Изобретение относится к контроль- но-1-1змерительной технике и может быть использовано в процессе эксплуатации железнодорожного подвижного состава.
Целью изобретения является повышение производительности и точности измерений за счет одновременного автоматического контроля расположения колес на оси колесной пары.
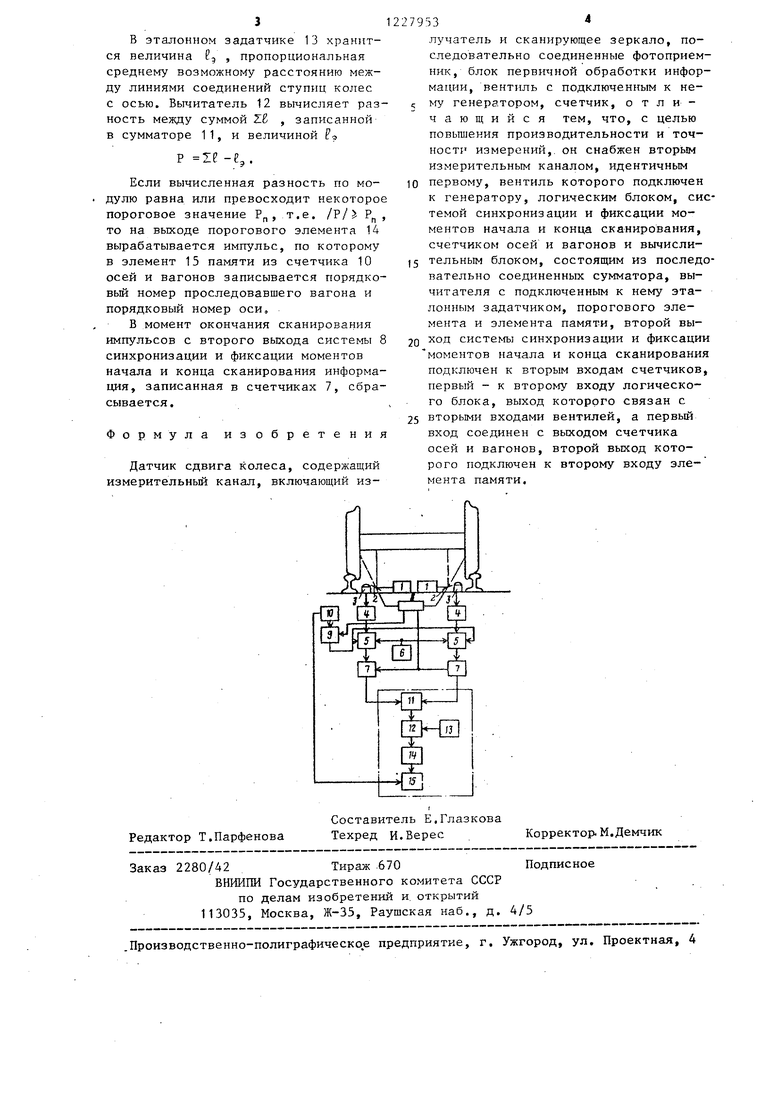
На чертеже представлена блок-схема датчика и показана установка его относительно контролируемой колесной пары. .
Датчик состоит из двух измерительных каналов, каждый из которых содержит излучатель 1, сканирующее зеркало 2, последовательно соединенные фотоприемник 3, блок 4 первичной обработки информации, вентиль 5, под- ключенньгй к генератору 6, и счетчик 7 системы 8 синхронизации и фиксации моментов начала и конца скалирования логического блока 9, счетчика 10 осей и вагонов и вычислительного блока, содержащего последовательно соединенные сумматор 11, вычитатель 12 с подключенным к нему эталонным за- датчиком 13, пороговый элемент 14 и элемент 15 памяти, второй выход системы 8 синхронизации подключен к вторым входам счетчиков 7, первьш - к второму входу логического блока 9, выход которого связан с вторыми входами вентилей 5, а первый вход соединен с выходом счетчика 10 осей и вагонов, второй выход которого подключен ко второму входу элемента 15 памяти.
Устройство работает следуюц сим образом.
При движении поезда оси колесных пар сканируются излучателями 1, Сканирование производится вдоль оси в направлении от мнимой точки, расположенной на поверхности оси, к колесу,Движущиеся колесные имеют возможность смещаться в направлении, перпендикулярном направлению движения поезда, В связи с этим мнимая точка должна располагаться на расстоянии, превышающем максимально возможные смещения торцовой плоскости ступиц колеса внутрь колеи. Момент начала сканирования фиксируется системой 8 синхронизации и фиксации моментов начала и конца сканирования, на первом выходе которой в момент начгзла сканирования вырабатывается импульсный сигнал, поступающий на второй вход логического блока 9. На первый вход логического блока 9 в моменты проследования осей поступают импульсы с первого вых:о,ца счетчика 10 осей и вагонов.
На выходе логического блока 9 вырабатывается сигнал 1 в том случае, если на его входы сначала пришел импульс с выхода счетчика 10 осей и вагонов, а затем импульс с первого выхода системы 8, В противоположном случае на выходе блока 9 установлен сигнал О.
Выход логического блока 9 подключен к .вторым входам вентилей 5, третий
вход которых подключен к выходу генератора 6, а первые входы - к выходам блоков 4 первичной обработки информа- 1щи, Таким образом, вентили 5 пропускают импульсы от генератора 6 в том
случае, если на выходах логического блока 9 и блока 4 первичной обработки информации присутствуют сигналы 1. Вход блока 4 первичной обработки информации подключен к. выходу фотоприемпика. 3, который воспринимает отраженное излучение сканирующего луча. Сканирование обеспечивают зеркала 2. При прохождении сканирующего луча вдоль оси на выходе блока 4 первич-
ной о€)работки информации формируется сиг нал 1, Совпадение во времени сигналов 1 на первом и втором входах вентиля 5 обеспечивает прохождения через него в счетчик 7 импульсов от генератора 6
В момент прохождения луча по линии соприкосновения колеса с осью интенсивность отраженного луча рез
ко падает, что приводит к формированию сигнала О на выходе блока 4 первичной обработки информации и закрыванию вентиля 5. Таким образом, промезкуток времени, в течение которого обеспечивается прохождение им- тгульсов через вентиль 5 в счетчик 7, пропорционален расстоянию от мнимой точки на оси до линии соприко снове- иия колеса с осью.
Выходы счетчиков 7 подключены к первому и второму входам сумматора 11 вычислительного блока, где производится вычисление расстояния между ко
значением и запись в элемент 15 памя- 55 ти порядкового номера неисправной колесной пары,
Ос уществляется это следующим образом,,
3
В эталонном задатчике 13 хранится величина f , пропорциональная среднему возможному расстоянию между линиями соединений ступиц колес с осью. Вычитатель 12 вычисляет разность между суммой Lt , записанной в сумматоре 11, и величиной fо
р ie -ЕЗ .
Если вычисленная разность по модулю равна или превосходит некоторое пороговое значение Р„, т.е. /Р/ Р , то на выходе порогового элемента 14 вырабатывается импульс, по которому в элемент 15 памяти из счетчика 10 осей и вагонов записывается порядко- вьй номер проследовавшего вагона и порядковый номер оси,
В момент окончания сканирования импульсов с второго выхода системы 8 синхронизации и фиксации моментов начала и конца сканирования информация, записанная в счетчиках 7, сбрасывается.
Формула изобретения
Датчик сдвига колеса, содержащий измерительньй канал, включающий из7953
лучатель и сканирующее зеркало, последовательно соединенные фотоприемник, блок первичной обработки информации, вентиль с подключенным к не,; fy генератором, счетчик, отличающийся тем, что, с целью повышения производительности и точности измерений, он снабжен вторым измерительным каналом, идентичным
0 первому, вентиль которого подключен к генератору, логическим блоком, системой синхронизации и фиксации моментов начала и конца сканирования, счетчиком осей и вагонов и вычисли5 тельным блоком, состоящим из последовательно соединенных сумматора, вы- читателя с подключенным к нему эталонным задатчиком, порогового элемента и элемента памяти, второй выQ ход системь синхронизации и фиксации моментов начала и конца сканирования подключен к вторым входам счетчиков, первый - к второму входу логического блока, выход которого связан с
5 вторыми входами вентилей, а первый вход соединен с выходом счетчика осей и вагонов, второй выход которого подключен к второму входу элемента памяти.
Редактор Т.Парфенова
Составитель Е.Глазкова Техред И.Верес
Заказ 2280/42Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и, открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор. М.Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАБЕГАНИЯ НА РЕЛЬС КОЛЕС ПОДВИЖНЫХ ЕДИНИЦ | 1999 |
|
RU2172267C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| Устройство для считывания и обработки графической информации | 1976 |
|
SU714433A1 |
| Устройство для измерения индикатрис рассеяния света | 1990 |
|
SU1723456A1 |
| Селектор букс по типу подшипника подвижного состава | 1974 |
|
SU749719A1 |
| СЕЛЕКТОР БУКС ПО ТИПУ ПОДШИПНИКА НА ПОДВИЖНОМ СОСТАВЕ | 1973 |
|
SU384716A1 |
| Оптический корреляционный координатор | 1973 |
|
SU443396A1 |
| Устройство для определения положения вагона на весах | 1976 |
|
SU605116A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано в процессе эксплуатации железнодорожного подвижного состава. Целью изобретения является . повышение производительности и точности измерений за счет одновременного автоматического контроля расположения колес на оси колесной пары.. При.этом сканирование проводится двумя системами от мнимой точки (расположенной на расстоянии, большем, чем возможное смещение колеса внутрь колеи и лежащей на оси) до колеса.Производится сравнение полученных значений с заданным расстоянием ЕЭ пропорциональным среднему возможному расстоянию между линиями соединений ступиц колес и осью. 1 ил. ю (Л с ю to со ел 00
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
