1
Изобретение относится к областям науки и техники, где ставится задача определения взаимного положения двух изображений с помощью корреляторов оптического типа, например, при автоматизации и контроле различных технологических процессов, в навигационных системах, устройствах вычислительной техники и т. д.
Известны устройства для управления движением различных объектов посредством корреляционной оценки сходства текущей траектории с желаемой (эталонной) траекторией.
В некоторых известных устройствах либо вовсе не производится определение углового рассогласования сравниваемых изображений при повороте их относительно друг друга вокруг оптической оси, либо используется сложное (двойное) эталонное изображение со специальной усложненной фотоэлектронной частью.
Известен оптический коррелятор, позволяющий определять угловое рассогласование сравниваемых изображений путем кругового сканирования простого по структуре эталонного изображения вокруг оптической оси коррелятора. Для осуществления сканирования эталонного изображения в нем применяется специальное электромеханическое устройство. Наличие в этом корреляторе подвижных механических частей обуславливает невысокое быстродейстЁие и сложность его конструкции. Неравномерность скорости сканирования эталонного изображения, обусловленное действием механических переменных сил, приводит к 5 дополнительной погрешности определения угловых координат. Целью изобретения является повышение точности и быстродействия путем использования электрического поворота изображения с применением генератора треугольного сигнала, схемы преобразования фор.мы сигнала, вентилей и катушек компенсации изменения масштаба.
Описываемый оптический корреляционный координатор позволяет, кроме определения
5 нлоскостных смещений г| и | сравниваемых изображений, вычислять угловое рассогласование 1J) путем непрерывного сканирования двухступенчатого колебания по круговой траектории) вокруг оптической оси исследуе0 мого изображения при неподвижном эталонном с помощью специального разработанного фотоэлектронного сканирующего устройства. Для определения рассогласований ц, |, используется устройство с поквадрантным про5 смотром корреляционного поля. Для повышения точности определения a|) разработан преобразователь с цифровым измерением временного интервала. На фиг. I изображена блок-схема оптиче0 ского корреляционного координатора; на
фиг. 2 - функциональная схема оптического корреляционного координатора; на фиг. 3 - диаграммы, ноясняющие принцин вращения и компенсации масштаба анализируемого изображения; на фиг. 4 - функциональная схема оптико-электронной части оптического координатора; на фиг. 5 - временные диаграммы, поясняющие работу координатора при определении угла поворота -ф.
Предлагаемый координатор содержит объектив 1, электронно-оптический преобразователь (ЭОП) 2 (ЭОП с разработанной системой сканирования анализируемого изображения является также составной частью фотоэлектронного сканирующего устройства), линзу 3, карту эталонного изображения ЭК 4, конденсор 5, блок фотоумножителей 6 со светоделительной головкой, сумматор 7, схему 8 формирования импульсов максимума, сумматоры 9-12, схему управления 13, время - импульсный преобразователь 14, кольцевую линзу вращения 15 изображения, катущки 16 конпенсации изменения масщтаба, электронный канал сканирования 17, электронный блок компенсации изменения масщтаба ана.чизируемого изображения 18, блок 19 формирования тактовых импульсов, схему совпадения 20, задающий генератор 21, триггеры 22 п 23, генератор 24 треугольных напряжений, вентиль 25, усилитель мощности 26 канала сканирования 17, вентиль 27, схему преобразования формы сигнала 28, усилитель мощности 29, триггер 30 управления, вентили 31-37, счетчик 38, одновибраторы 39, генераторы 40 и 41, схему 42 формирования импульсов такта, схему 43 формирования опорного импульса, схему 44 согласования (уменьщения) напряжения и вентиль 45.
В оптическом корреляционном координаторе (см. фиг. 1) изображение анализируемого образа, например, текущей траектории двил ения объекта, проектируется с помощью объектива I на фотокатод ЭОП 2, расположенный в фокальной плоскости объектива. С помощью ЭОП осуществляется преобразование оптического изображения в электронное и после усиления по яркости производится его воспроизведение на выходном экране ЭОП. Далее в оптическом координаторе сравнивается анализируемое изображение с эталонным. Лучи, прошедщие через эталонное изображение, собираются конденсором 5 в одно световое пятно в так называемой плоскости корреляции. Линза 3 позволяет просто подбирать масщтаб анализируемого изображении в плоскости расположения ЭК.
Плоскостные смещения ц н определяются также, как и в известных устройствах с поквадратным просмотром корреляционного поля путем суммирования по полуплоскостям корреляционного поля фототоков с соответствующих квадратов в сумматорах 9-12 и последующего вычитания сумм.
Суммированные фототоки снимаются с блока фотоумножителей 6, состоящего из световодной делительной головки, расчленяющей сформированное оптической частью координатора световое пятно на части, лежащие в различных квадрантах корреляционного поля, и 5 четырех ФЭУ-64, воспринимающих разные части пятна.
При угловом рассогласовании гЬ двух сравниваемых изображений вокруг оптической оси пятно изменяет свою яркость, причем при
10 o яркость максимальная. (Это последнее свойство используется для определения текущих угловых рассогласований). Для определения углового рассогласования г); координатор осуществляет два режима работы: поиск,
15 когда величина |)5°, и слежение, когда г|);5°, и производится отслеживание в небольщом угловом диапазоне ее изменений. При этом определение -ф в двух режимах работы координатора производится в процессе непре20 рывного сканирования (колебания по круговой траектории) вокруг оптической оси анализируемого изображения при неподвижном эталонном изображении. Сканирование сложного по. структуре анализируемого оптического изображения в двух режимах работы координатора производится фотоэлектронным сканирующим устройством, которое состоит из ЭОП 2 (см. фиг. 1), короткой кольцевой линзы вращения 15, двух
0 катущек 16 компенсации изменения масщтаба анализируемого изображения, электронного канала сканирования 17, блока компенсации изменения масщтаба анализируемого изображения 18 и блока 19 формирования тактовых 5 импульсов.
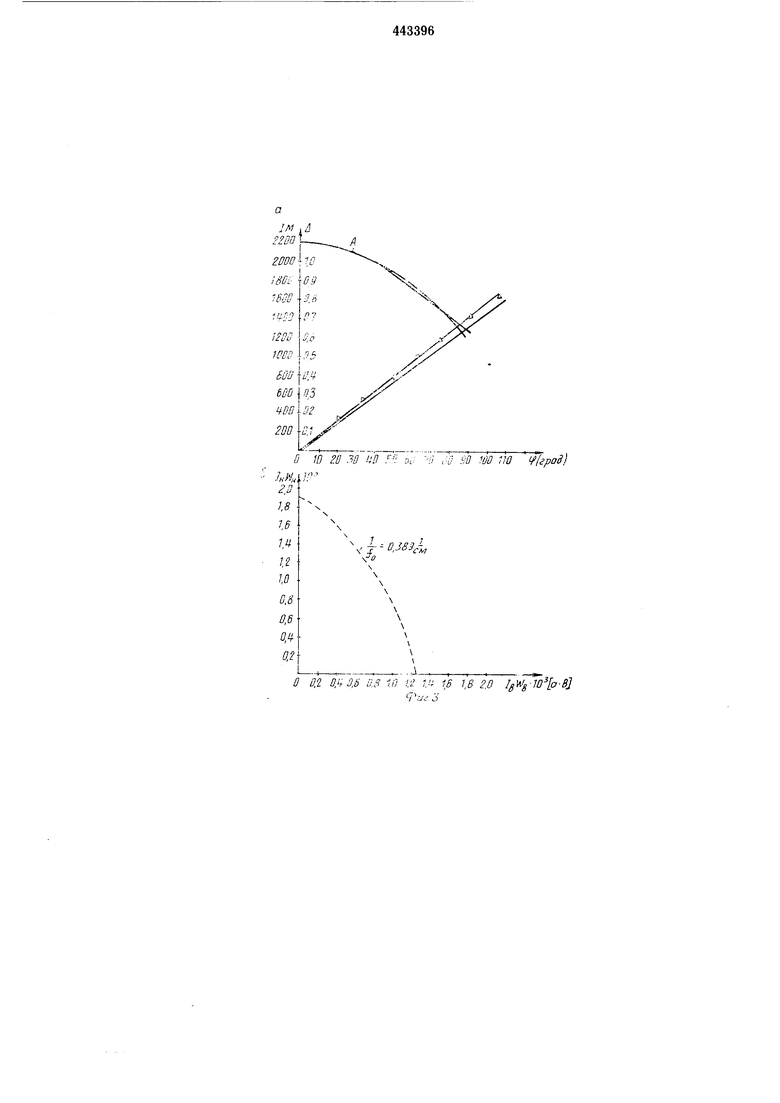
Известно, что аксиально-симметричное поле короткой магнитной линзы обладает собирательными фокусирующими свойствами и создает изображение предмета, повернутое на некоторый угол ф. Величина угла поворота ф изображения пропорциональна ампервиткам линзы и зависимость ф /(/ь№ь) имеет липейный характер (см. фиг. 3,а), где экспериментальные точки отмечены треугольничками. В этом связи для осуществления сканирования (колебания по круговой траектории) анализируемого изображения относительно пенодвижного эталонного изображения изменяется во
0 времени ток в линзе, выполненной в виде цилиндрической катущки без магнитопровода, по треугольному закону.
Изменение ампер-витков катущки вращения вызывает изменение фокусирующих свойств
5 электронно-оптической системы в целом, что приводит к уменьщению размеров анализируемого изображения на выходном экране ЭОП при увеличении тока в катушке (см. фиг. 3,а, зависимость А). Однако относитель0 пое изменение масщтаба Д изображения при повороте на угол ±5° является незначительным и не превыщает 0,1%, что позволяет осуществлять сканирование (вращение по колебательной траектории) анализируемого изображения при работе координатора в режиме
«слежения без дополнительной компенсации масштаба изображения.
В режиме поиска в процессе сканирования (двухстепенного колебания траектории) в угловом диапазоне ±180° осуществляется компенсация изменения масштаба анализируемого изображения с помош,ью двух расположенных вблизи друг от друга катушек с противоположным направлением тока в них. При равенстве ампер-витков компенсируюш,их катушек такая система не вызывает поворот электронного изображения в ЭОП.
При сканировании анализируемого изображения в катушках компенсации масштаба изображения необходимо подобрать такое изменение тока, чтобы общее фокусное расстояние всей электронно-оптической системы ЭОП, включая линзу вращения, оставалось постоянным. На фиг. 3,6 приведена экспериментальная зависимость ампер-витков IkW катушек компенсации изменения масштаба изображения от ампер-витков поворотной линзы для постоянного фокусного расстояния электронно-оптической системы. Эта зависимость и определяет закон изменения тока в компенсирующих катущках при сканировании. При этом ток в катушках 6 компенсации должен изменяться во времени в противофазе по отношению к току в линзе вращения 15. В режиме «поиск схема управления 13 осуществляет коммутацию питания на электронный канал сканирования 17 и блок компенсации изменения масштаба анализируемого изображения 18 фотоэлектронного сканирующего устройства. В электронном канале сканирования вырабатывается ток треугольной формы, поступающий на короткую кольцевую линзу вращения 15, с помощью которой на выходном экране ЭОП анализируемое изображение соверщает двухстепные колебания вокруг оптической оси в угловом диапазоне - 180°. Одновременно в блоке компенсации масщтаба изображения генерируются ток специальной формы, поступающий на катущки 16, чем исключается изменение масштаба анализируемого изображения в режиме «поиск.
В режиме «поиск при сканировании анализируемого изображения относительно неподвижной эталонной карты световое пятно на входе блока фотоумножителей 6 изменяет свою яркость. С выхода сумматора 7, производящего суммирование фототоков со всех четырех квадрантов корреляционного поля, на вход схемы 8 формирования импульсов поступают сигналы, пропорциональные функции взаимной корреляции и имеющие резко выраженный максимум. При этом время появления максимума сигналов определяется моментом полного совпадения анализируемого изображения и эталонного.
По месту расположения максимума данного сигнала за время периода одного крутильного колебания анализируемого изображения можно определить величину и знак -ф, если пространственное положение оси коррелятора, принятое за начало отсчета , жестко связать с серединой периода сканирования.
Привязка оси координатора, принятая за начало отсчета ij), осуществляется в блоке 19 формирования тактовых импульсов простой электронной схемой посредством двойного дифференцирования тока (папрян ения) треугольной формы, одновременно поступающего с электронного капала скаппрования 17 на
блок 19 и лгхнзу вращения 15. В блоке 19 формируются короткие импульсы с большой крутизной переднего фронта, фиксирующие во времени концы угла сканирования анализируемого изображения (импульсы такта) и середину тактового интервала (опорный импульс), которые поступают на время-импульсный преобразователь 14. Из время-импульсного преобразователя поступают короткие импульсы, фиксирующие во времени момент совпадения сравниваемых изображений (импульсы максимума) со схемы 8 формирования импульса максимума. Формирование импульса максимума в этой схеме осуществляется путем усиления ограничения и двойного дифференцирования входного сигнала. В преобразователе 14 производится измерение временного интервала между импульсом такта и импульсом максимума посредством его высокочастотного заполнения и последующего просчета, тем самым определяется величина -ф. (В преобразователе 14 также предусмотрено определение знака углового рассогласования г|:).
После определения углового рассогласования высокочастотная последовательность импульсов, число которых пропорционально значению ср, поступает па схему индикации и исполнительные органы, в качестве которых могут быть использованы, например, шаговые двигатели.
Исполнительные двигатели отрабатывают рассогласование, либо поворачивая эталонное изображение, либо платформу координатора. В момент, когда i|- станет близким к пулю, сигналы со схемы 8 формирования импульсов
максимума, подаваемые на схему управления 13, заставляют ее сработать так, что координатор переводится в режим «слежения.
При этом схема управления 13 в фотоэлектронном сканирующем устройстве отключает
блок компенсации изменения масштаба анализируемого изображения 18 и уменьшает амплитуду тока треугольной формы в этом блоке, которым запитывается линза вращения 15, так чтобы сканирование (колебапие) анализируемого изображения производилось в угловом диапазоне ±5°.
Схема 8 формирования импульсов максимума формирует импульсы (подобно выщеописанному), точно фиксируя моменты совпадения сравниваемых изображений, и посылает их на вход время-импульсного преобразователя 14, куда поступают с блока 19 импульсы такта и опорные импульсы. При этом как и в режиме «поиска, величнпа и знак ij) определяются местоположением импульса максимума относительно середины тактового интервала. Точность определения а1з в режиме «слежения выше, чем в режиме «поиск. Это объясняется тем, что в режиме «слежения частота высокочастотного заполнения при измерении временного интервала выше, чем в режиме «ноиск. В то же время частота сканирования в этом режиме остается прежней, что и при работе коррелятора в режиме «поиск. Схема управления 13 (см. фиг. 2) состоит из схемы совпадения 20, задающего генератора 21 и двух триггеров 22 и 23. В режиме «поиск задаюш,ий генератор 21 запускает генератор 24 треугольных напряжений канала сканирования 17 исследуемого изображения. Напряжение с генератора 24 через вентиль 25, управляемый триггером 22 с раздельным входом, и усилитель мош,ности 26 подается на магнитную линзу врашения 15 (на фиг. 5,а показана форма тока /i с усилителя мощности 26), в результате чего анализируемое изображение совершает крутильные колебания на выходном экране ЭОП вокруг продольной оси в угловом диапазоне ±180°. Для компенсации изменения масштаба анализируемого изображения треугольное напряжение с выхода генератора нодается через вентиль 27, унравляемый триггером 22, на схему преобразования формы сигнала 28, где преобразуется в сигнал, и через усилитель мощности 29 подается на встречно включенные катушки 16 (на фиг. 5,а показана форма тока Ig, поступающего на катушки компенсации). Световой поток, определяемый взаимной угловой ориентацией анализируемого и эталонного изображения, нреобразуется в электрические сигналы с помощью блока фотоумножителей 6 и после их суммирования в сумматоре 7 поступает на схему 8 формирования импульсов максимума. Импульс максимума, соответствующий а|) О, с выхода схемы 8 поступает на схему времяимпульсного преобразователя 14, состоящего из триггера 30 управления вентилей 31-37, счетчика 38 импульсов, одного одновибратора 39 знака и генераторов 40 и 41. Напряжение треугольной формы с выхода генератора 24 также поступает на блок 19 формирования тактовых импульсов, состоящий из схемы 42 формирования импульсов такта и схемы 43 формирования опорного импульса. Сформированные тактовые импульсы Ti и ГЕ посредством двойного дифференцирования напряжения с генератора 24, фиксирующие концы углового диапазона сканирования исследуемого изображения в схеме 42 (см. фиг. 5,а, f/т), поступают на время-импульсный преобразователь 14. Следует отметить, что При применении в координаторе фотоэлектронного сканирующего устройства, блок формирования тактовых импульсов существенно упрощается. Сформированный опорный импульс с выхода схемы 43 (см. фиг. 5,а, По), фиксирующий во времени ось координатора, принятую за начала отсчета, поступает на схему совпадения 20 и вентиль 36 преобразователя 14. В режиме «поиск триггер 22 схемы управления 13 находится в таком состоянии, что вентили 25, 27 и 31 открыты, и высокочастотные импульсы с генератора 40 через вентиль 31 поступают на вход вентиля 33. Тактовые импульсы Г) и TZ также поступают на вход триггера 23 схемы управления 13, причем при поступлении импульса Ti перепад напряжения с триггера 23 открывает вентиль 33. Одновременно тактовый импульс TI проходит на вход триггера 30 преобразователя 14, который открывает вентиль 34. При этом высокочастотная последовательность имцульсов через вентили 33 и 34 поступает на один из входов счетчика 38. Процесс счета продолжается до тех пор, пока поступающий со схемы 8 импульс максимума не перебрасывает триггер 30 (см. фиг. 5,а, t/зо), который закрывает вентиль 34 и открывает вентиль 35 вычитания. Вычитание в счетчике продолжается до момента прихода импульса TZ на вход триггеров 23 и 30. При поступлении импульса TZ перепад напряжения с триггера 23 закрывает вентиль 33, а с триггера 30 - закрывает вентиль 35 и открывает вентиль 34. При этом число импульсов, накопленных в счетчике 38 после вычитания (см. фиг. 5,а, Uss) за ноловину периода сканирования (), ОПределяет величину углового рассогласования г|;. Знак -ф определяется в следующей последовательности. Опорный импульс «О поступает через вентиль 36, который в первый полупериод сканирования открыт перепадом напряжения с триггера 23 на вход вентиля 37. Вентиль 37 управляется триггером 30, причем, например, для положительного рассогласования (импульс максимума находится слева от опорного) вентиль 37 открыт, и импульс «О запускает одновибратор 39, постоянная времени которого равна 1,5 полупериодам сканирования (см. фи-г. 5,а, Usfi). С выхода одновибратора 39 снимается положительное напряжение, определяющее знак ф. При отрицательном рассогласовании г|- вентиль 37 закрыт, и с выхода одновибратора 39 снимается отрицательное напряжение. Во второй полупериод сканирования (Tz-Tl) производится считывание содержимого счетчика 38, пропорциональное величине г|з, и обработка углового рассогласования исполнительными элементами с учетом знака ф. В этом случае вентиль 36 закрыт, и онорный импульс не поступает на вход одновибратора 39. После отработки в момент, когда ) станет близким к нулю, схема совпадения 20 из общей схемы управления 13, на вход которой поступают импульсы максимума и опорный, срабатывает. Импульс совпадения с выхода схемы совпадения 20 переворачивает триггер 22, который за-крывает вентили 25, 27 и 31 и открывает вентили 45 и 32. При этом отключается блок компенсации изменения масштаба анализируемого изображения 18 и подключается генератор, а электронный канал сканирования 17 исследуемого изображения переходит в режим, при котором напряжение с генератора 24 через вентиль 45 подается на схему 44 согласования (уменьшения) напряжения по амплитуде. Это уменьшенное напряжение через усилитель мопдности 26 поступает на магнитную линзу враш,ения 15, в результате которого исследуемое изображение сканируется уже в угловом диапазоне ±5°.
Определение величины и знака углового рассогласования и отработка i|j в режиме «слежение такое же, что и в режиме «поиск (см. фиг. 5, б, в, случаи, когда и ).
Экспериментальные исследования макета оптического коррелятора показали, что при частоте сканирования анализируемого изображения 200 ГЦ погрешность определения угла поворота о)) не превышает 25°. Выбор верхней граничной частоты сканирования в основном определяется постоянной времени, после свечения экрана электронно-оптического преобразователя и может быть сделана достаточно высокой при использовании ЭОП с малым послесвечением экрана.
Таким образом, разработанный вариант оптического координатора для определения взаимного положения двух сравниваемых изображений позволяет при неподвижном простом (одинарном) эталонном изображении с высокой точностью определять угол поворота изображений г)) вокруг оптической оси системы при одновременном увеличении быстродействия и упрошения его конструкции.
Предмет изобретения
1. Оптический корреляционный координатор, выполненный в видепоследовательно размеш;енных на одной оптической оси объектива электронно-оптического преобразователя с установленной на нем кольцевой линзой вращения в виде цилиндрической катушки без магнитопровода, подключенной к первому усилителю мощности, карты эталонного изображения, светоделительной головки с блоком из четырех фотоумножителей и содержащий четыре сумматора, подключенные входами к выходам фотоумножителей соответственно, а выходами - Попарно к схемам вычитания, дополнительный сумматор, соединенный с выходами фотоумножителей и подключенный к схеме формирования импульсов максимума, второй усилитель мошности, задающий генератор, схему управления и время-импульсный преобразователь, отличающийся тем, что, с целью повышения быстродействия и точности, координатор содержит две встречно включенные катушки компенсации изменения
масштаба, генератор треугольного напряжения, три вентиля, схему согласования напряжения, схему преобразования формы сигнала, причем управляющие входы трех вентилей подключены к соответствующим выходам схемы управления, а их информационные входы - к генератору треугольного напряжения, соединенного с задающим генератором, выход лервого вентиля непосредственно, а выход второго вентиля через схему согласования напряжения соединены с первым усилителем мощности, выход третьего вентиля через схему преобразования формы сигнала и второй усилитель мощности подключены к катущкам компенсации изменения масштаба.
2. Координатор по п. 1, отличающийся тем, что в нем время-импульсный преобразователь содержит триггер управления, генераторы высокочастотных импульсов, подключенные через первый и -второй вентили соответственно к третьему вентилю, подключенному соответственно к одному из входов четвертого и пятого вентилей, вторые входы которых соединены с соответствующими выходами триггера управления, а выходы подключены к счетчику, одновибратор, подключенный через шестой и седьмой вентили ко входам время-импульсного преобразователя, другие входы которого соединены с управляющими входами первого, второго и третьего вентилей, а управляющий вход седьмого вентиля подключен к триггеру управления.




| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР1 БИ6/: | 1972 |
|
SU328479A1 |
| Устройство для измерения параметров движения объекта | 1987 |
|
SU1511692A1 |
| Устройство для измерения параметров движения объекта | 1987 |
|
SU1422160A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |
| СПОСОБ ОРИЕНТИРОВКИ ОПТИЧЕСКОГО КОРРЕЛЯТОРА | 1970 |
|
SU260210A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| Устройство для кодирования изображений объектов | 1989 |
|
SU1691856A1 |
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |
| Оптический коррелятор | 1980 |
|
SU902035A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР ДЛЯ ОПРЕДЕЛЕНИЯ РАССОГЛАСОВАНИЯ | 1971 |
|
SU305493A1 |


WES -,73
)
бйи I/-;4
dSD из ifDB.D2
D Ю го 30 ua .У ou -o r// so wo lo fffepoS
JKJH,
20,8 IB 1,4
12 w
0.8 0,6 0,40,2
0 0,2 0, 0,6 0.8 lii 1.2 4 16 1,6 2.0 gWg-W a-8
D,3B3,
- . .
а
I,
т Vo
/53 33
