Изобретение относится к измерительной технике и может быть использовано для измерения вибраций механизмов и машин в широком диапазоне частот и амплитуд.
Известны датчики, предназначенные для измерения вибраций с пьезоэлектрическими, индуктивными и другими преобразователями, однако они имеют ряд существенных недостатков, приводящих к ошибкам в измерении, вызванных несовершенством механических систем и их температурными нестабильностями.
Из известных решений наиболее близким по технической сущности к изобретению, выбранный в качестве прототипа, является индуктивный датчик вибраций, содержащий цилиндрический корпус, размещенный в нем инерционный элемент, выполненный в виде цилиндрического постоянного магнита, магнитный подвес инерционного элемента, изготовленный в виде двух постоянных магнитов, закрепленных на торцах корпуса, соосно с инерционным элементом и ориентированных полюсами навстречу одноименным полюсам инерционного элемента, и электрический преобразователь.
Однако данный датчик обладает погрешностями измерений, т.к. используя в качестве преобразователя катушку индуктивности, невозможно производить точные измерения, т.к. величина наводимой ЭДС в катушках зависит от скорости и перемещения инерционного магнита, а также ограни- чениостью частотного и амплитудного диапазонов измерений в виде постоянной жесткости магнитного подвеса.
Целью изобретения является расширение частотного и амплитудного диапазона измерений и повышение точности измерения.
Поставленная цель достигается тем, что датчик снабжен двумя крышками, установленными на резьбе на горцах корпуса с возможностью регулирования жесткости подвеса, а также заменен индуктивный преобразователь вибраций инерционного оле- мента на два датчика Холла, размещенных симметрично относительно продольной оси корпуса в плоскости магнитной нейтрали инерционного элемента
На фиг. 1 приведена конструкция датчика; на фиг. 2 - его выходная характеристика.
Датчик (фиг. 1) состоит из трехступенчатого корпуса 1, 2. К центральному корпусу 2 пут ем ввинчивания крепятся боковые крышки 1, в центре которых во втулках 3 4 закреплены постоянные магниты 5, направленные одноименными полюсами к магниту б сейсмомассы В центральном корпусе 2 помещена втулка 7, в которой закреплены симметрично в щелях два Холловских элемента 8. Магнит 6 свободно перемещается во втулке. Магнит имеет форму прямоугольника и выполнен из высокоэрцитивного материала, например КС-37А. Втулка 7 фиксируется в корпусе винтом 9, а для исключения возможности поворота магнита во втулке и уменьшения
трения вдоль втулки 7 нарезаны пазы. Корпус датчика и крышки выполнены из немагнитного материала. Втулка 3 заканчивается винтом, при помощи которого крепится к измеряемому объекту. Втулки 3, 4 имеют
резьбу и ввинчиваются в боковые крышки. К центру корпуса 2 крепится разъем для подвода питания и снятия выходного сигнала. Вибродатчик работает следующим образом.
В исходном состоянии путем перемещения центральной втулки 7 устанавливают Холловские элементы на магнитную нейтраль магнита 6 и стопорят втулку болтом 9. С помощью боковых крышек 1 устанавливают требуемую жесткость подвеса сейсмомассы в зависимости от измеряемой частоты и амплитуды вибраций измеряемого объекта. Напряжение на выходе датчика в исходном состоянии равно нулю. Затем
датчик резьбовым соединением крепится к измеряемому объекту. Вибрации корпуса датчика вызывают смещение Холловских элементов относительно сейсмического магнита 6, в результате чего на выходе Холловских элементов наводится ЭДС, величина которой пропорциональна амплитуде вибраций, а частота равна частоте вибраций объекта. Холловские элементы соединены последовательно, в результате чего исключается изменение сигнала в зависимости от отклонения магнита сейсмомассы от оси датчика и увеличение выходного сигнала в два раза.
Формула изобретения
1. Вибродатчик, содержащий цилиндрический корпус, размещенный в нем инерционный элемент, выполненный в виде цилиндрического постоянного магнита, магнитный подвес инерционного элемента, выполненный в виде двух постоянных магнитов, закрепленных на торцах корпуса соосно с инерционными элементами и ориентированных полюсами навстречу одноименным полюсам инерционного элемента, и электрический преобразователь вибраций инерционного элемента, отличающий- с я тем, что, с целью расширения частотного и амплитудного диапазона он снабжен двумя крышками, установленными на резьбе на
торцах корпуса с возможностью регулировки их осевого положения.
2. Вибродатчик по п. 1, о т л и ч а ю щ и- й с я тем, что, с целью повышения точности и чувствительности, электрический преобразователь вибрации инерционного элемента выполнен в виде пары датчиков Холла, размещенных симметрично относительно продольной оси корпуса в плоскости магнитной нейтрали инерционного элемента,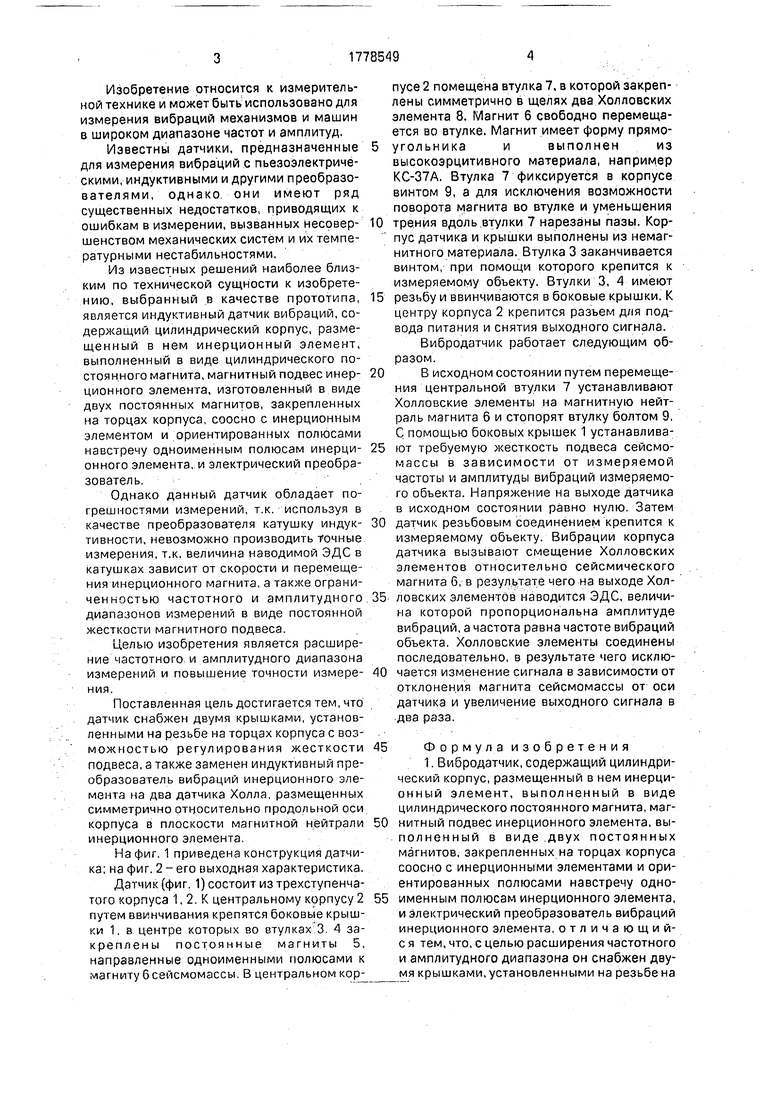
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик виброперемещений | 1985 |
|
SU1272124A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Вибродатчик | 1984 |
|
SU1226068A1 |
| Акселерометр | 1986 |
|
SU1363077A1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ И ЧАСТОТЫ ВРАЩЕНИЯ РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА ДЛЯ СИСТЕМЫ ЗАЖИГАНИЯ | 2007 |
|
RU2364746C2 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1999 |
|
RU2156478C1 |
| Индуктивный датчик вибраций | 1981 |
|
SU1302147A1 |
| Вибродатчик | 1990 |
|
SU1747939A2 |
| Акселерометр | 1979 |
|
SU883745A1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |

Изобретение относится к измерительной технике и имеет целью расширение диапазона измерений вибродатчика за счет обеспечения регулирования жесткости магнитного подвеса инерционного элемента. Инерционный элемент выполнен в виде постоянного магнита, размещенного между двумя другими постоянными магнитами, закрепленными на торцевых кромках, навинченных на торцы корпуса, с возможностью изменения их осевого положения. Это обеспечивает регулирование зазора между магнитами, от которого зависит жесткость магнитного подвеса. Для измерения вибрации инерционного элемента использованы элементы Холла, расположенные симметрично относительно продольной оси корпуса в плоскости магнитной нейтрали инерционного элемента. 1 з.п. ф-лы, 2 ил. 5 ЈЖМН ./ ё Ч 4 оо ел fc
Фиг.Ј
| Гик Л.Д | |||
| Измерение вибраций | |||
| Новосибирск: Наука, 1972 | |||
| с | |||
| Горный компас | 0 |
|
SU81A1 |
| Способ измерения высоты микронеровностей шероховатой поверхности и устройство для его осуществления | 1985 |
|
SU1302141A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
