Изобретение относится к технике бурения геологоразведочных скважин, а именно к направленному бурениЮд и предназначено для отклонителей с мнгократным ориентированием в цикле искривления,
Цель изобретения повышение надежности ориентирования.
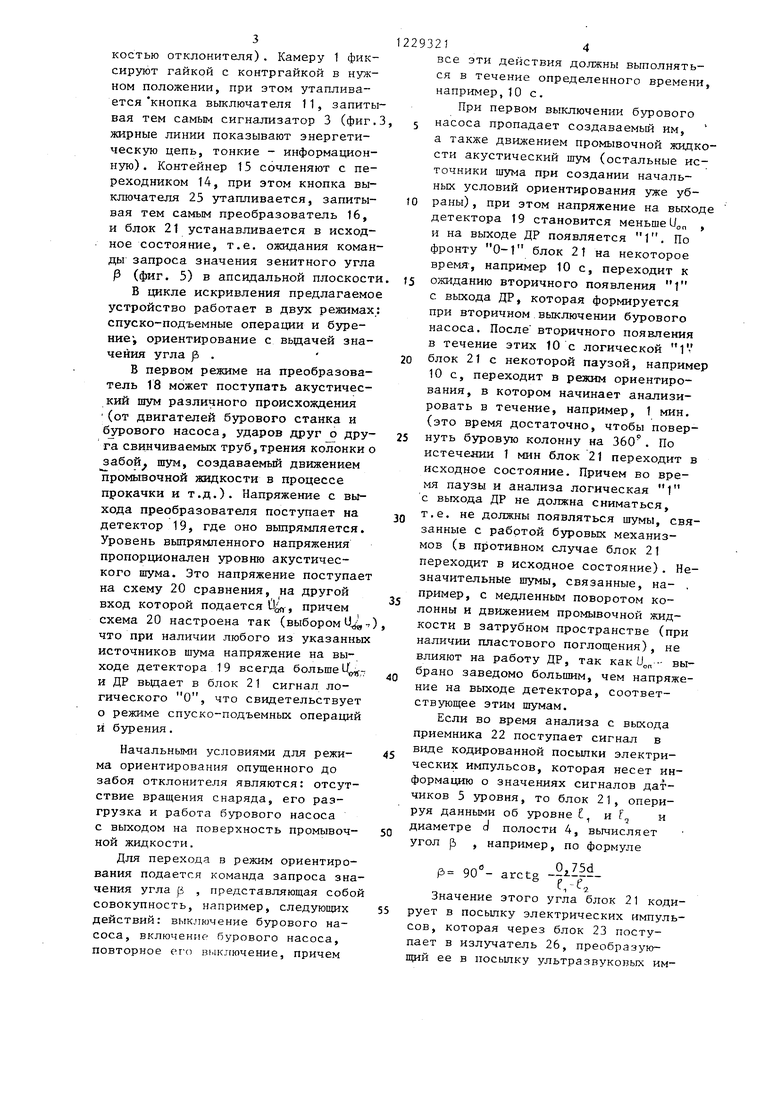
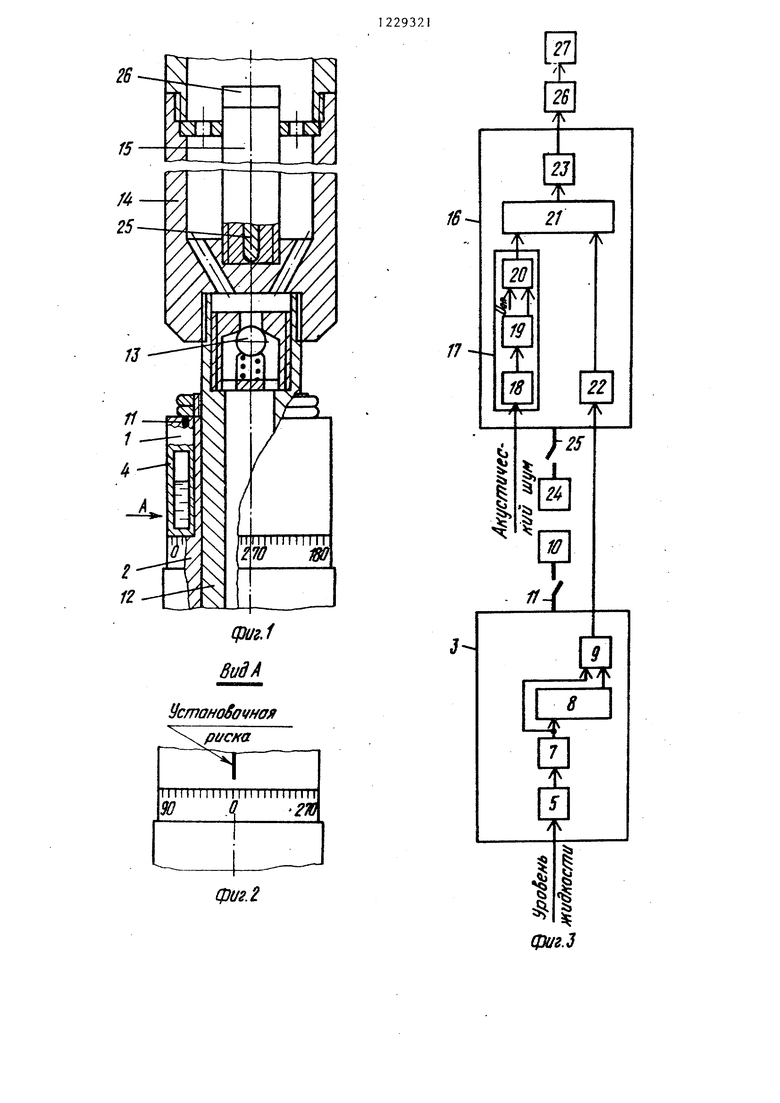
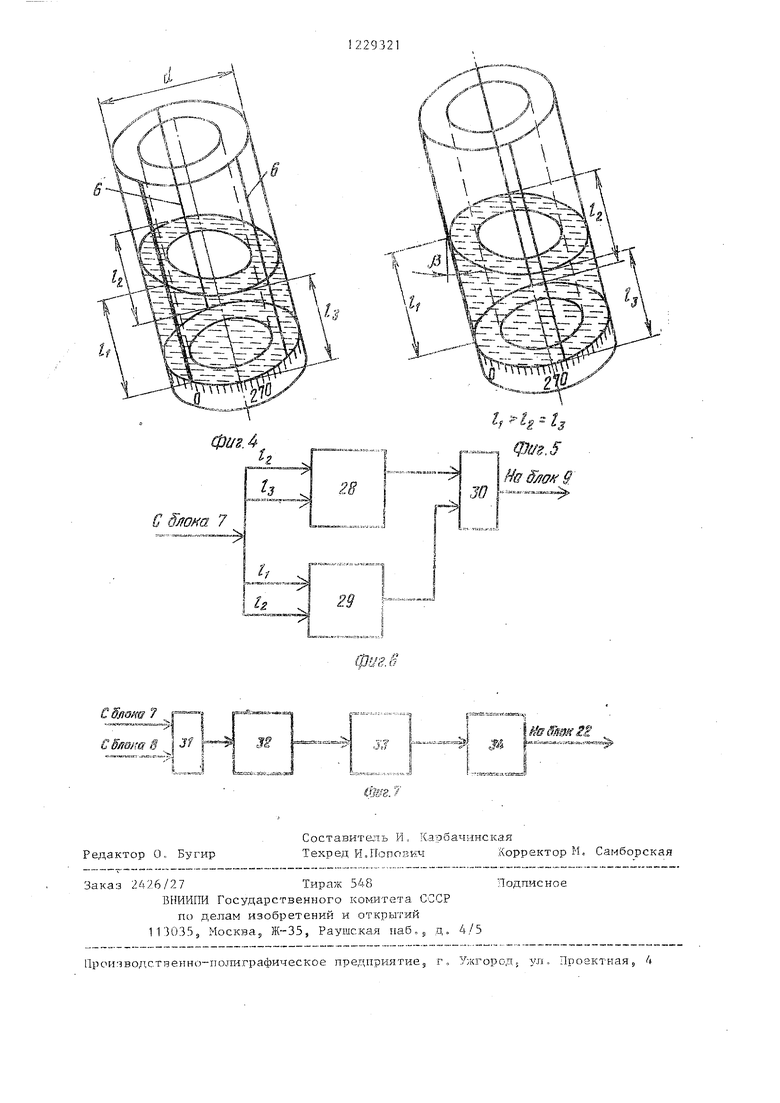
На фиг, 1 показано предлагаемое устройствоS общий вид в разрезе5 на фиг, 2 - вид А на фиг, 1; на фиг. 3 - структурная злектрическая схема устройства, на фиг, 4 - кольцевая полость с жидкостью в положе- нии перед ориентированием, на фиг,5 то же, после ориентирования; на фиг.6 - блок сравнения сигналов датчиков уровня, на фиг. 7 - управляемый генератор радиоимпульсов
Устройство содержит (фиг. 1) кам ру 15 имеющую возможность поворота и фиксации относительно корпуса 2. На цилиндрической части корпусаj , примыкающей к нижнему торцу камеры 15 нанесена круговая угломерная шкала делений, например, через 5°. На наружной поверхности камеры 1 нанесена продольная риска (фиг.2) а внутри камеры расположен сигнализатор 3 положения отклонителя (СПО) выполненньш в виде герметичной кольцевой полости 4, частично заполненной жидкостью, например электропро- воднойS имеющей возможность взаимодействия с датчиками 5 уровняj напр мер, реохордного типа, причем реохорды 6 расположены по образующей в полости 4 через 120 по окружности. Один из реохордов, условно на-- зываемый нулевым (на фиг. 4 и 5 вы- делен жирной линией) строго центрирован относительно установочной риски. Выходы датчиков 5 подключены к расположенным вне полости 4 входам аналого-цифрового преобразова- теля (АЦП) 7, выходы которого соединены с блоком 8 сравнения сигналов датчиков уровня и одним из вхо-- дов управляемого генератора 9 радиоимпульсов р другой вход послед- него подключен к выходу блока 8. СП подключен к расположенному в камере 1 автономному источнику 10 питания через выключатель 11.
Внутри вала 12 отклонителя уста- новлен подпружиненный 1слапан 13 (например, шариковый). На верхней части вала 12 укреплен переходник
14 с каналб-ми для прохода ripoNibiBO4- ной ж удкостИ; сообщающимися с цент- ралькь&1 каналом зала 12. Внутри пере- ходнк:ка закреплен контейнер 15 с размещенньм в нем управляемым пре- обраговатеяам 15;. состоящим из да. режима работы бурового сиа ряда (,ДР) М . включающего акусто- злектрический преобразователь 18, детектор 19 и схему 20 сравнения,, вь;хо1 KOToj Oro лодсоединен к ло гкчесЕОму блоку 21,, выполненному на основе ыикрокомпрессора, К другому входу блока 21 подсоединен приемник 22 радиоимпульсов с цифровым выходом о Выход блока 21 связан с блоком 23 управлени51 аку- стичес;ки.м излучателем сигнала значе ник угла. В контейнере расположен такж€ автономный источник 24 питания, подю1юченкьп1 через выкаюча- тель 25 ic упразляемоь5у преобра- зоватсшю 16 На верхнем торце контейнера укреплен акустический излучатель 26 (например, пьезокера- мического типа диагч етром 30 мм) , электрически соединенный с блоком 23 и имеющ ш прямой выход в гидравлический канал бурильньЕХ труб.
Приемник 22 связан с генератором 9 по радиоканалу че1эез стенки камеры 4, корпз -с 2,, вал 12 переход- кик 14 и стенку 15 контейнера.
Переходник соединен с колонной, собранной из труб с постоянньм внутренним сечением (например,, труб ССК) . На пове.рхностр внутри ведутцей трубы, па неподвижной части вертлюга-саль- нкка смонтирован акустический приемник 27 (например, пьезокерамичес- кого i -ипа) Блок 8 сравнения сигналов д.атчиков уровня (фиг. 6) может быть вьп1олнен9 например, в вид;е двух схем 28 и 29 сравнения и элемента И 305 а :лгргвляемый генератор 9 ра- диоимпульссв - )з виде последоза- тельн -) соедЕ1не 1пьк Э1(емента И 31, шифратора 52, ииротно-импульо-шго модул;чтора 33 и генераторе 34 несуШ,еЙ 4i.CTOTb;,
Устройстве работает следуюишм образом,,
3 соответствии с заданием на ис- кр1:шлс:ние камеру устанавливают риской (фиг.2) против соответствующего значения угла на угломерной шв;але (этот угол является углом межэду апсида,пьной плоскостью и плоскостью отклонителя). Камеру 1 фиксируют гайкой с контргайкой в нужном положении, при этом утапливается кнопка выключателя 11, запиты вая тем самым сигнализатор 3 (фиг. жирные линии показывают энергетическую цепь, тонкие - информационную) . Контейнер 15 сочленяют с переходником 14, при этом кнопка выключателя 25 утапливается, запиты- вая тем самым преобразователь 16, и блок 21 устанавливается в исходное состояние, т.е. ожидания команды запроса значения зенитного угла р (фиг. 5) в апсидальной плоскост
В цикле искривления предлагаемо устройство работает в явух режимах спуско-подъемные операции и бурение; ориентирование с вьщачей значения угла р .
В первом режиме на преобразователь 18 может поступать акустический шум различного происхоявдения (от двигателей бурового станка и бурового насоса, ударов друг ДРУ- га свинчиваемых труб, трения колонки о забой, шум, создаваемый движением промывочной жидкости в процессе прокачки и т.д.). Напряжение с выхода преобразователя поступает на детектор 19, где оно выпрямляется. Уровень выпрямпенного напряжения пропорционален уровню акустического шума. Это напряжение поступает на схему 20 сравнения, на другой вход которой подается ц , причем схема 20 настроена так (выбором при наличии любого из указанных источников шума напряжение на выходе детектора 1 9 всегда больше 14ц--; и ДР вьщает в блок 21 сигнал логического О, что сврадетельствует о режиме спуско-подъемных операций и бурения.
Начальными условиями для режима ориентирования опущенного до забоя отклонителя являются: отсутствие вращения снаряда, его разгрузка и работа бурового насоса с выходом на поверхность промывочной жидкости.
Для перехода в режим ориентирования подается команда запроса значения угла р , представляющая собой совокупность, например, следующих действий: выключение бурового насоса, включение бурового насоса, повторное ег о выктгючение, причем
12293214
все эти действия должны выполняться в течение определенного времени, например,10 с.
При первом выключении бурового 5 насоса пропадает создаваемый им,
а также движением промывочной жидкости акустический шум (остальные источники шума при создании начальных условий ориентирования уже уб- 10 раны), при этом напряжение на выходе детектора 19 становится меньше U , и на выходе ДР появляется 1. По фронту 0-1 блок 21 на некоторое время, например 10 с, переходит к 5 ожиданию вторичного появления 1 с выхода ДР, которая формируется при вторичном вьжлючении бурового насоса. После вторичного появления в течение этих 10 с логической lV 20 блок 21 с некоторой паузой, например 10 с, переходит в режим ориентирования, в котором начинает анализировать в течение, например, 1 мин. (это время достаточно, чтобы повер- 25 нуть буровую колонну на 360°. По истечении 1 мин блок 21 переходит в исходное состояние. Причем во время паузы и анализа логическая 1 с выхода ДР не должна сниматься, jg т.е. не должны появляться шумы, связанные с работой буровых механизмов (в противном случае блок 21 переходит в исходное состояние). Незначительные шумы, связанные, на- . пример, с медленным поворотом колонны и движением промывочной жидкости в затрубном пространстве (при наличии пластового поглощения), не влияют на работу ДР, так как и„„ выбрано заведомо большим, чем напряжение на выходе детектора, соответствующее этим шумам.
Если во время анализа с выхода приемника 22 поступает сигнал в виде кодированной посыпки электри35
40
0
45
ческих импульсов, которая несет информацию о значениях сигналов датчиков 5 уровня, то блок 21, оперируя данными об уровне , и f и диаметре d полости 4, вычисляет угол р, , например, по формуле
13 arctg -5-Z5d
Значение этого угла блок 21 коди- 5 рует в посылку электрических импульсов, которая через блок 23 поступает в излучатель 26, преобразующий ее в посыпку ультразвуковых импульсов, несущая частота которых выбрана из условия оптимального прохождения сигналов, например 100 кГц
Сигнал на выходе приемника 22 вырабатывается при поступлении радиоимпульсов с СПО 3, который работает следующим образом. Цифровые сигналы с датчиков 5 уровня после АЦП 7 поступают на генератор 9 и блов: 8 сравнения, При этом последний постоянно анализирует соотношение сигналов с датчиков уровня. Если: условие f, fJ РЗ не выполняется (фиг.4, нулевой реохорд датчика уровня не находится в апсидальной плоскости, так как отклонитель не сориентирован) , то с блока 8 на генератор 9 поступает запрещающий сигнал и генератор не вырабатьтает радиоимпульсов, Если же (фиг.5) условие Е , f - р вьшолйяется (что свидетелствует о факте ориентирования, т.е. нулевой цеохорд находится в апсид ал ной плоскости), то с блока 8 поступает разрешающий сигнал на генератор 9 и последний преобразует 1щф- ровое значение сигналов с АЦП в последовательность радиоимпульсов.
В режиме ориентирования оператор ожидает появления сигнала значения величины угла р (являющегося одновременно и сигналом ориентирования) отмечаемого на индикаторе приемника сигнала, находящегося на буровой. Если после начала режима ориентирования указанный сигнал не поступает (т.е. нулевой реохорд не находится в апсидальной плоскости)g то оператор медленно поворачивает разгру кенн ю буровую колонну, следя при этом за показаниями индикатора. При появлении сигнала поворот прекращают После этого корпус откло- нител:я: известными мeтoдalvIи закрепляют Б сквазь:ине и начинают бурение.
Для опаратиЕногс контроля работы отклокрЕтеля команду запроса значения величины yriia р периодически (например,, через 20-50 см бурения) - иовторя:ют. Если сигнал не поступает (Т.Ё;. отклонитель отошел от
линии своего действия), то описанной операцией проводят коррекцию положения отклонителя.
Каналом связи, соединяющим забой с поверкностью5 является столб прО1Ф1вочнай гшдкости постоянного сечения (так как используются гладкоствольные изнутри трубы) 3 по .которому распространяются ультразвуковые колебания.
После остановки насоса приемник продолжает оставаться в контакте с жидкостью в течение опред&пенного
времеки, досо: аточного для приема сигнала с изл:г-1ателя9 благодаря нали- ггаю подз1ру;йиненного клапана 13.
Применение предлагаемого устройства позволяет повысить надежность
вьшедения скважины в заданное направление за счет получения дополнительной информации о наборе кривизны в апсидальной плоскости.
28
26
лч
2J
1621
/ь
20
11
19
18
/
М
2
.§
10
«1
Устано$о ная
Г
pi/ска
IllllH II mill ПТТТТТТТТ
Ю .((
r±D
Фи2.2
Т
h§
фиг.З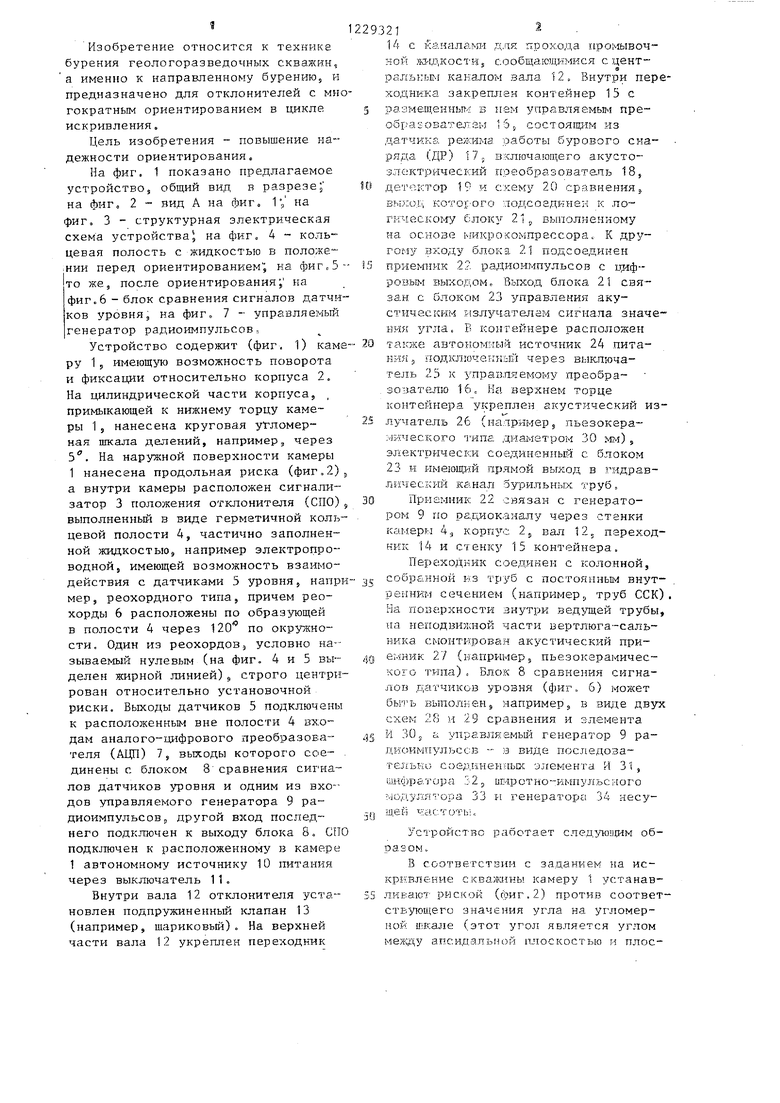
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентирования отклонения в скважине | 1982 |
|
SU1102917A1 |
| Керноориентатор многократного действия | 1983 |
|
SU1154432A1 |
| Керноориентатор многократного действия | 1981 |
|
SU1104238A1 |
| Устройство ориентирования отклонителя в скважине | 1989 |
|
SU1682545A1 |
| Устройство для измерения параметров искривления скважины и положения отклонителя | 1984 |
|
SU1161698A1 |
| Устройство для направленного бурения | 1987 |
|
SU1521847A1 |
| Устройство для ориентирования отклонителя в наклонной скважине | 1985 |
|
SU1266977A1 |
| Устройство для контроля положения отклонителя,азимута и зенитного угла скважины при турбинном бурении | 1982 |
|
SU1127972A1 |
| Снаряд для направленного бурения | 1985 |
|
SU1280105A1 |
| УСТРОЙСТВО ДЛЯ ЗАБОЙНОГО ОРИЕНТИРОВАНИЯ | 1989 |
|
RU2030575C1 |
С Улет 7
CSasi-a 8 31
Редактор О, Бугир
Составитель И. Карбзлгинская
Техред И.Пс позич Корректор М, Самборская
Заказ 2426/27Тира к 548
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 11 3035 э Москва, Ж--35, Раушская паб. д. 4/5
11рон:вводственно-по.тшграфическое предпррштие, г, Ужгород; ул. ПроектнаЯд 4
,,
-- Ца ж
Подписное
| Авторское свидетельство СССР № 757696, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для ориентирования отклонения в скважине | 1982 |
|
SU1102917A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
