Недостатком известных шагающих устройств, применяемых з квадратно-гнездовых сеялках для отмеривания междутнездий и включения в работу гнездующего механизма сеялки, является малая нриспособле,:ность их к микрорельефу пЬля.
В предлагаемОМ устройстве указанны недостаток устранен тем, что для отмеривания междугнездий в нем применен шагающн механизм в виде ног, управляемый гидравлическим приводом и независимым дифференциальным устройством. Ноги устройства выполнены телескопическими и связаны с датчиками управления высевающими аппаратами и их исполнительными органами.
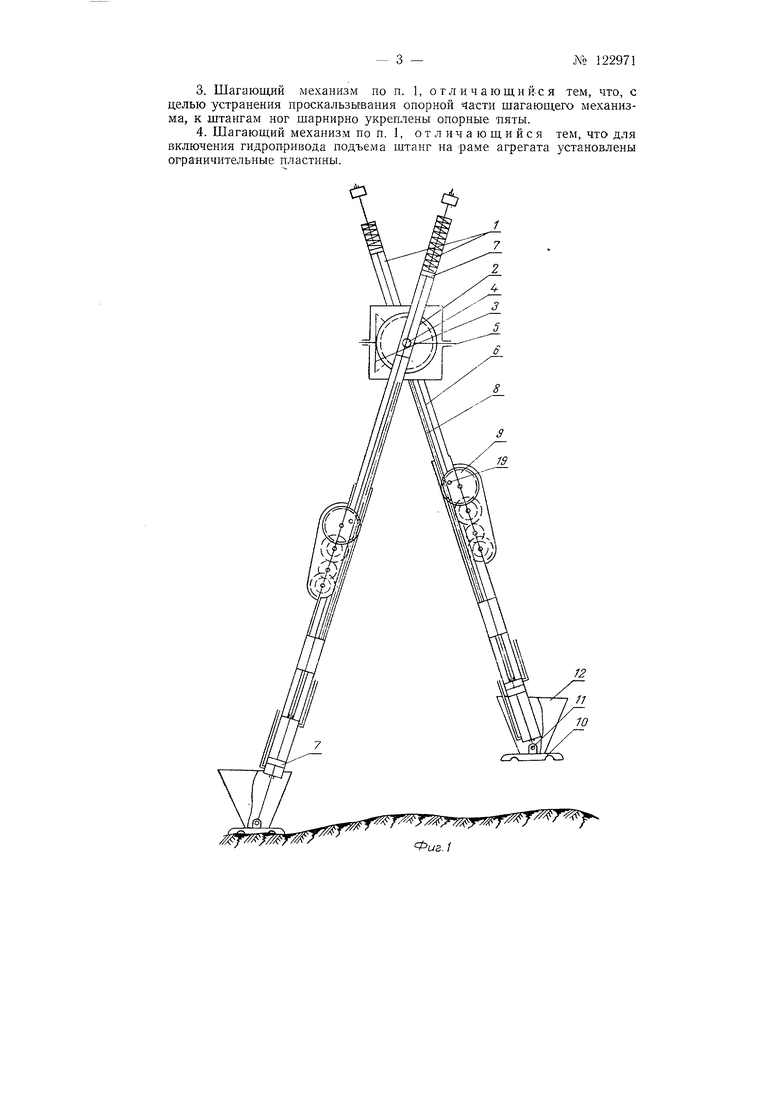
На фиг. 1 изображен шагающий механизм, вид сбоку, с правой стороны; на фиг- 2 - схема его привода от гидромотора; на фиг. 3 - шагающий механизм, вид сбоку, с левой стороны.
Шагающий механизм представляет собой иопеременно nepcMeniaeмые ноги /, укрепленные на конических шестернях 2. Неремещение их осуществляется за счет силы сцепления ног с иочвой, передающейся через конические шестерни 3 дифференциала, установленные на свободно поворачивающ.ихся иолуосях 4 и 5. За счет подъема гидродилиндром одной ноги и связи с почвой под действием силы тяжести второй ноги осуществляется щагание ног на заданную величину мел-сдугнездия. Нижние части ног связаны с верхними при помощи штоков 6, закрепленных на нижних частях и пропущенных через направляющие верхних частей ног, щтоки несут на своих концах порщни 7. На верхних частях ног укреплены рейки 8, входящие в зацепление с шестернями редукторов 9, установленных в нижних частях ног. Конечная щестер;1я редуктора имеет два контактных ролика, взаимодействующих с к мачкам11. включающими через рычажный механизм золотник Г11дрораспределителя и управляющими подъемом и опусканием ног при достижении ими
122971
заданного расстояния в момент сопряжения ноги с ночвой. С ц&.п;ью более полного .контакта опор аюг 10 с почвой и исигючения деформации почвы от цоворрта дог, оноры 10 присоединены к ногам при помощи шарниров 11, -расположенных близко к поверхности поля. Шарнирное соединение // защищено от попадания в него ныли кожухами 12. Шагающий механизм подвешен своей рамой 13 к раме трактора. Положение рамы в торизонтальной плоскости, в зависимости от.рельефа поля, корректируется при .помощи штока 14 гидроцилиндра 15, отвеса 16 и рычалшого механизма 17, включенных в гидропривод.
Горизонтальное положение рамы шагающего механизма в продольном направлении корректируется силой веса и рессорой 18.
Контактируюший ролик 19 на конечной шестерне редуктора 9 (фиг. 1) подъема нижней части ног -вращается в вертикальной плоскости и Взаимодействует с кулачком корректировки шага и .рычажным механизмом 20, а также управляет движением, золотника 21 гидрораспределртеля, пропуская масло по магистрали 22 .в гидроцилиндр ног щагающ.е.го -механизма, гидроцилиндр 23 подвески н тидроцилиндр корректора 24 угла расхожден-ия ног. При этом масло сливается из магистрали 25 через золотник 21 и магистраль 26 в бак 27. Подача масла к золотнику 21 производится щестеренчатым насосом 28 через предохранительный юапап 29 и выравниватель пульсаций 30 на магистраль 31. Управление направлением потока масла осуществляется при помощи ролика 19. Второй ролик 32 установлен на шестерне 9 редуктора с другой ее стороны и вза.имодействует с кулачком 33 и рычажным механизм-ом, управляя включением в работу шагающего механизма (его гидродвигателем) с помощью вала отбора мощности трактора через золотник 34, магистраль 35 и гидравлическую муфту включения 36.
Перед началом работы щагающий механизм уста-иавливается для отмеривания заданного междугиездия. Контактный ролик 19 устанав.тивается при этом по отношению к кулачку корректировки шага в такое положение, чтобы при положении опор ног ниже среднего горизонтального полол ения на новерхиости поля движение их вперед задерживалось на некоторый угол. Этот угол пр-опорционален величине понижения рельефа почвы, -вследствие связи поворота конечной шестерни редуктора 9 с контактным роликом 19 относительно шггока 6 при перекатывании 1шестерии редуктора 9 по рейке 8.
При положении опорной ноги выше среднего горизонтального положения .поверхности поля, в момент контакта с почвой, она -выносится на некоторый угол вперед, вследствие перекатывания шестерен но рейке редуктора и отклонения контактного ролика 19 в противоположном на-правлеини.
Предмет изобретения
1.Шагающий механизм для квадратно-гнездовых сеялок с применением дифференциального -механизма и подпружиненной подвески, обеспечивающей две степени свободы--в торизонталытой и вертикальной плоскостях, отличающийся тем, что его щтанги (ноги) выполнены телескопическими, подвижная и неподвижная части которых соеди ены щтоком с поргинем двойного действия гидросистемы и подвещены на конических щестернях дифференциала.
2.Шагающий механизм по н. 1, отличающийся тем, что, с целью устранения отклонения и ошибок за счет нероБНости поля, в нем применен механизм, состоящий из рейки и щестерни, позволяющий перемещаться нижней части штанги .вверх или вниз; причем рейка укреплена на верхней части щта.нги, а шестерня-па ее нижней части.
3.Шагающий механизм по п. 1, отличающийся тем, что, с целью устранения ироскальзьгвания опорной пасти шагающего механизма, к штангам ног шарнирно укреплены опорные пяты.
4.Шагающий механизм по п. 1, отличающийся тем, что для включения гидропривода подъема штанг на раме агрегата установлены ограничительные пластины.
ФигЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЯЛКА ДЛЯ ПРОПАШНЫХ КУЛЬТУР | 1970 |
|
SU261792A1 |
| Способ высева сыпучих материалов и устройство для его осуществления | 1982 |
|
SU1136761A1 |
| Вибрационный высевающий аппарат сеялки | 1981 |
|
SU997626A1 |
| Станок для вращательного бурения | 1961 |
|
SU141121A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Мостовой агрегат для сельскохозяйственных работ | 1990 |
|
SU1780605A1 |
| Корректирующее устройство к сеялкам квадратно-гнездового типа | 1956 |
|
SU111638A1 |
| Маркер | 1930 |
|
SU24595A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |