1 1
Изобретение относится к измерительной технике и может быть использовано для измерения амплитуды и частоты вибраций- механизмов и машин,
Целью изобретения является повьше ние точности измерения вибраций путем линеаризации упругих сил подвеса инерционного элемента вибродатчика.
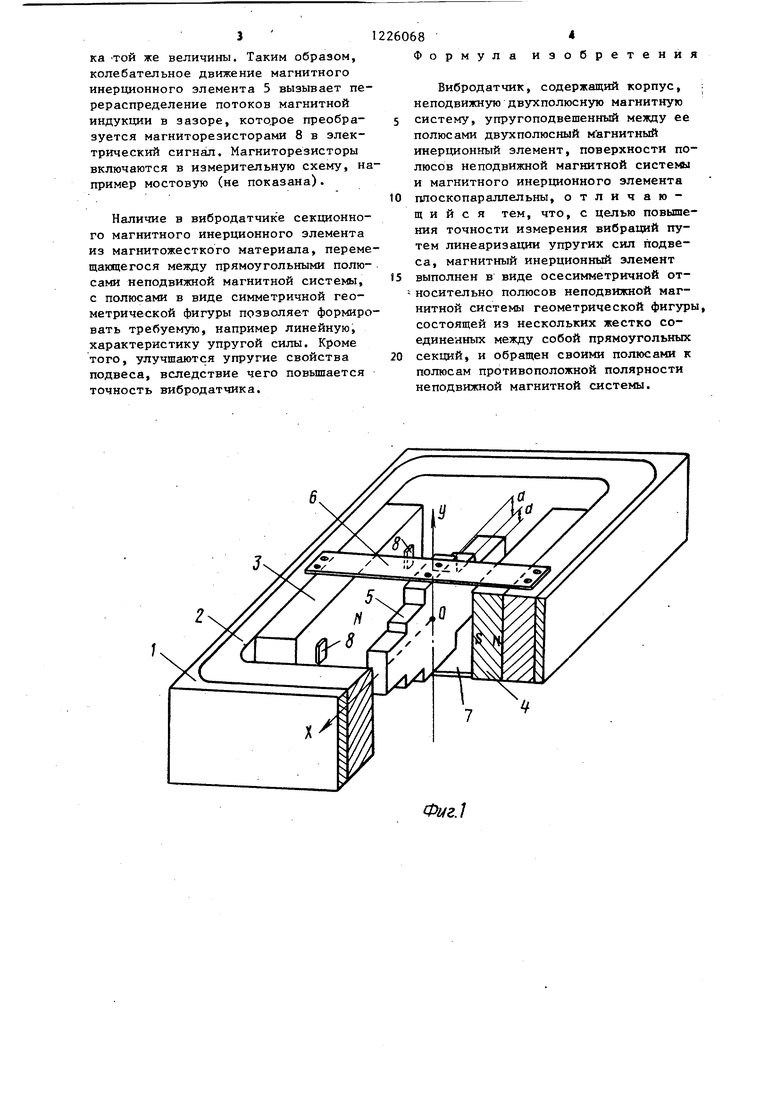
На фиг, представлен вибродатчик, общий вид; на фиг,2 - характеристика упругой силы Fjj подвеса в зависимости от амплитуды виброперемещения инерционного элемента вибродатчика по оси Y,
Вибродатчик содержит корпус 1 и укрепленную на нем неподвижную двухполюсную магнитную систему, выполненную в виде магнитопровода 2 и двух постоянных магнитов 3 и 4, Инерционным элементом 5 вибродатчика является постоянный магнит, выполненный в виде осесимметричной относительно полюсов неподвижной магнитной системы геометрической фигуры, состоящей из нескольких жестко соединенных между собой прямоугольных « секций. Инерционньпй элемент 5 закреплен на плоских упругих пружинах 6 и 7 в зазоре между постоянными магнитами 3 и 4 и обращен своими полюсами к полюсам противоположной полярности неподвижной магнитной системы. Пружины 6 и 7 закреплены на маг- нитопроводе 2 вибродатчика. На полюсах магнитов 3 и 4 укреплены магни- торезисторы 8, Ось Y является измерительной осью вибродатчика.
Вибродатчик работает следукяцим образом.
Магнитный инерционный элемент 5, подвешенный на плоских пружинах 6 и 7, перемещается под действием вибраций в зазоре между полюсами постоянных магнитов 3 и 4, закрепленных на корпусе 1, устанавливаемом в процессе контроля на контролируемом объекте (не показан), Поверхности полюсов магнитов 3 и 4 неподвижной магнитной системы и магнитного инерционного элемента 5 плоскопараллельны, и их магнитные потоки совпадают по направлению, что обеспечивает рав номерное распределение индукции а зазоре между полюсами. При перемещении инерционного элемента под действием вибраций его магнитное поле и магнитное поле неподвижной магнитной системы взаимодействуют друг с дру26068,
гом, создавая при этом силу F , которая стремится возвратить магнитный инерционный элемент 5 в нейтральное положение. Сила F пропорциональна 5 ппощади полюса магнитного инерционного элемента, выдвинутой возмущающим воздействием за пределы полюсов магнитов 3 и 4 неподвижной магнитной системы. Это позволяет, подбирая фор10 му полюсов магнитного инерционного элемента, формировать требуемую, например линейную, характеристику жесткости его подвеса,
Дпя этого полюсам магнитного инер15 ционнрго элемента 5 придают форму осесимметричной относительно полюсов неподвижной магнитной системы фигуры, состоящей из прямоугольных секций, Размеры секций и их количество выби20 раются расчетным путем, причем число секционных участков и ширина участка b зависят от максимально возможной амплитуды перемещения магнитного инерционного элемента, а также от
25 требуемой точности получения формы характеристики упругой силы 7 подвеса. Чем выше жесткость подвеса, тем меньше максимальная амплитуда перемещения инерционного элемента и,
30 следовательно, необходимо уменьшать ширину его прямоугольных секций по сравнению, например, с подвесом, обладающим малой жесткостью.
Упругая сила подвеса инерционного
, элемента датчика зависит от перемещения (фиг,2), Ь- ширина участков, на которые развивается желаемая характеристика упругой силы подвеса от перемещения инерционного элемента, Шири Q на участка Ь определяет ширину секций О инерционного элемента по оси Y,
Плоские пружины 6 и 7 обеспечивают устойчивость магнитного инерционного элемента в поперечном нап45 равлении. Их толщина выбирается минимально возможной, .
Магниторезисторы 8 установлены на полюсных поверхностях магнитов 3 и 4 неподвижной магнитной системы таким
50 образом, что половина поверхности
каясдого из них находится в поле, создаваемом секцией магнитного инерционного элемента 5. При перемещении инерционного элемента одни магниторе55 зисторы получают приращение сопротивления одиого знака пропорционально амплитуде перемещения, а другие - приращение сопротивления другого знака ТОЙ же величины. Таким образом, колебательное движение магнитного инерционного элемента 5 вызывает перераспределение потоков магнитной индукции в зазоре, которое преобразуется магниторезисторами 8 в электрический сигнал. Магниторезисторы включаются в измерительную схему, например мостовую (не показана).
Наличие в вибродатчике сек1Д1онно- го магнитного инерционного элемента из магнитожесткого материала, перемещающегося между прямоугольными полю- сами неподвижной магнитной системы, с полюсами в виде симметричной геометрической фигуры позволяет формировать требуемую, например линейную, характеристику упругой силы. Кроме того, улучшаются упругие свойства подвеса, вследствие чего повьшается точность вибродатчика.
Формула изобретения
Вибродатчик, содержащий корпус, -. неподвижную двухполюсную магнитную
систему, упругоподвешенный между ее полюсами двухполюсный м агнитный инерционный элемент, поверхности полюсов неподвижной магнитной системы и магнитного инерционного элемента
НПОскопараллельны, отличающийся тем, что, с целью повьше- ния точности измерения вибраций путем линеаризации упругих сил подвеса, магнитный инерционный элемент
выполнен в виде осесимметричной от- носительно полюсов неподвижной магнитной системы геометрической фигуры, состоящей из нескольких жестко соединенных между собой прямоугольных
секций, и обращен своими полюсами к полюсам противоположной полярности неподвижной магнитной системы.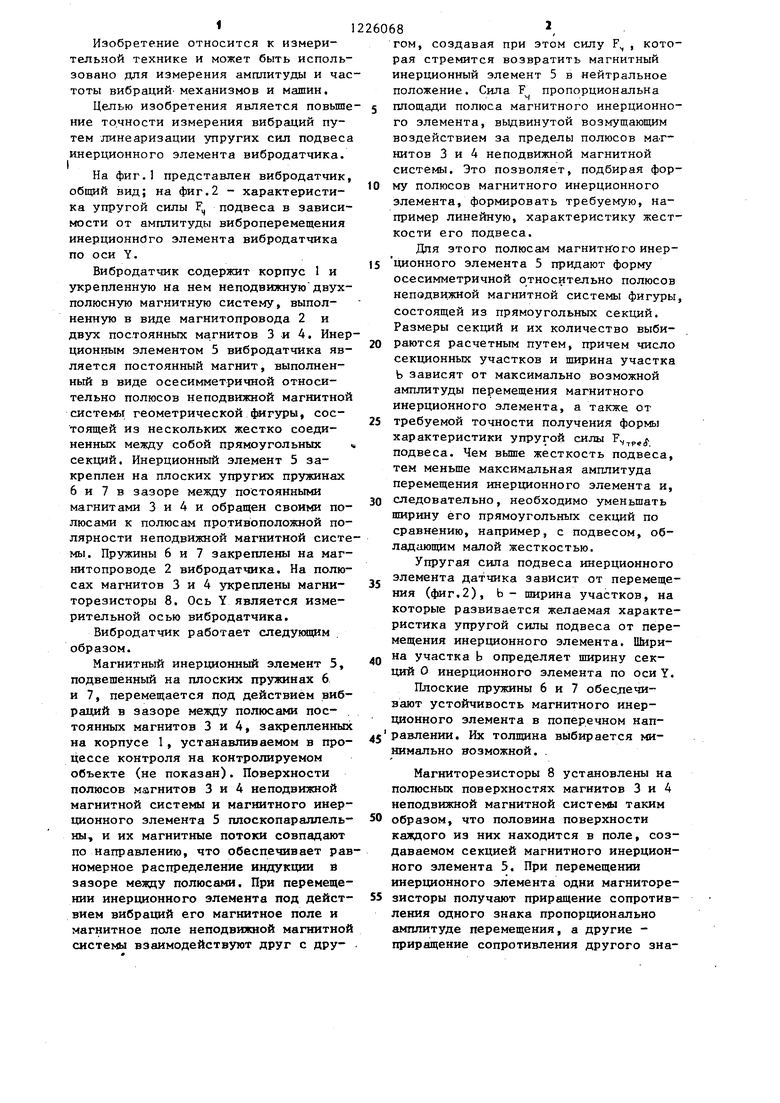
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1979 |
|
SU883745A1 |
| Магнитная пружина | 1984 |
|
SU1241068A1 |
| Виброметр | 1989 |
|
SU1716335A1 |
| Сейсмоприемник | 1979 |
|
SU842678A1 |
| ВИБРОДАТЧИК | 2013 |
|
RU2535646C2 |
| ВИБРОКОНТАКТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЛИНЕЙНЫХ ИЗМЕРЕНИЙ | 1990 |
|
RU2016374C1 |
| Вибродатчик | 1990 |
|
SU1778549A1 |
| Акселерометр | 1986 |
|
SU1363077A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2009 |
|
RU2410703C1 |
Изобретение относится к измерительной технике и позволяет повысить точность измерений параметров вибраций (амплитуды и частоты) путем линеаризации упругих сил подвеса магнитного инерционного элемента вибродатчика, содержащего также неподвижную магнитную систему с закрепленными на поверхностях полюсов ее магнитов магниторезисторами. Магнитный ;инерционный элемент вибродатчика выполнен в виде осесимметричной геометрической фигуры, состоя15ей из нескольких жестко соединенных между собой прямоугольных секций, и обращен своими полюсами к полюсам противоположной полярности неподвижной магнитной системы. Плоские пружины обеспечивают устойчивость магнитного инерционного элемента в поперечном направлении. Размеры секций инерционного магнитного элемента и их количество выбираются расчетным путем, причем число секционных участков и их ширина выбираются с учетом максимально возможной амплитуды перемещений инерционного элемента, а также требуемой точности получения формы характеристики упругой силы подвеса. При перемещении инерционного элемента одни магниторезисторы получают приращение сопротивления одного знака пропорционально амплитуде перемещения, а другие - приращение сопротивления другого знака той же величины. Колебательные движения инерционного элемента вызывают перераспределение потоков магнитной индукции в зазоре, которое преобразуется магниторезисторами в электрической сигнал. 2 ил.
Фиг.1
yj
f Hz
%
Редактор О.Юрковецкая
Составитель Т.Бычкова Техред И.Попович
Заказ 2IП/29 Тираж 507Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое пр1едприятие, г. Ужгород, ул. Проектная, 4
X
2l
X
в 28 38
Фиг. г
Корректор А.Ференц
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Control engineering, № 6, June, 1957, p | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
