Изобретение относится к радиои мерительной технике и может быть использовано для измерения группового времени запаздьшания радиоустройств.
Цель изобретения повышение точности измерения и-расширение функци .нальных возможностей устройства.
На чертеже приведена структурная схема предлагаемого устройства.
Измеритель группового времени запаздьшания содержит генератор 1 качающейся частоты, модулятор 2, де текторы 3 и 4, исследуемьй объект 5j фазометр 6, смесители 7 и 8, ин формационный регистр 9, микропроцессор 10 регистр 11 управления, ком мутатор 12, синтезатор 13 частот и р е гис тр 14 пан ели упр авл е ния.
Фазометр 6 содержит усилители- формирователи 6.1 и 6,2, тригг€ р 6,3 с раздельным запуском, элемент 6.4 совпадения и счетчик.6,5 импульсов.
Микропроцессор 10 содержит блок 10.1 приоритетных прерьшаний (БПП), центральный процессор (ЦП) 10,2, оперативное запоминающее устройство (ОЗУ) 10.3, постоянное запоминающее устройство (ПЗУ) 10,4 и устрой- 10,5 отображения информации (УОИ),
Генератор 1 качающейся частоты соединен с модулятором 2, выход ко- торого подключен к детектору. 3 не- .посредственно, а к детектору 4 - через исследуемьй объект 5, Первые входы смесителей 7 и 8 соединены с, выходами детекторов 3 и 4, а выходы - с входами фазометра 6, выход которого через информационный регистр 9 подключен к системной шине данных микропроцессора 10, который посредством системной шины данных соединен через регистр 11 управления с коммутатором 12, через который второй вход модулятора 2 подключен к первым двум выходам синтезатора 13 частот, третий вьшод которого соединен с вторыми входами смесителей 7 и 8, а четвертьй - с третьим входом фазометра 6, управляющий выход которого подключен к входу записи информационного регистра 9, Кроме того, с системной шиной данных микропроцессора 10 соединен регистр 14 панели управления, управляющий выход которого и вход синхронизации генератора 1 качающей частоты подключены к входам прерьшаний микропроцессора 10,
Модулятор 2 совместно с генератором 1 качающейся частоты, коммута- торО М 12 и синтезатором 13 частот предназначены для формирования модулированного измерительного сигнала, детекторы 3 и 4 осуществляют
детектирование этого сигнала,
Смесители 7 и 8, коммутатор 12 и синтезатор 13 частот предназначены для устранения фазоамплитудной погрешности, возникающей в каналах
фазометра 6 при изменении амплитуд входньпс сигналов в процессе перестройки частоты генератора 1 качающейся частоты.
Микропроцессор 10 предназначен
для решения следующих задач: считывания и расшифровки состояния органов управления через регистр 14 панели управления; управления работой ком11утатора 12 путем выдачи соответствугощего кода в регистр 11 управления ; считывания результата измерения с выхода фазометра 6 через информационный регистр 9 и передачи его в ЦП 10.2J вычисления результатов измерений с коррекцией погрешностей и записи их в ОЗУ 10,3; преобразования измерительной информации в вид,удобньй для последующего ее вывода на УОИ 10.5,
Шкропроцессор 10 выполнен, например, на базе микропроцессорного комплекта КР 580,
Синтезатор 13 частот осуществляет фор1 1ирование сигналов с частотами
uJ-SJ,uJHuJ+SJ., а также сигнала квантующей частоты и содержит, например, три системы фазовой автоподстройки частоты, синхронизируемые напряжением опорного генератора,
Устройство работает следующим образомь
Измеритель группового времени запаздывания работает в следующих режимах: в режиме измерения группового
времени запаздьшания с коррекцией фазоамплитудной погрешности, режиме измерения группового времени запаздывания с коррекцией фазоамплитудной погрешности и собственной неравномерности измерителя; режиме измерения приращений группового времени запаздьшания; режиме сравнения измеренной характеристики группового
времени запаздьшания с эталонной характеристикой.
Рассмотрим первый режим работы - режим измерения группового времени запаздьшания с коррекцией фазоампли- тудной погрешности, который устанав- оператором с помощью органов управления измерителем. При этом импульс с управляющего выхода регистра 14 панели управления, в качестве которого используется, например, регистр К , поступает на первый вход прерьюания микропроцессора 10 (вход высокого приоритета). В результате БГШ 10.1, входы .которого являются входами прерываний микропроцессора 10, идентифицирует источник прерывания, в рассматриваемом случае - регистр 14 панели управления, и формирует сигнал запроса прерывания, по которому микропроцессор 10 переходит к выполнению подпрограммы анализа состояния органов управления. По этой подпрограмме, записанной в ПЗУ 10.4, микропроцессор 10 считьшает и расшифровывает состояние органов панели управления через регистр 14 панели управления к устанавливает первьй режим работы. Двоичный код с выхода регистра 11 управления поступает на управляющий вход коммутатора 12, устанавливая его в первое положение. В качестве коммутатора 12 используется, например, интегральная микросхема К 590 КН1.
Выходное напряжение генератора 1 качающейся частоты 1 частотой uJ, поступает на первый вход модулятора 2, например амплитудного, на второй вход которого в первом положении коммутатора 12 подается напряжение частоты 1- + Я. с первого выхода синтезатора 13 частоты. В ре- зультате на выходе модулятора 2 образуется амплитудно-модулирован- ный измерительньй сигнал с несущей частотой ) и частотой огибающей Q . При передаче такого измерительного сигнала через исследуемый объект 5 между огибающими сигналов на его входе и выходе возникает фазовый сдвиг ч, , пропорциональный групповому времени запаздывания исследуемого объекта 5 Ч, 1 (uJ + 5Z). Огибаюпще с частотой uJ+ Q и фазовым сдвигом между ними - вьщеляют- ся с помощью детекторов 4 и 3 (в рассматриваемом случае амплитудных)
и подаются на первые входы смесителей 7 и 8. При этом на вторые входы смесителей 7 и 8 подается сигнал частоты LC) с третьего выхода синтеза- тора 13 частот. В результате преобразования частот на выходе смесителей образуются сигналы с промежуточной частотой Я. и фазовым сдвигом Ч . Фазометр 6 выполняет измерение
фазового сдвига и преобразование его в цифровой код с помощью квантующих импульсов, поступающих на третий вход фазометра 6 (один из входов элемента совпадения 6.4) с
четвертого выхода синтезатора 13
частот, В результате этого на информационном выходе фазометра 6 (разрядные выходы счетчика 6,5 импуль- :ов) формируется цифровой кoдN., ,
(тропорциональный фазовому сдвигу
Ф М .ч- U Н
где Ч, - фазовый сдвиг между огибающими частоты и) + Q. ; фазоамплитудная погрешность, возникающая в каналах фазометра 6 вследствие того, что в процессе перестройки частоты уровень сигналов, поступающих на один из входов фазометра 6, изменяется, т.к. коэффициент передачи К(ии)д)исследуе- мых объектов может сущест- венно зависеть от частоты, По окончании формирования кода N, , пропорционального фазовому сдвигу 4/ , сигналом записи, поступающим с управляющего выхода фазометра 6, например, импульсом с выхода триггера 6.3, этот код записывается в информационный регистр 9. В ка- честве этого регистра используется, например, многорежимный буферный регистр К 589 ИР 12. Сигналом готов- ности, появляющимся на выходе информационного регистра 9 по окончании записи, код N помещается в центральный процессор 10.2. Затем микропроцессор 10 через регистр 11 управле- ния устанавливает коммутатор 12 во второе положение, в котором на второй вход модулятора 2 подается сигнал частоты uj - Q с второго выхода синтезатора 13 частот. Работа измерителя во втором положении коммутатора 12 аналогична его работе в первом положении. Сначала с помощью генератора 1 качающейся часто
ты и модулятора 2 формируется ампли тудно-модулированный измерительный сигнал с несущей частотой uJ и частотой огибающей jJ -SI , затем осуществляется выделение огибающих uJ - - Q , фазовый сдвиг Ч между которыми пропорционален измеряемому групповому времени запаздывания t (). После измерения и кодирования фазового сдвига на информационном выходе фазометра 6 формируется код N , пропорциональньш фазовому сдвиг-/
- - .
лч.
где М - фазовый сдвиг между огибающими частоты uJ-Й (знак фазового сдвига на входе фазометра 6 изменяется в сравнении с первым положением коммутатора 12, так как частотаuJ на вторых входах смесителей 7 и 8 выше частоты uJ - Si на его первых входах).
При этом фазоамплитудная погрешность ДЧ остается прежней, так как при подробном воспроизведении исследуемой характеристики группового времени запаздывания за время измерения одной ее дискретной точки, т.е. в обоих положениях коммутатора 12, фаза и, следовательно, амплитуда сигнала на входах фазометра 6 остаются практически неизменными
Код Nj результата измерения фазового сдвига Ч помещается в Щ 10.2, После этого микропроцессор 10 вычисляет разность двух измерений фазового сдвига в одном и в другом положениях коммутатора 12, а также производит операцию деления на два полученного результата:
(Y,-Yj/Z (4,A)-()/ 244 %) Поскольку модулирующие частоты uJ + и uJ - О. расположены симметрично относительно частоты uJ и отличаются от нее ,на низкую промежуточную частоту Я. , то фазовые сдви ги огибающих с частотами uJ + Я. и на выходе исследуемого объекта 5 практически равны ( i: -f , а их сумма соответствует удвоенному значению фазового сдвига v огибающей со средней частотой
uJ4CuJ -S2)Hu;-ni)/2, т.е Ч , У, 2 f„ .
Таким образом, после обработки с помощью микропроцессора 10 резуль0
5
0
5
0
5
0
5
0
5
татов измерений осуществляется коррекция фазоамплитудной погрещности и в ОЗУ 10.3 помещается результирующий код N , пропорциональный фазовому сдвигу
,.: - Po--(H,-%V (, + 4 J/2,
и, соответственно, групповому времени запаздывания исследуемого объекта 3 на частоте uj генератора 1 качающейся частоты, так как
.t-4 /cJ--4 ,/oJ Q-- fjfa;-Sl.
Одновременно результирующий кодМ„ поступает в УОИ 10.5.
Аналогично измеряется групповое время запаздьшания исследуемого объекта 5 на других частотах рабочего диапазона. Следовательно, во время прямого хода перестройки частоты генератора 1 качающейся частоты в ОЗУ 10.3 помещаются кодыМ результатов измерений группового времени запаздыванияIj в диапазоне частот, т.е. частотная характеристика группового времени запаздьшания исследуемого объекта 5, которая одновременно индицируется на УОИ 10.5 в удобном для оператора виде.
По окончании прямого хода перестройки частоты синхроимпульс с выхода синхронизации генератора 1 качаю-х щейся частоты поступает на второй вход прерывания микропроцессора JO (вход низкого приоритета). В результате БПП 10.1 формирует сигнал запроса. По этому сигналу микропроцессор 10 прекращает вьшолнение программы измерений, устанавливает коммутатор 12 в первое положение и после окончания синхроимпульса снова возвращается к началу программы измерений первого режима.
Рассмотрим работу измерителя во втором режиме - режиме измерения групповюго времени запаздывания с коррекцией фазоамплитудной погрешности и собственной неравномерности измерителя, который.устанавливается
аналогично первому режиму.
В этом режиме измерение выполняется в два этапа. На первом этапе осуществляется измерение собственной неравномерности измерителя (калибровка) , При этом исследуемый объект 5 отключается от измерителя, а детектор 4 подключается непосредственно к выходу модулятора 2. Работа
устройства на этом этапе полностью соответствует его работе в первом режиме Коды N результатов измерения собственной неравномерности группового времени зайаздывания измерителя в диапазоне частот (частотная характеристика) помещаются в ОЗУ 10.3.
На втором этапе исследуемый объект 5 снова подключается к измерителю и осуществля ется измерение
группового времени запаздывания ,
J
включающее в себя групповое время запаздывания исследуемого объекта и собственную неравномерность измерителя и, . Работа устройства на втором этапе аналогична его работе на первом этапе. Коды, соответствующие Lj , помещаются в ОЗУ 10,3.
Микропроцессор 10 вычисляет значения группового времени запаздывания исследуемого объекта 5 в диапазоне частот - LCJ и помещает соответствующие им коды в ОЗУ 10.3. Полученные результаты поступают в УОИ 10.5. Кроме того, по желанию оператора в УОИ 10.5 может быть введена частотная характеристика собственной неравномерности измерителя,
Таким образом, в результате учета собственной неравномерности измерителя дополнительно повьшается точность измерения.
В третьем, режиме работы - режиме измерения приращен и группового времени запаздывания Л i- , который устанавливается аналогично первым двум ре жимам, определяется изменение группового времени запаздывания в диапазоне частот относительно выбранного значения L , например, на исходной частоте генератора 1 качающейся частоты При этом используются результаты измерений, полученные во втором режиме работы. Микропроцессор 10 вычисляет разности д1 i, -4-4 определяет их знак и помещает соответствующие им коды в ОЗУ ЮоЗ. Затем результаты вычислений поступают в УОИ 10.5.
В четвертом режиме проводится сравнение измерений характеристики группового времени запаздывания исследуемого объекта 5 с эталонной ха- оактеристикой, размещенной, например в ПЗУ 10,4. В этом режиме микропроцессор Ю вычисляет отклонения Atj
результатов измерения второго режима I
KJ
относительно эталонных .ui. , определяет их знак, а
3J K-J
также помещает соответствующие им коды в ОЗУ 10.3. Затем микропроцессор 10 выводит результаты вычислений в УОП 10.5 для индикации.
Для дополнительного повьшения точности измерения осуществляется усреднение результатов измерений, которое вьтолняется программным способом одинаково во всех четьфех режимах работы. Для этого микропроцессор Ю накапливает в ОЗУ 10.Зп результатов измерений одной точки частотной характеристики группового времени запаздьшания исследуемого объекта 5, производит операции суммирования результатов этих измерений и деления полученной суммы на и 1 -п
-1-1
л
где L - усредненное значение групО
пового времени запаздывания в исследуемой точке харак- теристики
значение группового времени запаздывания, полученное в i-м измерении h- число измерений. Аналогично.осуществляется измерение других точек частотной характеристики исследуемого объекту 5.
Кроме рассмотренной выше амплитудной модуляции измерительного сигнала в устройстве может использоваться балансная или частотная модуляция. При этом функционирование устройства не изменяется, а изменяется только принцип формирования измерительного сигнала и вьщеление сигналов модулирующих частот, т.е. изменяются модулятор 2 и детекторы 3 и 4.
В измерителе группового времени запаздывания уменьшается фазоампли- тудная погрешность путем обработки с помощью микропроцессора результатов двух измерений, полученных при разных частотах модулирующего сигнала, т. е повышается точность измерений, а также обеспечивается измерение одним ycTpoitcTBOM группового времени запаздьшания, его приращения и сравнение характеристик исследуемого и эталонного объектов, т.е.
расширяются функциональные возможности предлагаемого устройства. Кроме того, благодаря применению микропроцессора дополнительно повьша- ется точность измерения путем исключения собственной неравномерности устройства из результата измерения,
Формула изобретения
Измеритель группового времени запаздывания, содержащий генератор качающейся частоты, соединенный с модулятором, выход которого подключен к одному детектору непосредственно, а к другому через клеммы для подключения исследуемого объекта, а также фазометр, отличающийся тем, что, с целью повышения точности измерения и расширения функциональных возможностей, в него введены два смесителя, информационный регистр, микропроцессор, регистр управления, коммутатор, синтезатор
Редактор Е.Папп Заказ 2130/46
Составитель М.Катанова
Техред И.Попович Корректор Т.Колб
Тираж 398Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
частот и регистр панели управления, причем первые входы смесителей соединены с Б;ыходами соотв етствуюпц х детекторов, а выходы - с входами фазометра, выход которого через информационный регистр подключен к системной шине данных микропроцессора, который посредством системной шины данных соединен через регистр управления С: коммутатором, выход которого соединен с модулятором, а двумя другими входами коммутатор соединен с первыми двумя выходами синтезатора частот,, третий выход которого Соединен с вторыми входами смесителей, а четвертый - с третьим входом фазометра, управляющий выход которого подключен к входу записи информационного регистра, кроме того, с системной шиной данных микропроцессора соединен регистр панели управления, управляющий выход которого и выход синхронизации генератора качающейся частоты подключены к входам прерьгоаний микропроцессора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель группового времени запаздывания | 1988 |
|
SU1555697A1 |
| Измеритель фазовых сдвигов | 1983 |
|
SU1182434A1 |
| Измеритель группового времени запаздывания | 1990 |
|
SU1725180A2 |
| Фазометр | 1985 |
|
SU1273837A1 |
| Измеритель фазочастотных характеристик и группового времени запаздывания | 1989 |
|
SU1626202A1 |
| Устройство для определения фазоамплитудной погрешности фазометров | 1988 |
|
SU1597764A1 |
| Цифровой интегрирующий фазометр | 1983 |
|
SU1173339A1 |
| Устройство для измерения группового времени запаздывания генераторов качающейся частоты | 1985 |
|
SU1255987A1 |
| Способ определения времени групповой передачи четырехполюсников и устройство для его осуществления | 1985 |
|
SU1270742A1 |
| Измеритель группового времени запаздывания четырехполюсников | 1976 |
|
SU600480A1 |
Изобретение относится к радио- Нзмерительной технике и может быть рспользовано для измерения группового времени запаздьшания радиоустройств. Цель изобретения - повышение точности измерения и расширение функциональных возможностей. Для достижения поставленной цели в измеритель введены: смесители 7 и 8, микропроцессор 10, регистры - информационный 9 и управления 11, коммутатор 12, синтезатор 13 частот и ре- гистр 14 панели управления. Кроме того, измеритель содержит генератор 1 качающейся частоты, модулятор 2, де текторы 3 и 4, исследуемый объект 5, фазометр 6. При этом фазометр 6 выполнен на усилителях-формирователях 6.1 и 6.2, триггере 6.3, элементе совпадения 6„4 и счетчике 6.5 импульсов. Микропроцессор 10 содержит блок 10„1 приоритетных прерываний, центральный процессор 10.2, оперативное запоминающее устройство (ЗУ) 10.3, постоянное ЗУ 10.4 и устройство 10.5 отображения информации. 1 ил . (Л to to О5 N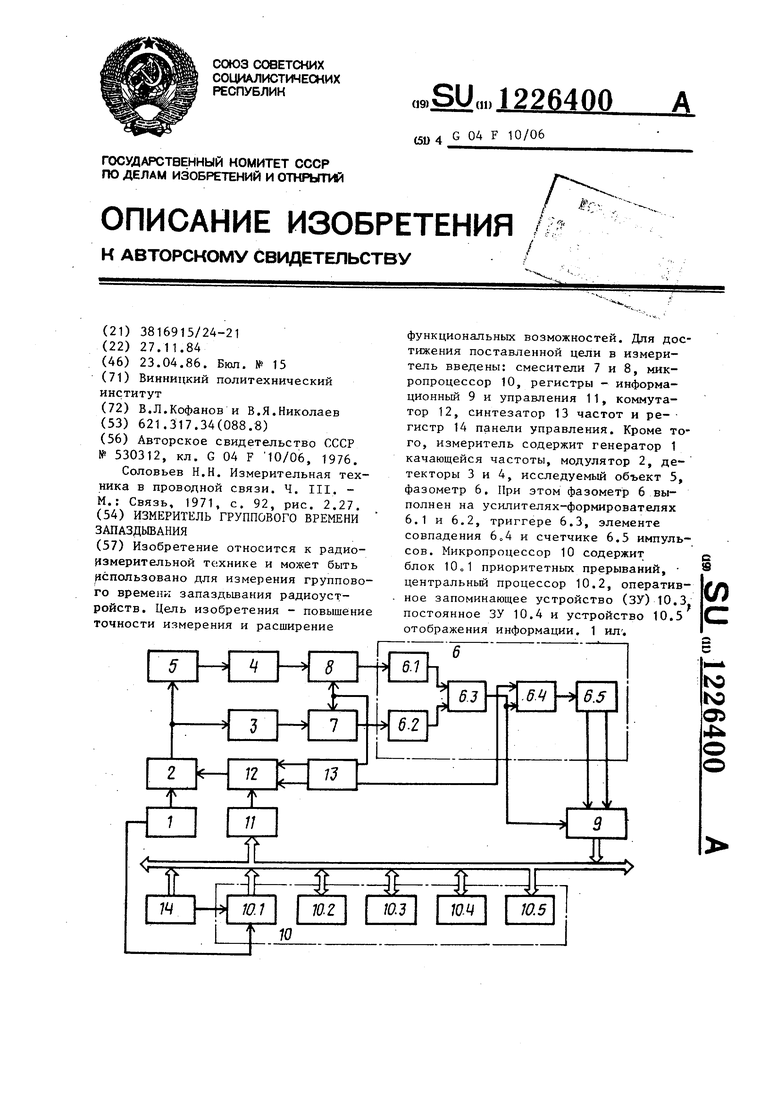
| Измеритель неравномерностей группового времени запаздывания | 1975 |
|
SU530312A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Соловьев Н.Н | |||
| Измерительная техника в проводной связи | |||
| Ч | |||
| III | |||
| - М.: Связь, 1971, с | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
