Изобретение относится к обработке металлов давлением и может быть использовано в конструкциях шпинделей щэивода прокатных станов, муфт и шарнирных соедине1шй в узлах машины другого назначения, и является усовершенствованием известного шарнира по авт. св. № 1098597,
Цель изобретения - повышение нагрузочной способности шарнира при сохранении его статической определенности.
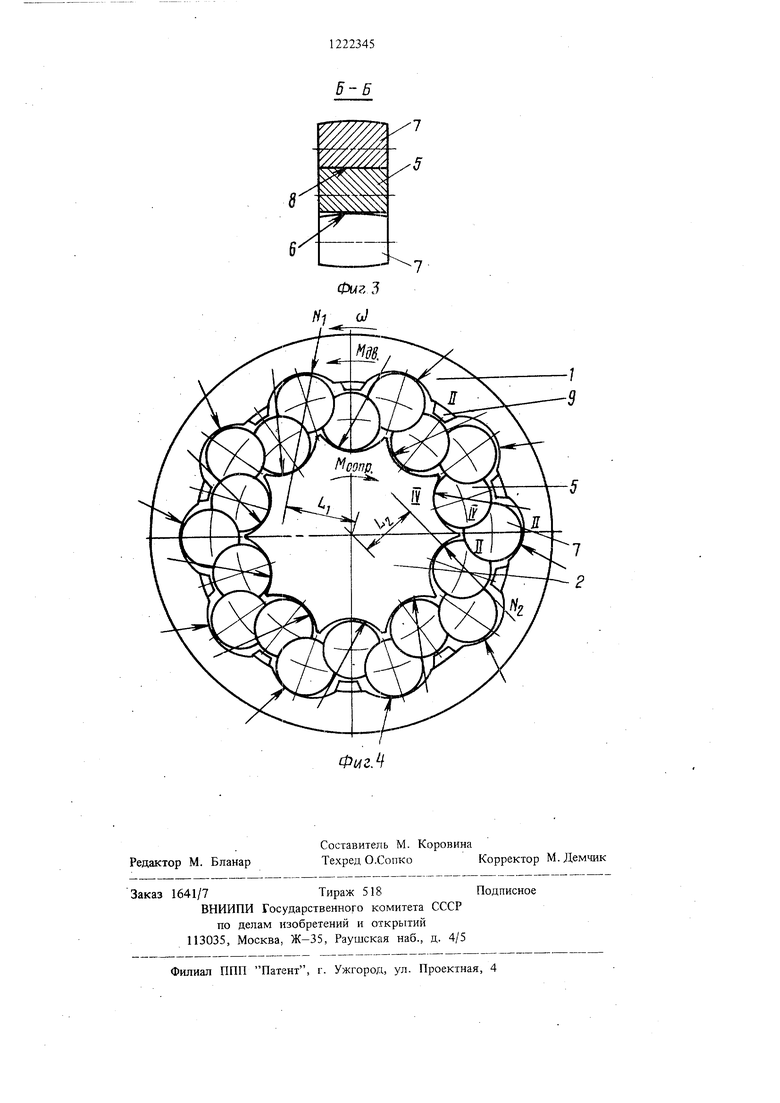
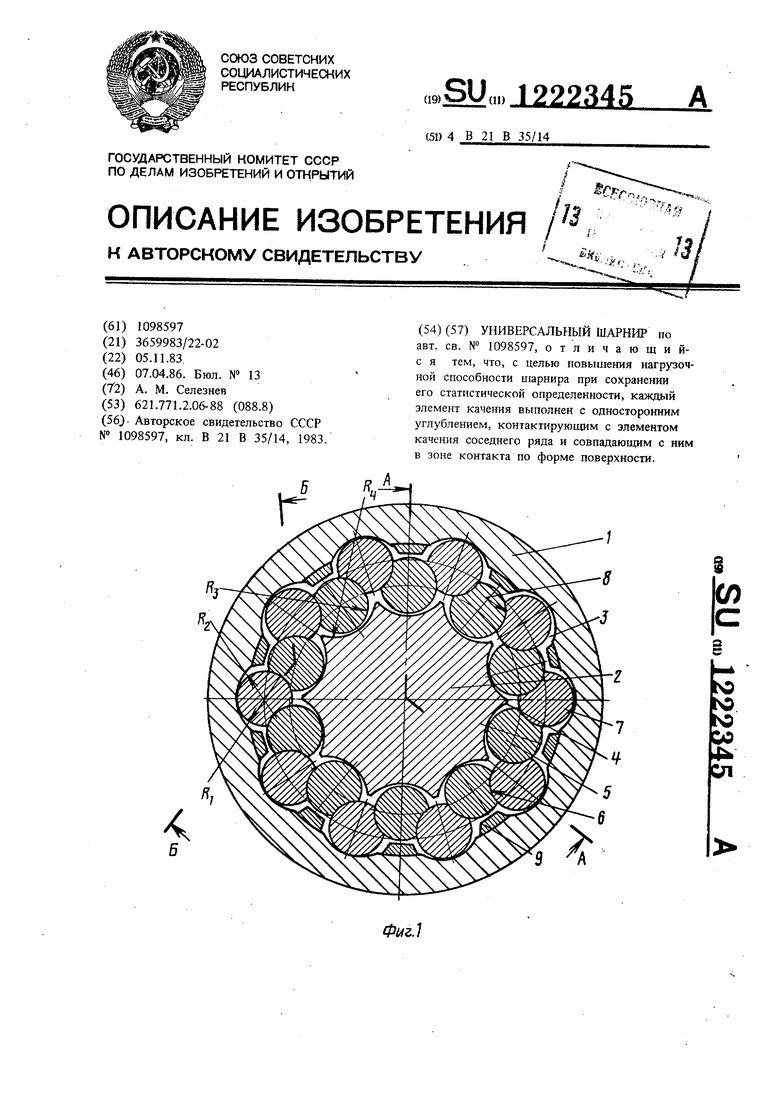
На фиг, 1 изображен универсальный шарнир, поперечный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 на фиг. 4-схематически изображено поперечное сечение шарнира с указанием действующих ts/ioMeHTOB, усилий и классов кинематических пар.
Универсальный шарнир содержит наружную обойму 1 и внутре1шюю головку 2 с гнездами 3 и 4 на поверхностях, обращенных одна к другой. В гнездах размещены два ряда элементов качения, внутренний из которых выполнен в виде дилиндрических роликов 5 с цилиндрическим углублением 6 на поверхностях вращения и уложен в гнездах головки, а наружный выполнен в виде бочкообразных роликов 7 с цилиндрическим углублением 8 на поверхностях вращения и уложен в гнездах обоймы.
На головке может быть закреплена насадка 9 со сферической либо бочкообразной наружной поверхностью, которая имеет окна для прохода роликов 5 и 7 без соприкосновения с насадкой 9. Цилиндрические ролики 5 своими углублениями 6 контактируют с поверхностями вращения бочкообразных роликов 7, которые своими углублениями 8 контактируют с поверхностями вращения щ-шиндрических роликов 5. Гнезда обоймы и головки выполнены цилиндрическими с радиусами, большими радиусов, уложетгых в них элементов качения, т.е. Rj R, и 4 обеспечивает перемещение элементов качения в поперечном сечении mapioipa с одновременным смешением в радиальном и тангенциальном направлениях.
Предлагаемый универсальный шарнир целесообразен для общего случая работы по схеме сдвоенного щарнира, когда обойма (головка установлена в опоре, образующей кинематическую пару V класса, а головка (обойма) установлена в опоре, образующей кинематическую пару III класса.
Кроме цилиндрической формы гнезд 3 и 4 возможна иная, имеющая в поперечном сечении вид других кривых помимо дуг окруж-i ностей, либо вид V-образно расхол.ящихся прямых. Необходимо, чтобы эта форма обеспечи- .вала перемещение элементов качения в попереч
5
0
5
0
5
0
ном сечении с одновременным смещением в радиальном и тангенциальном направлениях, т.е. чтобы имелись соответствующие тангенциальные заэорь. Элементы качения могут быть выполнены в виде роликов другой формы или щариков. Если необходимо компенсировать помимо углового перекоса небольнгие радиальные смещения соединяемых валов, насадка 9 может отсутствовать, а вместо нее на головке 2 дол жно быть установлено ограничительное кольцо 5 для роликов (не показано).
В процессе работы шарнира наружная обойма 1 вращается с некоторой угловой скоростью и передает движущий крутящий момент .B. который преодолевает момент сопротивления М сопр. действующий на внутреннюю головку 2. В результате действия двух указанных моментов в противоположных направлениях, происходит выборка зазоров в шарнире и некоторое угловое смещение обоймы 1 и головки 2 одна относительно другой (фиг. 4),
В процессе выборки зазоров бочкообразные ролики 7 перемещаются в цилиндрических гнездах 3, а цилиндрические ролики 5 - в гнездах 4 с одновременным смещением в радиальном и тангенциальном направлениях. В процессе перемещения цилиндрические ролики 5 проскальзывают своими углублениями 6 относительно поверхностей вращения бочкообразных роликов 7, которые проскальзывают своими углублениями 8 относительно поверхностей вращения цилиндрических роликов 5. При этом каждый ролик в отдельности воздействует на остальные ролики и определяет их положение. В результате этого все ролики 7 поддерживаются в состоянии, когда на них действуют одинаковые усилия N ( J а ролики 5 давят на головку с одинаковыми усилиями Nj.
При этом
а N,
М
сопр
nil ,
где И - количество роликов в ряду; LI и L,, плечи приложения сил относительно
оси вращения.
При компенсации углового перекоса обоймы 1 и головки 2 одна относительно другой, обойма 1 перекатывается относительно бочкообразных роликов 6, тем самым его компенсируя, а насадка 9,, если она имеется в конструкции, дополнительно центрирует обойму 1 и головку 2 одна относительно другой. Шарнир допускает осевое смещение головки 2 относительно обоймы 1 с роликами 7 в м:естах контакта роликов 5 и 7.
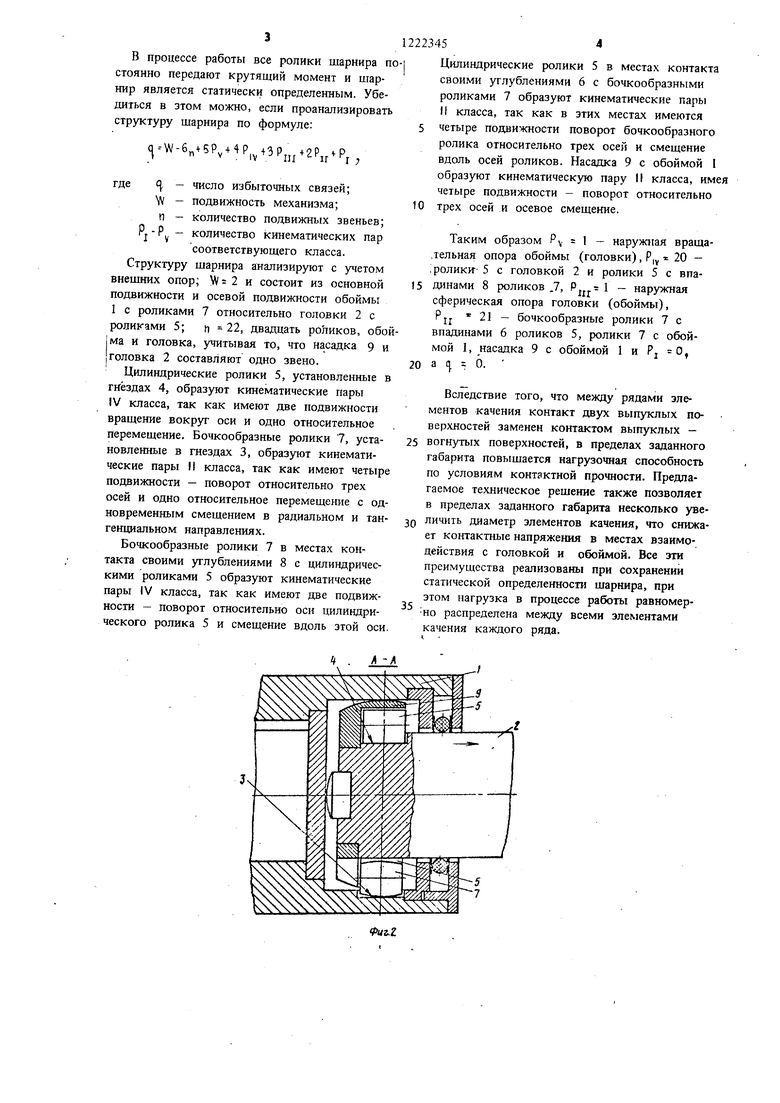
в процессе работы все ролики шарнира постоянно передают крутящий момент и шарнир является статически определенным. Убедиться в этом можно, если проанализировать структуру шарнира по формуле:
(|-W-6.5P,44P,+3Pjjj+2Pjr Pj/
где с - число избыточных связей; V - подвижность механизма; п - количество подвижных звеньев; PJ - Р - количество кинематических пар соответствующего класса.
Структуру шарнира анализируют с учетом внешних опор; г 2 и состоит из основной подвижности и осевой подвижности обоймы 1 с роликами 7 относительно головки 2 с роликами 5; ц 22, двадцать роликов, обойма и головка, учитывая то, что насадка 9 и головка 2 составляют одно звено.
Цилиндрические ролики 5, установленные в гнёздах 4, образуют кинематические пары IV класса, так как имеют две подвижности вращение вокруг оси и одно относительное перемещение. Бочкообразные ролики 7, установленные в гнездах 3, образуют кинематические пары II класса, так как имеют четыре подвижности - поворот относительно трех осей и одно относительное перемещение с одновременным смещением в радиальном и тангенциальном направлениях.
Бочкообразные ролики 7 в местах контакта своими углублениями 8 с цилиндрическими роликами 5 образуют кинематические пары IV класса, так как имеют две подвижности - поворот относительно оси цилиндрического ролика 5 и смещение вдоль этой оси
222345
Цилиндрические рюлики 5 в местах контакта
своими углублениями 6 с бочкообразными роликами 7 образуют кинематические пары If класса, так как в этих местах имеются 5 четыре подвижности поворот бочкообразного ролика относительно трех осей и смещение вдоль осей роликов. Насадка 9 с обоймой I образуют кинематическую пару II класса, имея четыре подвижности - поворот относительно 10 трех осей и осевое смещение.
Таким образом PV 1 - наружная враша- ,тельная опора обоймы (головки), Р|у « 20 - , ролики- 5 с головкой 2 и ролики 5 с впа- 15 динами 8 роликов .7, РЛ, 1 - наружная сферическая опора головки (обоймы), PJJ « 21 - бочкообразные ролики 7 с впадинами 6 роликов 5, ролики 7 с обоймой 1, насадка 9 с обоймой 1 и Pj О, 20 а 1 0.
Вследствие того, что между рядами элементов качения контакт двух выпуклых поверхностей заменен контактом выпуклых 25 вогнутых поверхностей, в пределах заданного габарита повышается нагрузочная способность по условиям контактной прочности. Предлагаемое техническое решение также позволяет в пределах заданного габарита несколько уве3Q личить диаметр элементов качения, что снижает контактные напряжения в местах взаимодействия с головкой и обоймой. Все эти преимущества реализованы при сохранении статической определенности щарнира, при этом нагрузка в процессе работы равномер- но распределена между всеми элементами качения каждого ряда.
1 -Л
Б-6
Фиг.
Редактор М. Бланар
Составитель М. Коровина
Техред О.СопкоКорректор М.Демчик
Заказ 1641/7Тираж 518Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Рауилская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный шарнир | 1983 |
|
SU1222344A1 |
| Универсальный шарнир | 1983 |
|
SU1098597A1 |
| Универсальный шарнир | 1983 |
|
SU1251993A1 |
| Универсальный шарнир | 1984 |
|
SU1224028A1 |
| Универсальный шарнир шпинделя | 1982 |
|
SU1045966A1 |
| Универсальный шарнир | 1985 |
|
SU1301503A1 |
| Кривошипный шатунно-ползунный механизм поршневой машины | 2021 |
|
RU2771595C1 |
| БЕСКРИВОШИПНЫЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2187673C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| ШАРНИР ШПИНДЕЛЯ ПРОКАТНОГО СТАНА | 1994 |
|
RU2089308C1 |
| Универсальный шарнир | 1983 |
|
SU1098597A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
