Изобретение относится к станкостроению, а именно к устройствам для автоматической смены инструмента на токарных станках с ЧПУ, обрабатывающих центрах и т. п.
Цель изобретения - повышение надежности работы головки за счет демпфирования ударных нагрузок, возникающих при взаимодействии сопряженных частей головки в процессе ее работы.
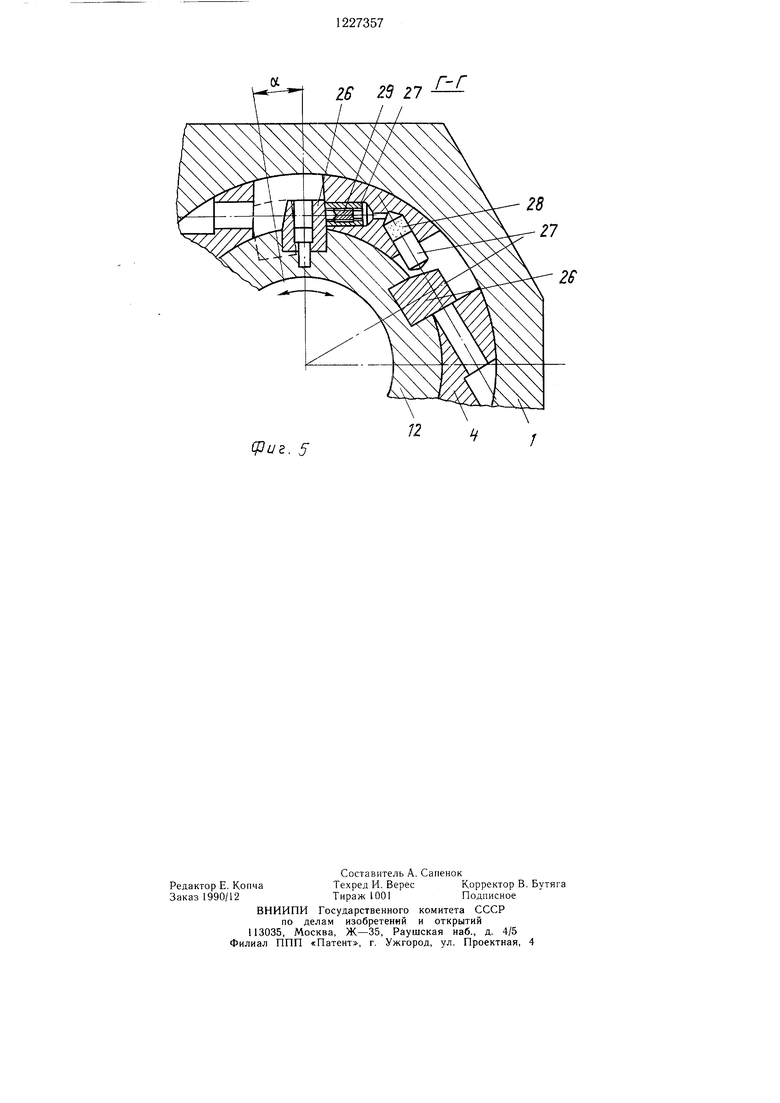
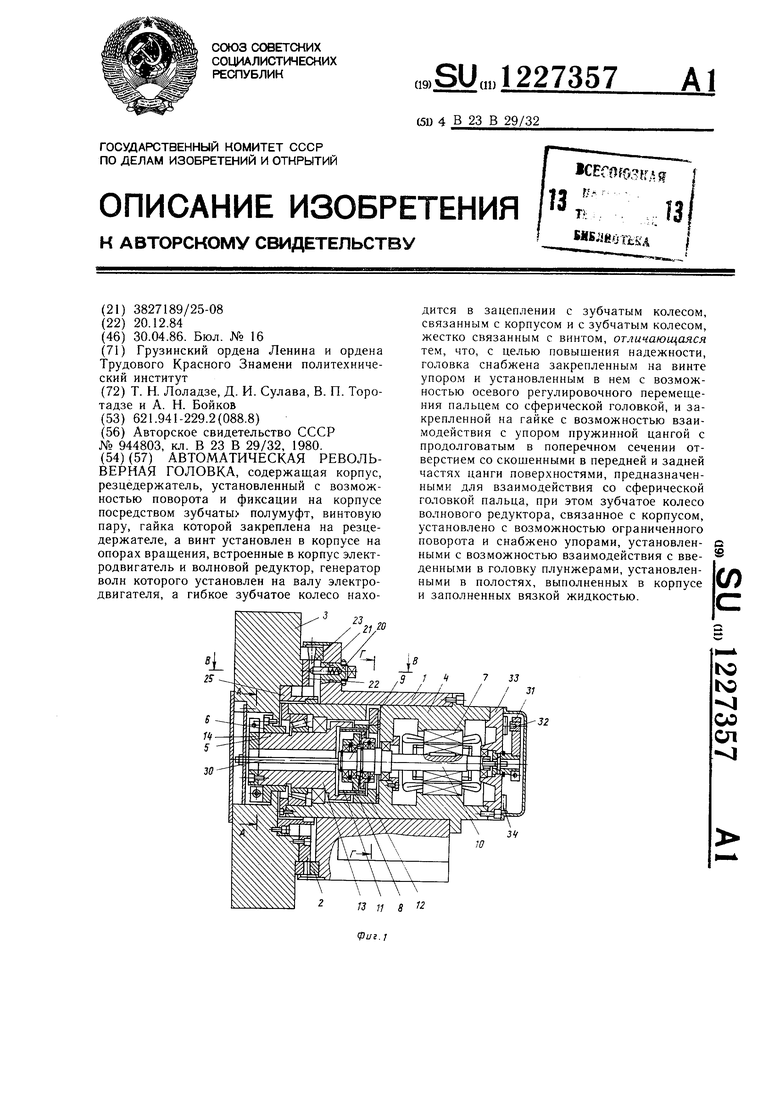
На фиг. 1 изображена револьверная головка, продольный разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - сечение Г-Г на фиг. 1.
Автоматическая револьверная головка содержит устанавлиаемый на суппорте станка корпус 1, на котором с помощью зубчатых полумуфт 2 базируется резцедержатель 3. В корпусе закреплен стакан 4, в котором на опорах качения установлен винт 5, образующий с гайкой 6, закрепленной на резцедержателе, винтовую пару. В стакан 4 встроены электродвигатель 7 и волновой редуктор, генератор волн которого выполнен в виде двух роликов 8, установленных на экси.ент- ричных щейках 9 вала 10 электродвигателя, а гибкое зубчатое колесо 11, посаженное на ролики 8, находится в зацеплении с зубчатым колесом 12 и зубчатым колесом 13, выполненным на винте 5.
На торце винта 5 закреплен фланец 14, на котором установлен упор 15 с пальцем 16 со сферической головкой. Последний имеет возможность регулирования величины вылета и входа в зацепление с пружинной цангой 17, ввинченной в опору 18, которая закреплена на торце гайки 6. Цанга 17 имеет удлиненное на величину а в поперечном сечении отверстие 19 со скощенными в передней и задней частях цанги поверхностями, предназначенными для взаимодействия со сферической головкой пальца 16.
Фиксатор 20 в зажатом состоянии установлен в корпусе 1. В фиксаторе 20 смонтирован подпружиненный палец 21, имеющий возможность осевого передвижения и входа в контакт с фиксаторным кольцом 22, установленным на резцедержателе 3 и имеющим пазы с прямой поверхностью 23 и наклонной поверхностью 24. Положение пальца 21 можно регулировать ручным проворотом и зажатием фиксатора 20 при наладке. На резцедержателе 3 установлена опора 25, скользящая по наружной поверхности стакана 4 и поддерживающая резцедержатель при рас- фиксаций.
Зубчатое колесо 12 волнового редуктора посажено в стакане 4 с зазором и поэтому может проворачиваться в обоих направлениях на угол а, который ограничивается упором в стенку стакана 4 кулачков 26, закрепленных на колесе 12 и в то же время непосредственно воздействующих на плунжеры 27. Плунжеры 27 вставлены в полость 28, выполненную в стакане 4 и заполненную упругой средой, например гидропластом. В плунжеры 27 ввинчены винты 29, обеспечивающ,ие возможность регулирования величины их вылета из полости 28.
Валик 30 левым концом жестко связан с резцедержателем 3, а правым передает только вращательное движение резцедержателя 3 поводку 31, несущему постоянный магнит 32. По пути движения магнита 32 на торце фланцевой опоры 33, закрепленной на стакане 4, установлены герконы 34, количество которых соответствует количеству
программируемых позиций резцедержателя 3.
Головка работает следующим образом. По команде от управления станком включается электродвигатель 7, передавая вращение валу 10, который приводит в движение
генератор волн. Установленные на эксцентричных шейках 9 ролики 8 вызывают волновые деформации гибкого колеса 11. Редуцирование чисел оборотов электродвигателя происходит вследствие разницы в количествах зубьев гибкого 11 и зубчатого 12 колес
(в данном случае разница составляет 2 зуба). Зубчатое колесо 12 сначала оказывается выходным звеном волнового редуктора, поскольку зубчатое колесо 13, сопряженное с гибким колесом 11, неподвижно, так как винт 5 находится в затянутом с гайкой 6 положении, а зубчатое колесо 12 имеет возможность свободного проворота на угол а (свободный проворот здесь понятие относительное, потому что при нем имеется определенное, но не существенное для препятстВИЯ процессу разгона электродвигателя 7 сопротивление в виде передвижения закрепленными на колесе 12 кулачками 26 плунжеров 27). Зубчатое колесо 12 проворачивается на угол а, и кулачок 26, перемещая плунжеры 27, упирается в стенку стакана 4. За это время двигатель 7 разгоняется до номинальной мощности. После этого начинает поворот зубчатое колесо 13, оказавшееся уже выходным звеном волнового редуктора, и передает свое вращение винту 5, который перемещает г-айку 6 и соединенный с ней
резцедержатель 3. Зубчатые полумуфты 2, одна из которых закреплена на резцедержателе 3, а другая - на корпусе 1, выходят из зацепления.
В момент, когда зубчатые полумуфты 2 еще не окончательно выщли из зацепления, палец 16 начинает входить, взаимодействуя со скощенными поверхностями, в отверстие 19 цанги 17. При полной расфиксации полу муфт 2 палец 16 входит в отверстие 19 на всю глубину. Величина перемещения рез- цедержателя 3 с гайкой 6 и соединенной с ней цангой 17 в направлении вращения за этот период соответствует размеру а. В этот момент расфиксация резцедержателя 3 зaвepUJaeтcя. Упор 15 вступает в контакт с торцом, цанги 17, и начинается принуди- тельный поворот резцедержателя. Посредством валика 30 он передает свое вращение поводку 31 с постоянным магнитом 32, который поочередно включает герконы 34. Па
лец 21 фиксатора 20 прощелкивает в пазы фиксаторного кольца 22, не препятствуя его повороту, так как проскальзывает по наклонной поверхности 24.
При достижении резцедержателем заданного положения, что фиксируется совпадением команды от устройства управления станком и ответа от герконного командо- аппарата, производится реверсирование электродвигателя 7. Весь цикл работы волнового редуктора повторяется в обратном направлении. Зубчатое колесо 13 и фланец 14 с закрепленным на нем упором 15 проворачиваются в обратную сторону. Палец 16 тянет за собой цангу 17, гайку 6, резцедержатель 3 и возвращает последний в заданное положение, если он произвел перебег этого положения под воздействием сил инерции. Усилие, которым производится обратный поворот резцедержателя, можно регулировать изменением вылета пальца 16. Подпружиненный палец 21 упирается в поверхность
18
23 фиксаторного кольца 22 и не дает резцедержателю возможность дальнейшего обратного поворота. Винт 5 продолжает вращаться, выводят палец 16 из отверстия 19 цанги 17. Резцедержатель 3 поверхностью 23 кольца 22 прижимается к пальцу 21 усилием, возрастающим по мере уменьщения расстояния между скошенными поверхностями отверстия 19. В дальнейшем это усилие становится равномерным, после чего уменьшается при выходе пальца 16 из цанги 17. Такое плавное поддержание резцедержателя в положении предварительной фиксации исключает его отскок при столкновении с пальцем 21. В этот момент зубчатые полумуфты 2 уже входят в зацепление, так как вращение винта 5 влечет за собой осевое передвижение гайки 6 и резцедержателя 3, происходит его зажим, при котором сила тока в обмотках электродвигателя 7 возрастает и его можно выключить с помощью реле максимального тока.
/4-х5
16
Г5
5- Б
фие. 2
а
И 16
Фиг. 3
S
J (pus. 4
(fluz. 5
28
27

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| Автоматическая револьверная головка | 1984 |
|
SU1175619A1 |
| Автоматическая револьверная головка металлорежущего станка | 1982 |
|
SU1065096A1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1967 |
|
SU201878A1 |
| Автоматическая револьверная головка | 1986 |
|
SU1393538A2 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 2007 |
|
RU2345869C1 |
| Автоматическая револьверная головка | 1985 |
|
SU1292930A1 |
| Автоматическая револьверная головка металлорежущего станка | 1985 |
|
SU1329918A1 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
