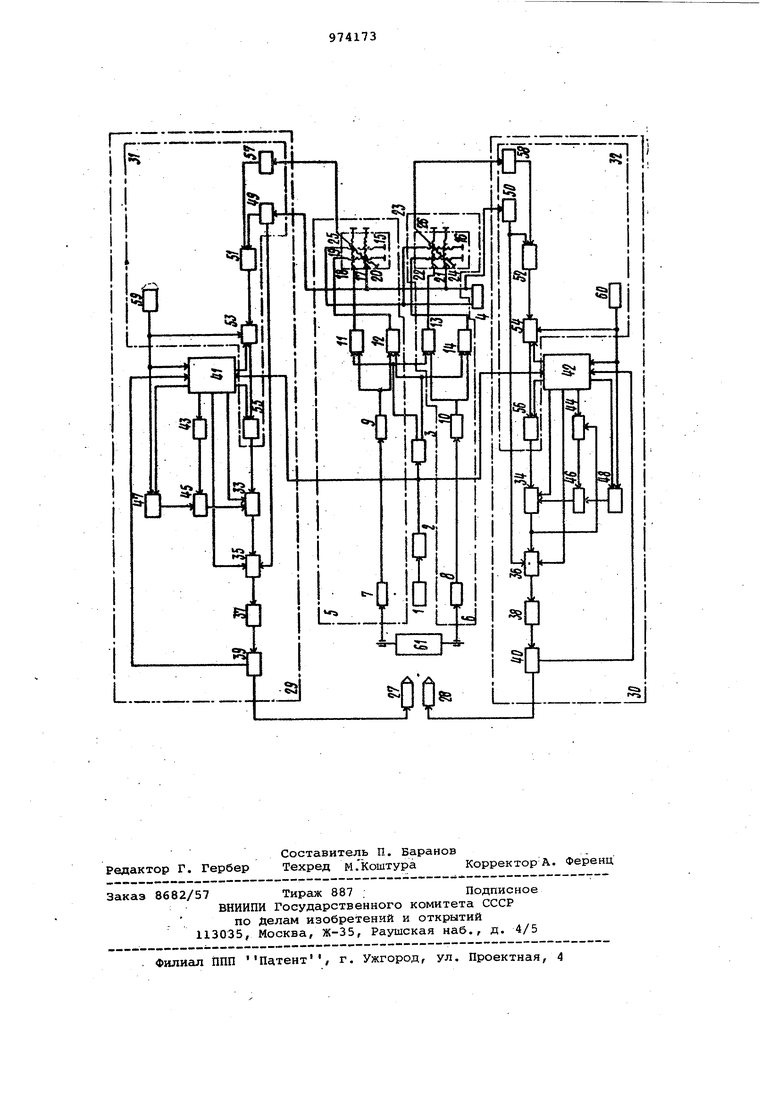
20 формирователя квадратурных составля юащх, и комплексного лектродииамического векторметра, неподвижные обмотки которого подключены к выходам синхронных детекторов и выходам гене25ратора синусоидальные квадратурных напряжений Подвижная обмотка аекторметра, ыходы генератора синфаэных квадратурных напряжений и уси. лиФеля-фО1Я1Шрователя связаны со ахо 30 jc|aMii соответствукощего блока синхронизации, а выход последнего подклю.чен к исполнительному механизму, корректирующему дисбаланс в плоскости коррекции 2. Недостатком устройства является невысокая точность балансировки, невозможность работы в широком диапазоне частот вращения балансируемых роторов из-за того, что в схеме отсутствует синхронизация частот генератора синусоидальных квадратурных напряжений и частоты вращения ро тора по сигналам формирователя квадратурных составляющих,Это приводит к тому, что устройство функционирует только при работе генератора на частоте вращения ротора, когда на систему воздействуют промышленные и эксплуатационные помехи. При различи частот, фаза сигнала переменного тока с подвижной обмотки векторметра моделирует угол дисбаланса ротора на частоте работы двухфазного генератора, а отсчет этого угла производитс по нулю сигнала формирователя квадратурных составляющих, работающего с частотой вращения ротора. При этом сигналы с блока синхронизации на исполнительный механизм подаются значительно раньше действительно необходимого момента на величину, равную отношению рассматриваемых частот. Целью изобретения является повышение точности балансировки в широк диапазоне частот вращения балансируемых роторов, а также повышение помехозащищенности.Поставленная цель достигается тем что в измерительном двухканальном устройстве к балансировочному станку каждый блок синхронизации выполиен в виде последовательно соединенных цифрового фазометра, схемы сравнения, схемы управления, реверсивного счетчика и формирователя сигнала коррекции, последовательно соединениых схемы формирования команд, схемы формирования импульсов и счетчика импульсов, а также схенаа синхронизации, входы которой связаны со вторыми выходами цифрового фазометра и схемы формирования команд, а выход со вторым входом счетчика импульсов входы схемы формирования командподключены к выходам усилителя-формирователя и формирователя сигнала корЬекции и второму выходу цифрового - фазометра, а третий - шестой выходы связаны, соответственно, с первым.и вторым входами цифроззого фазометраи ВТОРЫМ.И входами схем сравнения и управления, третий йход схемы сравнения соединен с выходом счетчика импульсов, второй вход йхемы формиро вания импульсов подключен к выходу схемы сравнения, второй выход формирователя сигнала коррекции - .к вхо ду соответствующего исполнительного механизма, третий вход схемы управления связан с третьим выходом цифрового фазометра, третий и четвертый входы которого подключены к выходу генератора синусоидальных квадратурных напряжений и подвижной обмотке соответств тощего векторметра. Кроме того, комплексный электродингилический векторметр снабжен дополнительно двумя взаимно перпендикулярньши неподвижными обмотками, связанными с генератором синусоидальных квадратурных напряжений. На чертеже схематически изображено устройство. Устройство содержит последовательно соединенные датчик 1 опорного сигнала, усилитель-формирователь 2 и формирователь 3 квадратурных составляющих, генератор 4 синусоидальных квадратурных напряжений, два канала 5 и б измерения, каждый из которых выполнен в виде последовательно соединенных датчика 7(8) дисбаланса и широкополосного усилителя 9(10), двух синхронных детекторов 11 и 12 (13 и 14), первые входы которых связаны с выходом широкополосного усилителя 9(10), а вторые - с соответствующим выходом формирователя 3 квадратурных составляющих,комплексного электродинамического векторметра 15(16) с неподвижными 17-2.0(21-24) и подвижной 25(26) обмотками, неподвижные обмотки 17-20(21-24) которого подключены к выходам синхроннь4х детекторов 11 и 12(13 и14)и выходам генератора 4 синусоидальных квалдаатурных напряжений, два исполнительных механизма 27(28) и два блока 25(30) синхронизации, каждай из которых выполнен в виде последовательно соединенных цифрового фазометра 31(32), схемы 33(34) сравнения, 35(36) управления, реверсивного счетчика 37(38) и формирователя 39(40) сигнала коррекции, выход которого связан со входом соответствующего исполнительного механизма 27(28), последовательно соединенных схемы 41(42) формирования команд, схемы . .43(44) формирования импульсов и счетчика 45(46) импульсов,, а также схемы 47(48) синхронизации, входы которой связаны со вторыми выходами цифрового фазометра 31 (32)и схемы 41(42) фо15мирования команд,а выход - с вторым входом счетчика 45(46)1 шульсов, входы.схемы 41(42)формирования команд подключены к выходам усилителя-формирователя- 2 и формирователя 39(40)сигнала коррекции и - второму выходу цифрового фазометра 31(32), :а тре- : тий - шестой выходы связаны, соответственно, с первым и вторым аходам1- цифрового фазометра 31(32), вторыми входами схемы 33(34) сравнения и схемы 35(36) управления, третий вход схемы сравнения соединен с выходом счетчика 45(46) импульсов, :вторрй вход схемы 43(44) фо 4ирован импульсов подключен к выходу схема ;33(34) сравнения, третий вход схемы 35(36) управления связан с третьим выходом цифрового фазсметра 31(32) , третий и четвертый входы которого подключены к выходу генератора 4 си нусоидальных квадратурньсс напряжений и подвижной обмотке 25(26) соответствующего векторметра 15(16). Каждый цифровой фазсмлетр выполнен в виде последовательно соединённых формирователя 49(50) импульсов, схемы 51(52) формирования импульсов угла, схемы 53(54) управления заполнением и второго счетчика 55(56) импульсов, а также второго формировате ля 57(58) импульсов и генератора . 59(60) импульсов заполнения; выход которого связан с вторым входом схемы 53(54) управления заполнением, а выход второго формирователя 57(58) импульсов связан с BTOPIAI входсм схе мы 51(52) формирования импульсов угла. Устройство работает следующим образом, При вращении несбалансированного ротора 61 датчики 7 и 8 дисбаланса вырабатывают сигналы, г мплитуда и фазовый сдвиг которых зависит от величины и угла дисбаланса в соответствующей плоскости коррекции, и подают их на усилители 9 и 10. . Сигналы с датчика 1 опорного сиг:нала поступают на усилитель-фО етров тель 2 и с частотой вращения ротора 61 подаются на фО дарователь 3 квг1Дратурных составляющих и схемы 41(42) фо1Я4ирования команд управления. На синхронные де-г&ктоуял 11,12 (13 и 14) каждого канала 5 и 6 измерения поступают сигналы с усилителя 9(10) и управляющие сигналы в виде меандров с формирователя 3 квгщ ратурных составляющих. Синхронные детекторы 11, 12(13 и 14) выделяют напряжения, пропорциональные проекциям вектора дисбаланса на оси координат в каждой плоскости коррекции, и подают их на неподвижные обмотки 17 и 18(21 и 22) векторметра 15(16). В результате взаимодействия магнитных полей неподвижных 17 и 18 (21 и 22) и подвижной 25(26) обмоток последняя поворачивается на угол. пропорциональный углу дисбаланса. По величине отклонения подвижных обмоток векторметра 15(16) осуществляется отсчет результатов измерения в Столярной системе координат S данной плоскости коррекции. Одновременно по сигналу уснлителя формирователя 2 схема 41 (42) фор.мирования ксжанд управления выраба тывает управляющий импульс длительностью в один период вращения ротора 61, с помощью которого схема 35(36) управления реверсивным счетчиком 37(38) разрешает ему в режиме сложения импульсов производить подсчет поступающих через формирователь 49(50) импульсов цифрового фазометра 31(32) с синусоидального выхода ге нератора-4 синусоидальных квадратурных напряжений. По истечении одного оборота ротора 61 управляющий иыдульс прекращается и счет импульсов реверсивным счетчиком 37(38) заканчивается . . . Таким образом, моделируется операция деления частотыработы генератора 4 синусоидальных квадратурных напряжений на частоту вращения ротора 61« : В первый оборот ротора 61 с генератора 4 синусоидальных квадратурньах напряжений на неподвижные обмотки 19 к 20(23 и 24) векторметра 15(16) подаются переь енные напряжения/ изменяющиеся по синусоидсшьному и косинусоидальному законам. Поскольку неподвижные обмотки 17-20(21-24) векторметра 15(16) сдвинуты в пространстве ;на 90, то образующийся результирующийся магнитный поток представляет собой вращающееся с частотой работы генератора4 синусоидальных квадратурных напряжений магнитное поле, которое наводит ЭДС в подвижной обмотке 25(26). лмплитуда и фаза ЭДС характеризует величину и угол дисбаланса ротора 61. Напряжение с подвижной обмотки 25(26) подается на формирователь 57(58) импульсов цифрового фазометра 31(32), который вырабатывает на выходе меандры в фазе угла дисбаланса и с частотой подаваемого напряжения. Вместе с тем, синусокдашьный сигнаш, поступающий на неподвижную обмотку 20(24) от генератора 4 синусоидальных квадратурных напряжений, подается на формиров%1тель 49(50) импульсов, в котором также фОЕ о1руются меандры. Оба меандра поступают на схему 51(52) формирования импульсов угла, причал разность во времени их поступления равна углу дисбаланса на частоте работы генератора 4. Схема 51(52) формирования импульсов угла вырабатывает импульс длительностью в эту разность, кото1% 1й открывает схему 53 (54) управления заполнением и разрешает прохождение сигналов с генератора 59(60) импульсов заполнений во второй счетчик 55(56) импульсов f прекращающий работу по сигналу со схемы 41(42) формирования команд при окончаний импульса со схе rttdll(S2) формироавнии имп л&оов т Seaynbtft (зчетчика S5(S6) импул еоа уде «ропорциомалеи углу дио Залаиеа е о неш@мия чё, генератора 4 и S9(60),
При следующем обороте potops €1 управляющий импульс ек@мой 41(42) формирвваний: команд по выходу не выраёатываетоя и вх@мв 33(36 управления 8ыщзв команду на yevaiioa р@1ершамого 37(38) is {(зжим . В ЗФО период ар@м@ии ек@ма 41(42) формирования команд ехему 47 (4@) винхрвнизщми раар@шё1@% прокождёниё вигыа/ О)ц о анзра бра 59(60) импулАвоа запол цифрового фззем@ рз 31(3.1) g ечефуик 45(46) нмнульеоа Kotepaft сэоу(дэо аляв1 ачвФ импульоов йевфу рйющих а гшнераторй §i(eO) импульсов занолизния, Схёма 33(34) еравнёиия Связанная е обоими очш чиками SS(Se) и 4S(46), выдаш е вигнал в момевз- ра квлич@в @а импульоов i оёвих очйфчикак S5 и 45(56 и 4S). До эгому вигнаяу ехему 41(44) фермиро& ы Я импульеов праи§а©диуея ©вну показаний 41(46) им пуЛьеов, Побйе ебнулеиия 45(46) импульеав начинает иевнй уикл Кроме т©го,.еигйал ео ехемы .33(34) ерава еммя через нодготовлеН ну10 к ipftgoie 3i(3i) управления посАуя л и рёжйме йычйУйний на ре.«ереиввшй 37(38)
Слйдонатйльне еФрия импульоов/ а&Фикеирунйниай оч§ чик©м Si(S6) импул&ео 8 цнфр©аего фазометра 31(32), моделйруе угол дивбаланеа на рабочей ранератора 50(60) импульзог заполнения, 3 поел@доаа$ёль nioGTij еижналоа ое екемы 33(14) ©рав карактериэует аеамае йо е реЯйрбнвийм ечв щ иком 37 (3S) пер&аед угла а егочвза, евйааинуй о ротеором 61 # на его екорое ь шращёИйя, ПРИ раа@нв в@ пока 1аний реверсивного 37(38) фермирб а ел1 ЗЭ(40) вйгнала коррак Sinn stafiue команду на иагшлни1 вль йый м@}{ани@м 27(28) и 41(42) формирования команд, нриводящую yeiрой(в7а& 8 п@равиачалвнвв зоетоянив
раёожы yetpoftessa. и ее (единичный или ав ома ич@вкий) об0опв1и ае вя ем@мдй 41(42) формиро вЬния кеыанд,
,fo4Noa«& екенш зайиеи СООТНОШЕНИЯ частоте @н@ра ороа 4 и 5§(&0) и вращения ро«ора 61 и BMiSMp fefOM и эаниоимвефи ©t тйкнй чФа( АрёбоайНйй
благодаряtftKOMy решению осущеот яйег 2й аятоматйЧёекая синхрониаз иий частоты Вращения балансируемого ротора о частотой работы reHepatopa Синусоидальных квадратурных напря жеимй, синхронизация начала отвчш5а угла дисбаланеа п© ме-гке на роторе и автомагичеекая аырабетка еирнала упранлвния на иапвлиит@льный маханием и широком диапаэена скорое«ей йрацшний, что обавпечишавт хброшуш пом@коаащищ@нноать ех@м в целом, 1выеокую точное ь €ъ©ма ма шрййла за очет иепол&аевания филь«рующик еаейвм иамерительной ехемы баланеировочнеро етанка и шыеоной разрешающей епоеобное и электро дииамйчееких аёкторматроа и блока оинмрониаации.
Формула иаобратения
Измерительное двухканальное уе еойо а© к баланеиройочному еФанку, еодержащёе последовательно ео@динёН ныв датчик опорного еигнала, уеилн тЁЛЬ-формирователь и формировазаль ивадраэ урных еоетааляющ х, генератор ойнувоидал&нш{ каадраоурньт напряжений, дша блока ейнхрони1ации| деа иополни @ЛЁНых механизма; Д8а канала и шм@рбниЯг каждый из которых Ё1 1палн@ @ виде последовательно еоединенных (Датчика диебаланза и широкополосного уеилигеля двум еинхронных детекторов, n@psy@ ёкоды которых егязаны о йьаходен шйрокополоеного уеили елн, а steppe о соотвётефаующим ВУ;ЙОДОМ формироваэгйля каадрафурных еоотав лИ19щих, и кемплёкеногб алёк редина ми 1@екг го з@ктврм@ ра, неподвижные обмотки которого подключены к выходам винкронных дегекторов и выходам ieHgpatopa оинуеоидальных квадратурншх напряжений, отличаю щ@ е 0 я т©м, что, е целью поишашния е)чноози баланаировкй в широком диапазоне частот вращения баланеируеммх ротороё, кажднй блок еинхронивации в полней в 8идё йоеледоаафёльн© еоединеннах цифрового фазометра, ехемы сравнения, бх@мы упра9л@ния, рёЗёрвинй & ечетчика и формирователя ла коррекции, пооледовательно еоё дин@ннмх ек@мы формирогания команд, ояемм формйроаания импульеов и ачвтчика импул&зов, а также ом@му рониг ации, зходы Ko iropoA езязаны зо вторыми аынодами цифрового фашометра и ах@мм формирования команд, а sy ход - ео вторым входом ечефчика импульсов, входы акемы формирования команд подключены к амходам узилите лЯ-формироаатёля и формирователя вигнала коррекции и второму выходу дифроаого фазометра, а третий шее дй ёмходы отязанм, еоот1@т@тв@нно, с первьви и stopbiM входами цифрового фазометра и ахам сразвиения и управления, третий вход окемы ераенения соединен е Выходом ечётчика импуль.еов, второй йход схемы формирозеания
импульсов подключен к выходу схемы сравнения, второй выход формирователя сигнала коррекции - к входу соответствумидего исполнительного механизма, третий вход схемы управления связан с третьим выходом цифрового фазометра, третий и четвертый входы которого подключены к выходу генератора синусоидальных квадратурных напряжений и подвижной обмочке соответствующего векторметра.
2. Устройство по п. 1, отличающееся тем, что, с целью повышения помехозащищенности, комплексный электродинамическкй вектор- метр снабжен дополнительно двумя взаимно перпендикулярными неподвижными Ьбмотками, связанными с генератором синусоидгшьиых квадратурных напряжений.
Источни1 и информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №532377, кл. G 01 М 1/22, 1975.
2.Авторское свидетельство СССР 590625, кл. G 01 М 1/22, 1976
(прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое балансирующее устройство | 1985 |
|
SU1293505A1 |
| Автоматическое балансирующее устройство | 1984 |
|
SU1221521A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1978 |
|
SU747272A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1305543A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Измерительное устройство к баланси-РОВОчНОМу СТАНКу | 1979 |
|
SU853446A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1978 |
|
SU746226A1 |
| Измерительное двухканальное устройство к балансировочному станку | 1976 |
|
SU593066A2 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1043498A1 |