Известны способы автоматического придания уклона дну при устройстве закрытых дрен и открытой сети каналов с применением различных дренажных машин, канавокопателей, траншейных многоковшевых экскаваторов и т. п., требующих предварительного планирования и нивелирования трассы движения машины. Известны способы, основанные на корректировании заглубления рабочего органа в зависимости от колебаний в вертикальной плоскости продольной оси всей машины, требуюндие дополнительных устройств типа натянутых проволок, фотоэлементов и других указателей уклона. Все указанные способы автоматического придания уклона либо трудоемки, либо недостаточно надежны и точны.
Иредлагаемый автомат придания уклона для изменения заглубления рабочего органа землеройной машины непрерывного действия при прокладке дрен каналов является более простым и надежным.
Автомат включает в себя электромотор для изменения заглубления рабочего органа, количество электроэнергии к которому поступает в зависимости от положения движков реостатов электрического моста сопротивления с автоматическим уравновешиванием. Движки реостатов моста сопротивлений управляются от гидравлической следяш:ей системы, которая контролирует заглубление рабочего органа машины в зависимости от пройденного ею расстояния, абсолютной высоты датчика свободного уровня и заданной величины уклона дрен, каналов и т. п.
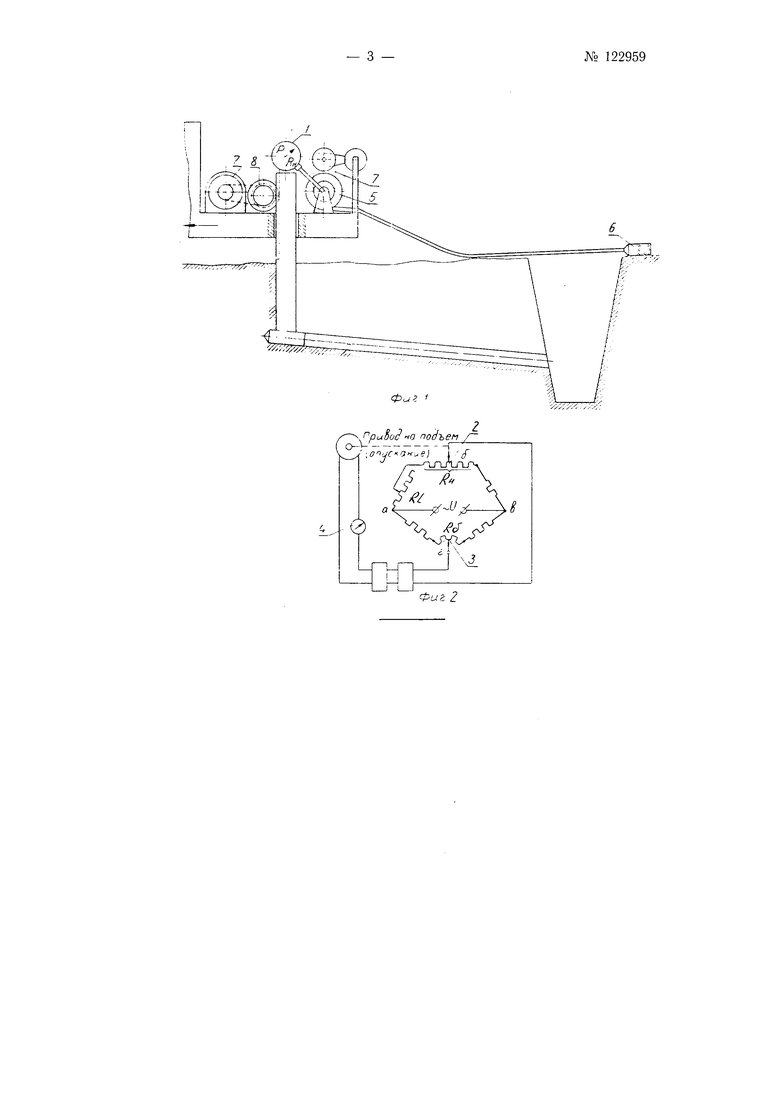
На фиг. 1 изобрал ена принципиальная схема автоматического устройства; на фиг. 2 - электрическая схема автоматического регулятора.
В автомат придания уклона входят следующие основные узлы и детали: } - манометр со шкалой до 0,6 атм или вакуумметр; 2 - два реос№ 122959- 2 -
тата сопротивления, один из которых агрегатируется с манометром; сопротивления Л л,, должны соответствовать друг другу, т. е. при изменении RI- от Одо полной величины RH также должно изменяться в пределах всей шкалы; 3 .- балансирный реостат сопротивления Кб; 4 - чувствительный амперметр; 5-барабан с гибкой тонкой трубочкой, заполненной жидкбстыо; 6 - датчик уровня; 7 - асинхронный короткозамкнутый электродвигатель; 8 - винтовой механизм передачи с легко изменяемым передаточным числом.
Внутренний диаметр трубки должен быть минимальнын. но допускать возможность свободного гравитационного движения жидкости. Конструкция барабана и его размеры должны обеспечивать постоянство внутреннего объема трубки при ее намотке на барабан, ровную послойную намотку трубки и герметичность всей гидравлической системы. Для сохранения постоянной зависимости между изменениями пройденного пути L и сопротивления RI при многослойной навивке трубки на барабан, обмотка реостата RL должна состоять из секций, соответствующих каждому слою намотки. Место крепления манометра (вакуумметра) должно удовлетворять условиям постоянства расстояния по вертикали между осями прибора и режущей кромки или оси рабочего органа и пределов измерения прибора. При наполнении трубки ртутью манометр и концевой датчик могут заполняться дистиллированной водой. Внутренний диаметр трубки должен быть - 2 мм; при этом объем жидкости на каждый погонный метр составит 3 слг. Балансирный реостат и амперметр устанавливаются на приборном щитке трактора или экскаватора. Мащинист после установки орудия в рабочее положение уравновешивает мост с помощью балансирного реостата, а в дальнейшем следит за работой автомата и всего орудия по показаниям амнерметра.
Автомат придания продольпого уклона может применяться во всех машинах непрерывного действия с регулируемым по высоте положением рабочего органа.
Датчик свободного уровня может размещаться в месте начала движения или двигаться вслед за мащиной по готовому дну на постоянном расстоянии от нее.
Предмет изобретения
Автомат для изменения заглубления рабочего органа землеройной машины при прокладке с задапным уклоном дрен, каналов независимо от рельефа местности, с применением электрического моста сопротивлений с автоматическим уравновещиванием, отличающийся тем, что в нем управление электромотором автомата по заданной программе осуществляют движки реостатов моста сопротивлений, перемещающиеся от гидравлической следящей системы, контролирующей заглубление рабочего органа машины в зависимости от пройденного ею расстояния, и состоящей из находящегося на поверхности земли или дне канала датчика уровня жидкости, соединенного с вакуумметром гибкой непроницаемой трубкой.