второй поршневой гидроцилиндр 9 со штоком 10 Электромагниты 16, 17 электрического гидрораспределителя 1 5 - соединены с выходами блока 14 управ ления, В исходном положении, когда стопа 1 оторвана от опоры, датчик 27
1
Изобретение относится ; к медици1г- ской технике и может быть использовано при протезировании нижних конечностей „
Цель изобретения - уменьшение энергозатрат инвалида и асимметрии походки о
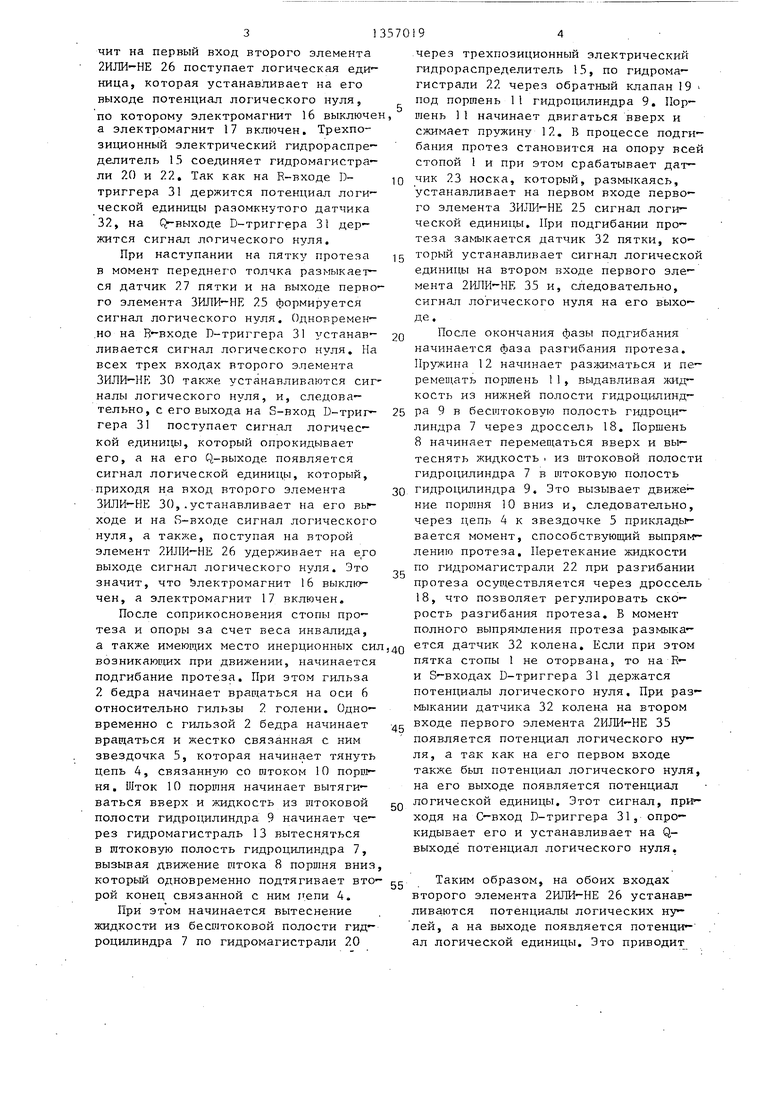
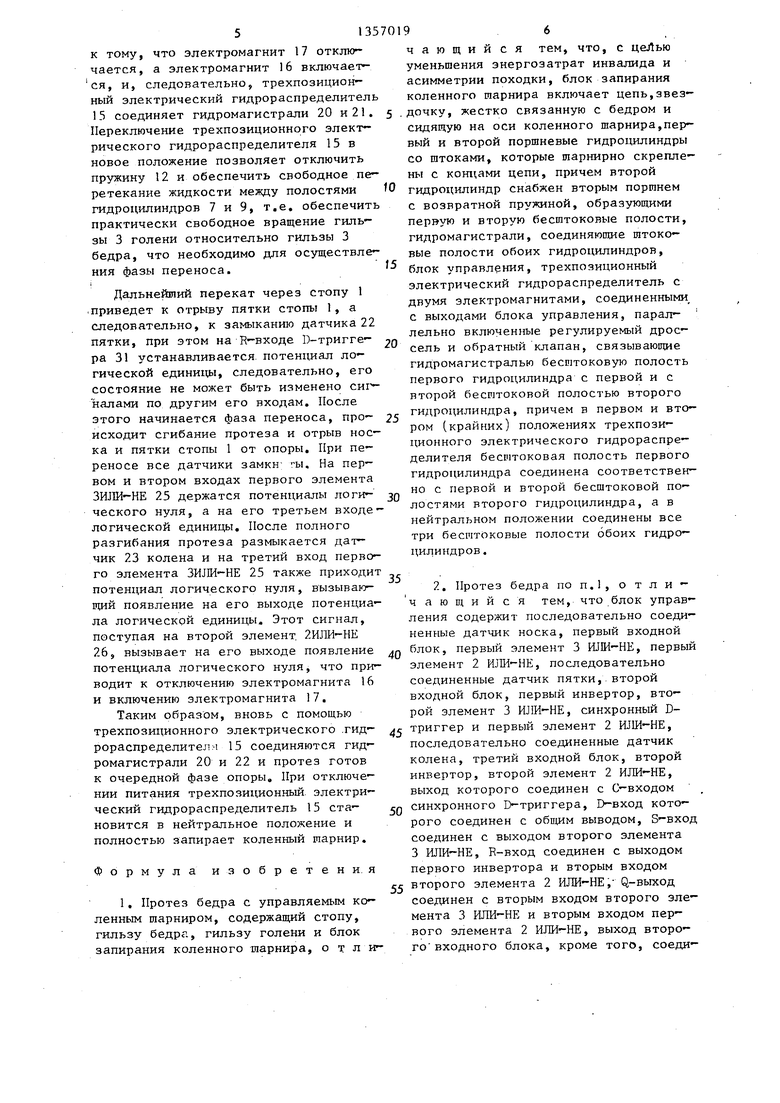
На фиг представлен протез бедра общий вид; на фиг,2 сечение А-А на фиГо на фиг,3 - электрическая схема блока управления
Устройство содержит стопу 1, гильзу 2 бедра, гильзу 3 голени, цепь 4 и звездочку 5р жестко связанную с гильзой 2 бедра и сидящую на оси 6 коленного шарнира, первый поршневой гидро цилиндр 7 со штбком 8, второй порпшевой гидроцилиндр 9 со штоком lOj которые шарнирно скреплены с кон- цами цепи 4, второй поршень 11 с воз- вратной пружиной )2 второго гидро- цилиндра 95 гидромагистраль 13 што- ковых полостей обоих гидроцилиндров
7 и 95 блок 14 управления, трехпозиционньш электрический гидрораспреде- литель 15 с двумя электромагнитами 16 .и 17, соединенными с выходами блока 14 управления, параллельно включенные регулируемый дроссель 18 и 30 обратный клапан 19, гидромагистраль 20 бесштоковой полости первого гидро- . цилиндра, гидромагистраль 21 первой бесштоковой полости и гидромагистраль - 22 второй бесштоковой полости второго 35 гидроцилиндра 9, образующие систему
запирания коленного шарнира I
БЛОК 14 управления содержит последовательно соединенные датчик 23 носка, первый входной блок 24j первый элемент ИЛИ-НЕ 3 25, первьй элемент ИЛИ-НЕ2 26s последовательно соединен ные датчик 27 пятки, второй входной блок 28, первый инвертор 29, второй элемент 3 30, синхронный Б-триг°
-
357019
пятки и датчик 23 носка замкнуты,При выпрямленном в коленном шарнире про тезе датчик 32 колена разомкнут, С помощью трехпозиционного гидрораспре- делителя 15 соединяются гидромагист- рали 20 и 22, з,п. ф-лы, 3 ил.
5 0
5
0 5
гер 31 и первый элемент 2ИЛИ-НЕ 26, последовательно соединенные датчик 32 колена, третий входной блок 33, второй инвертор 34, второй элемент 2ИЛИ-НЕ 35, выход которого соединен с С-входом синхронного Д-триггера 31, D-вход которого соединен с общим выводом, S-вход соединен с выходом второго элемента ЗИЛИ-НЕ 30, R-вход соединен с выходом первого инвертора
29и вторым входом второго элемента 2ИЛИ-НЕ 35, Q-выход соединен с вторым входом второго элемента ЗИЛИ-НЕ
30и вторым входом первого элемента 2Ш1И-НЕ 26, выход второ го входного блока 28, кроме того, соединен с вторым входом первого элемента ЗШШ-НЕ 25s третий вход которого подключен
к выходу второго инвертора 34, а выход третьего входного блока 33 соеди нен с третьим входом второго элемента ЗИЛИ-НЕ 30, третий инвертор 36, первый электронный ключ 37, второй электронный ключ 38, выходы которых являются выходами блока 14 управления, а входы подключены к выходу первого элемента 2ИЛИ-НЕ 26, причем второй электронный ключ 38 подключен через третий инвертор 36. I
Устройство работает следуюпщм образом.
В исходном состоянии, когда стопа 1 оторвана от опоры, датчик 27 пятки и датчик 23 носка замкнуты. При вы- прямленном в коленном шарнире протезе датчик 32 колена разомкнут, при сгибании протеза датчик 32 колена замыкается,
В момент окончания фазы переноса перед передним толчком протез выпрямлен, датчики 27 и 23 замкнуты, а датчик 32 разомкнут, на всех трех входах первого элемента ЗИЛИ-НЕ 25 держатся сигналы логического нуля,зна-
чит на первый вход второго элемента 2ИЛИ-НЕ 26 поступает логическая еди ница, которая устанавливает на его выходе потенциал логического нуля, по которому электромагнит 16 выключе а электромагнит 17 включен, Трехпо- зиционный электрический гидрораспре- делитель 15 соединяет гидромагистра- ли 20 и 22. Так как на R-входе D- триггера 31 держится потенциал логической единицы разомкнутого датчика 32, на (выходе D-триггера 31 держится сигнал логического нуля.
При наступании на пятку протеза в момент переднег О толчка размыкает ся датчик 27 пятки и на выходе первого элемента ЗШТИ-НЕ 25 формируется сигнал логического нуля. Одновремен- .но на R-входе D-триггера 31 устанав- ливается сигнал логического нуля. На всех трех входах второго элемента ЗИЛИ-НК 30 также устанавливаются сиг налы логического нуля, и, следовательно, с его выхода на S-вход D-триг- гера 31 поступает сигнал логической единицы, который опрокидывает его, а на его Q-выходе появляется сигнал логической единицы, который, приходя на вход второго элемента ЗИЛИ-Нр 30, .устанавливает на его выходе и на S-входе сигнал логического нуля, а также, поступая на второй элемент 2ИЛИ-НЕ 26 удерживает на его выходе сигнал логического нуля. Это значит, что Электромагнит 16 выключен, а электромагнит 17 включен.
После соприкосновения стопы протеза и опоры за счет веса инвалида, а также имеющих место инерционных си возникаюощх при движении, начинается подгибание протеза. При этом гильза 2 бедра начинает врар1аться на оси 6 относительно гильзы 2 голени. Одновременно с гильзой 2 бедра начинает вращаться и жестко связанная с ним звездочка 5, которая начинает тянуть цепь 4, связанную со DITOKOM 10 ня. Шток 10 поршня начинает вытягиваться вверх и жидкость из Я1токовой полости гидроцилиндра 9 начинает через гидромагистраль 13 вытесняться в гатоковую полость гидроцилиндра 7, вызывая движение штока 8 поршня вниз который одновременно подтягивает вто рой конец связанной с ним пепи 4.
При этом начинается вытеснение жидкости из бесштоковой полости гид- роцилиндра 7 по гидромагистрали 20
5 о
о g g
5
через трехпозиционный электрический гидрораспределитель 15, по гидромагистрали 22 через обратный клапан 19 под поршень 11 гидроцилиндра 9. Поршень 11 начинает двигаться вверх и сжимает пружину 12, В процессе подгибания протез становится на опору всей стопой 1 и при этом срабатывает датчик 23 носка, который, размыкаясь, устанавливает на первом входе первого элемента ЗИЛИ-НЕ 25 сигнал логической единицы. При подгибании протеза замыкается датчик 32 пятки, который устанавливает сигнал логической единицы на втором входе первого элемента 2ИЛИ-НЕ 35 и, следовательно, сигнал логического нуля на его выходе.
После окончания фазы подгибания начинается фаза разгибания протеза. Пружина 12 начинает разжиматься и пе- ремеп;ать поршень 1 1 , выдавливая жидкость из нижней полости гидрощ-шинд- ра 9 в бесштоковую полость гщдроци- линдра 7 через дроссель 18, Поршень 8 начинает перемеп{аться вверх и вытеснять жидкость . из штоковой полости гидроцилиндра 7 в штоковую полость гидроцилиндра 9. Это вызывает движение поршня 10 вниз и, следовательно, через цепь 4 к звездочке 5 прикладывается момент, способствуюш нй выпрямлению протеза. Перетекание жидкости по гидромагистрали 22 при разгибании протеза осуществляется через дроссель 18, что позволяет регулировать скорость разгибания протеза, Б момент полного выпрямления протеза размыкается датчик 32 колена. Если при этом пятка стопы 1 не оторвана, то на R- и S-входах D-триггера 31 держатся потенциалы логического нуля. При размыкании датчика 32 колена на втором входе первого элемента 2ИЛИ-НЕ 35 появляется потенциал логического нуля, а так как на его первом входе также бьш потенциал логического нуля, на его выходе появляется потенциал логической единицы. Этот сигнал, ходя на С-вход D-триггера 31, опрокидывает его и устанавливает на Q- выходё потенциал логического нуля.
Таким образом, на обоих входах второго элемента 2ИЛИ-НЕ 26 устанавливаются потенциалы логических ну лей, а на выходе появляется потенци- ал логической единицы. Это приводит
513570
к тому, что электромагнит 17 отклю чается, а электромагнит 16 включает ся, и, следовательно, трехпозицион- ный электрический гидрораспределитель 15 соединяет гидромагистрали 20 и 21. 5 Переключение трехпозиционного электрического гидрораспределителя 15 в новое положение позволяет отключить пружину 12 и обеспечить свободное перетекание жидкости между полостями 0 гидроцилиндров 7 и 9, т.е. обеспечить практически свободное вращение гильзы 3 голени относительно гильзы 3 бедра, что необходимо для осуществления фазы переноса.
t5
Дальнейший перекат через стопу 1 -приведет к отрыву пятки стопы 1, а следовательно, к замыканию датчика 22 пятки, при этом на R-входе 1)-тригге- ра 31 устанавливается потенциал логической едини1Ц 1, следовательно, его состояние не может быть изменено сих - налами по другим его входам. После этого начинается фаза переноса, про- исходит сгибание протеза и отрыв носка и пятки стопы 1 от опоры. При переносе все датчики замки; Ы. На первом и втором входах первого элемента ЗИЛИ-НЕ 25 держатся потенциалы логи- ческого нуля, а на его третьем входе логической единицы. После полного разгибания протеза размыкается датчик 23 колена и на третий вход первого элемента ЗШШ-НЕ 25 также приходит потенциал логического нуля, вызывающий появление на его выходе потенциала логической единицы. Этот сигнал, поступая на второй элемент. 2ИЛИ-НЕ 26, вызывает на его выходе появление потенциала логического нуля, что приводит к отключению электромагнита 16 и включению электромагнита 17.
Таким образом, вновь с помощью трехпозиционного электрического .гид- рораспределителя 15 соединяются гидромагистрали 20 к 22 и протез готов к очередной фазе опоры. При отключении питания трехпозиционный- электрический гидрораспределитель 15 ста- новится в нейтральное положение и полностью запирает коленный шарнир.
Формула изобретения
1. Протез бедра с управляемым коленным щарниром, содержащий стопу, гильзу бедра, гильзу голени и блок запирания коленного шарнира, о т л и
5 0t5
20 25 зоQ
о
55
96
чающий ся тем, что, с цеЛью уменьшения энергозатрат инвалида и асимметрии походки, блок запирания коленного шарнира включает цепь,звездочку, жестко связанную с бедром и сидящую на оси коленного шарнира,первый и второй поршневые гидроцилиндры со штоками, которые шарнирно скреплены с концами цепи, причем второй гидроцилиндр снабжен вторым поршнем с возвратной пружиной, образующими первую и вторую бесштоковые полости, гидромагистрали, соединяющие штоко- вые полости обоих гидроцилиндров, блок управления, трехпозиционный электрический гидрораспределитель с двумя электромагнитами, соединенными с выходами блока управления, парал- лельно включенные регулируемый дроссель и обратный клапан, связывающие гидромагистралью бесштоковую полость первого гидроцилиндра с первой и с второй бесштоковой полостью второго гидроцилиндра, причем в первом и втором (крайних) положениях трехпозиционного электрического гидрораспре- делителя бесптоковая полость первого гидроцилиндра соединена соответственно с первой и второй бесштоковой полостями второго гидроцилиндра, а в нейтральном положении соединены все три бесштОковые полости обоих гидро- цилиндров.
2. Протез бедра по п.1, отличающийся тем, что блок управления содержит последовательно соединенные датчик носка, первый входной блок, первый элемент 3 ШШ-НЕ, первый элемент 2 ШТИ-НЕ, последовательно соединенные датчик пятки, второй входной блок, первый инвертор, второй элемент 3 ИЛИ-НЕ, синхронный D- триггер и первый элемент 2 ШШ-НЕ, последовательно соединенные датчик колена, третий входной блок, второй инвертор, второй элемент 2 ИЛИ-НЕ, выход которого соединен с С-входом синхронного D-триггера, D-вход которого соединен с обпд1м выводом, Б-вход соединен с выходом второго элемента 3 ИЛИ-НЕ, R-вход соединен с выходом первого инвертора и вторым входом второго элемента 2 ИЛИ-НЕ , Q-выход соединен с вторым входом второго элемента 3 ИЛИ-HEI и вторым входом первого элемента 2 ИЛИ-НЕ, выход второго входного блока, кроме того, соединен с вторым входом первого элемента, 3 ИЛИ-НЕ, третий вход которого под- ключей к выходу второго инвертора, а выход третьего входного блока соединен с третьим входом второго элемента 3 ИЛИ-НЕ, третий инвертор, первый
и второй электронные ключи, выходы которых являются выходами блока управления , а входы подключены к выхо- ду первого элемента 2 ИЛИ-НЕ, причем 5 второй электронный ключ подключен
через третий инвертор,
(риг.2
Редактор А.Шандор
(риг.з
Составитель В.Аниськин
Техред М.Дидык Корректор С.Черни
Заказ 5917/3Тираж 595Подписное
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий ,, 113035, Москва, М-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4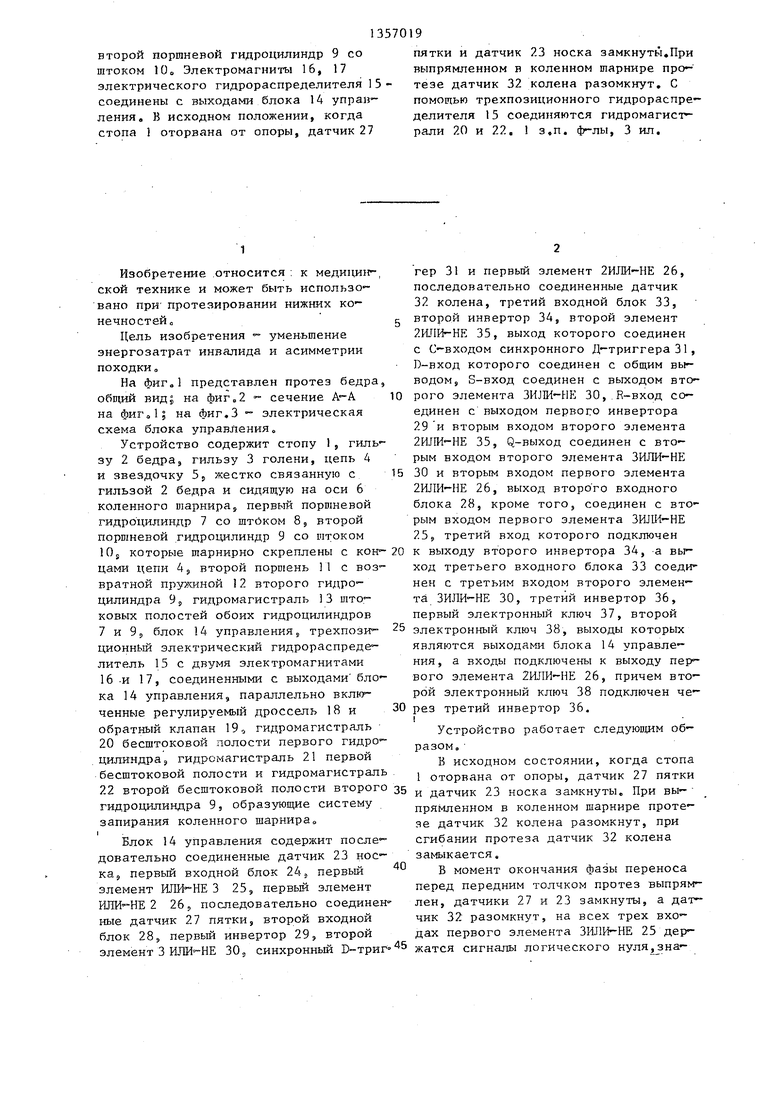
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления коленным механизмом протеза бедра | 1985 |
|
SU1333333A1 |
| Протез бедра с управляемым коленным шарниром | 1985 |
|
SU1351599A1 |
| Коленный шарнир | 1986 |
|
SU1428371A1 |
| Коленный механизм протеза бедра | 1985 |
|
SU1421333A1 |
| Система управления фрикционной муфтой | 1988 |
|
SU1638040A1 |
| Протез бедра | 1985 |
|
SU1292763A1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| ПРОТЕЗ БЕДРА | 1992 |
|
RU2043091C1 |
| Механизм регулирования закрытой высоты пресса с гидравлическим предохранителем от перегрузки | 1981 |
|
SU1027062A1 |
| Протез нижней конечности | 1983 |
|
SU1175472A1 |
Изобретение относится к медицинской технике. Цель изобретения - уменьшение энергозатрат инвалида и асимметрии походки. Устройство содержит стопу 1, гильзу 2 бедра, гильзу 3 голени, цепь 4 и звездочку, первый поршневой гидроцилиндр 7 со штоком 8, сл Дуг.7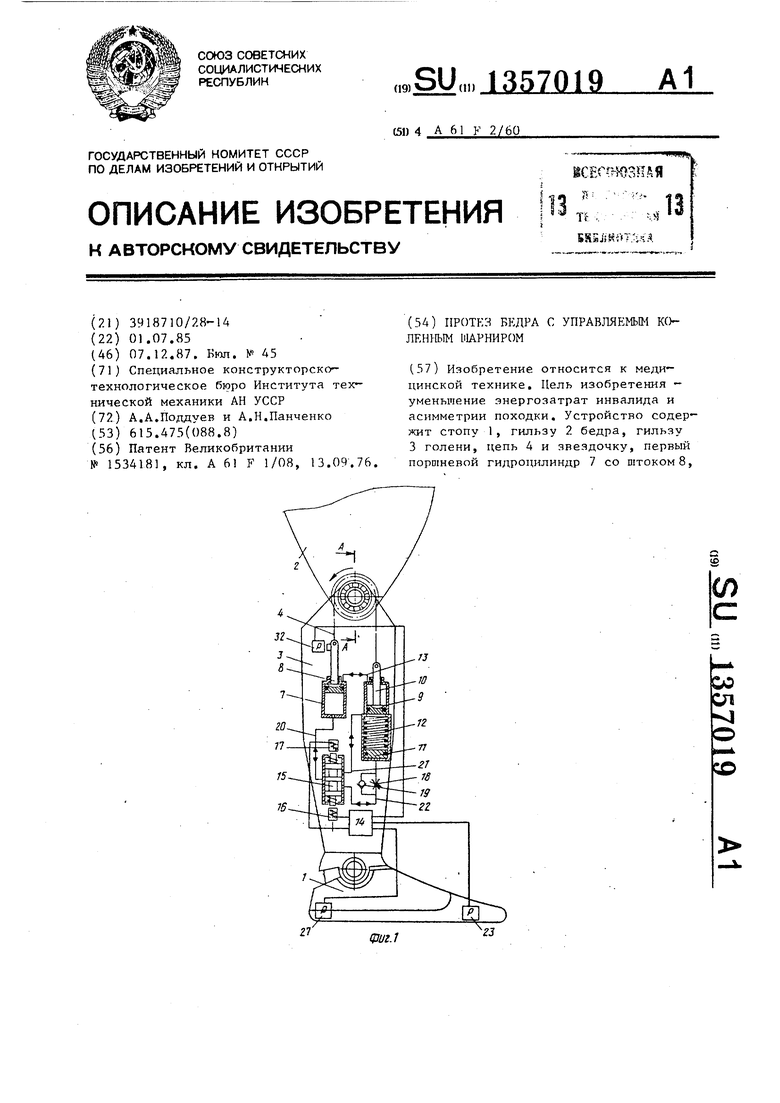
| Устройство для бурения скважин большого диаметра | 1988 |
|
SU1534181A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
