Известна система управления гидравлическим ковочным прессом. Она включает водило, жестко связанное с дифференциальным механизмом, содержащим дифференциал суммирования команд ручного и автоматического управления, связанный с устройством автоматического управлення. Последнее выполнено в виде гидравлического цилиндра с поршнем и с золотниковым устройством, встроенным в гидравлическую систему пресса.
Предлагаемая система управления гидравлическим ковочиым прессом позволяет повысить точность управления, а также совместить ручное и автоматическое управление. С этой целью дифференциальный механизм системы включает также дифференциал отрицательной обратной связи, суммирующий команды сг устройства автоматического или ручного управления с движением ползуна пресса, а цилиндр автоматического управлепия снабжен переключающим на реверс устройством, связанным кулачково-рычажной системой с ведо.мым звеном дифференциального механизма и обратной связью с устройством автоматического управления.
жиненного ролика, установленного на ползунке рычага.
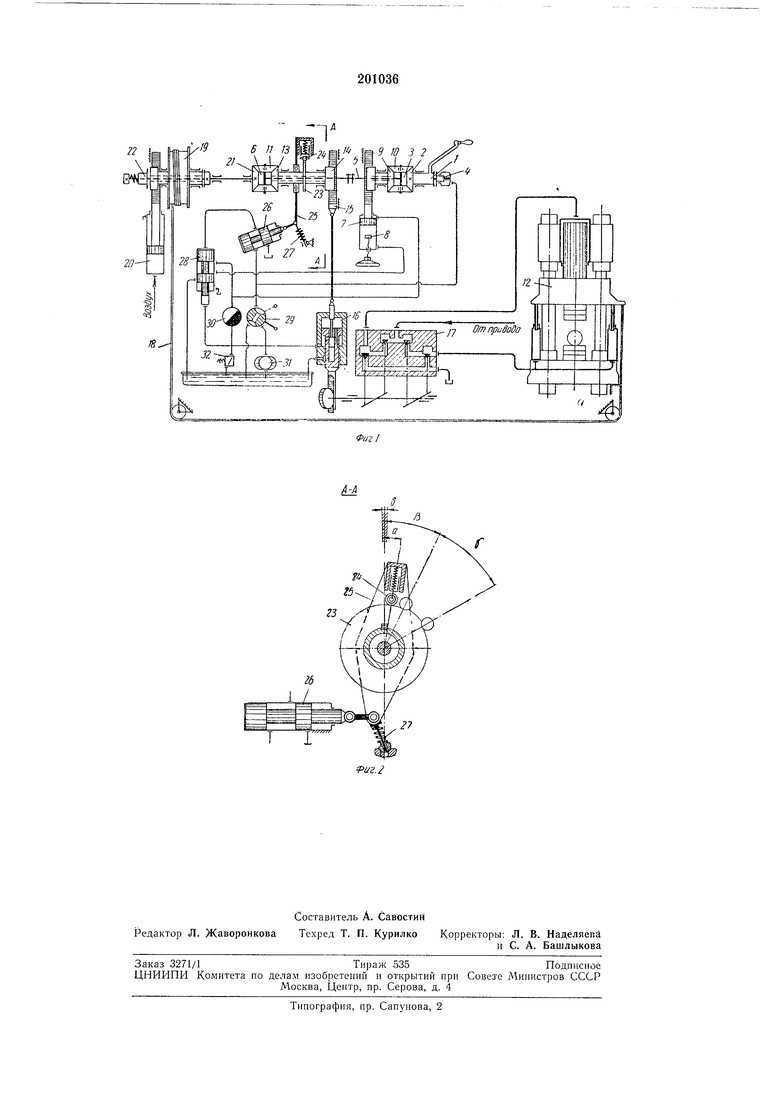
На фнг. 1 показана схема описываемой системы управления гидравлнческим ковочным
прессом; на фиг. 2 - переключающее на реверс устройство.
Управление прессом вручную осуществляется рукояткой 1, жестко связанной с щестерней 2 дифференциала 3. Рукоятка подтормал ивается тормозом 4, поверхности трения которого при ручной работе находятся под воздействием пружины. При автоматической работе поверхности трения сжимаются гидравлическим цилиндром, и рукоятка жестко фиксируется.
Суммируются команды ручного и автоматического управления дифференциалом 3. Суммарная команда от дифференцнала поступаег через водило 5 на дифференциал 6. Автоматическое управление прессом осуществляется гидравлическим цилиндром, жн 1кость в обеих полостях которого в исходном положении находится под равным давлением, а порщень 7 прижат ко дну щтоковой полости. Величина хода поршня регулируется маховичкэм с уиором 8. Шток норшня реечной передачей связан с шестерней 9 дифференциала 3. Суммирование поворотов шестерен 2 и 9 осуществляется сате тлитами W, водило которых является также водилом для сателлидля суммирования команд от гидравлического цилиндра или рукоятки с движением ползуна 12 пресса. Полученная разность передается на ведомую шестерню 13, жестко связанную с шестерней 14, на рейку 15 н золотннк сервомотора 16.
Отрицательная обратная связь ползуна с клапанным распределителем 17 осуществляется через трос 18, барабан 19 и дифференциал 6. Барабан жестко соединен с шестерней, находящейся в зацеплении с рейкой пневматического цилиндра 20, предназначенного для постоянного натял ения троса. С шестерней 21 дифференциала 6 вал барабана связан через предохранительную муфту 22.
Сервомотор служит для усиления сигнала унравлення и представляет собой гидроусилитель с двухкромочным следящим золотником. Посредством реечной передачи поршень сервомотора связан с валом распределителя. Расстояние между каналами поршня выбрано так, что золотник может совершать в нем ход, больший, чем это необходимо для полного открытия каналов поршня. Избыточный холостой ход золотника нужен для «запоминания команды, поступившей от задающего цилиндра, до последующей обработки ее ползуном пресса.
На валу шестерни 13 неподвижно закреплен кулачок 23, воздействующий через ролик 24 и рычаг 25 на золотник 26. Пружина 27 воздействует на рычаг таким образом, что последний не имеет устойчивого среднего положения и стремится занять одно из крайних.
Протяженность выступающей части кулачка 23 (угол Y) определяет величипу опережения реверсирования золотника, которое необходимо для того, чтобы исключить влияние 30inj нечувствительности системы на реверсирование, а также устранить возможность работы прн малых открытиях клапанов раснределителя и связанные с этим потери на дросселирование н замедление ползуна перед реверсом в конце хода.
Золотник 26 предназначен для реверсирования золотника 23 и в процессе работы поочередно сообщает управляющую полость золотника 28 с папорной магистралью н со сливом.
Переключающее на реверс устройство, состоящее из элементов 23, 24, 25, 26 н 27 системы, связано ноложительной обратной связью с гидравлическим цилиндром носредством золотника 28. В исходном положении управляющая полость золотника 28 сообщается со еливом через золотник 26 и трехходовой нереключатель 29, который служит для переключения с работы с ручным управлением на режим работы с автоматическим урпавлением и обратно.
31. Необходимое давление в системе поддерживается с помощью клапапа 32.
При ручном управлении работой пресса переключатель установлен в положении, показаппом на чертелсе. При этом управляющая полость золотпика 28 и гидравлический цилиндр тормоза сообщены со сливом, золотник 26 отключен от напорной магистрали и при поворотах кулачка 23 не производит переключений золотника 28. Обе полости гидравлического цилиндра находятся под давлением, и поршень цилиндра располагается в исходном (верхнем) пололсении, удерл ивая от проворота шестерню 9 дифференциала 3. Рукоятка притормаживается прул ;иной тормоза, что предотвращает самопроизвольный npOBOpoi рукоятки.
При подаче команды на некоторое конечное перемещение ползуна пресса поворотом рукоятки, например, на себя сателлиты 10 дифференциала 3, обкатываясь вокруг ненодвижной шестерни 9, повериут водило 5 также на себя, и это движение сообщится сателлитам 11 дифференциала 6. Так как ползун пресса еще не начал двигаться, шестерня 21 дифференциала 6 также неподвижиа и сателлиты // повернут шестерню 13 также на себя. Золотник сервомотора переместится вверх, усилит командный сигнал и повернет вал распределителя так, что откроются клапан впуска рабочей жидкости в главный цилиндр и сливной клапан из возвратных цилиндров. Ползун пресса опускается, освоболедая трос 18. Цилиндр 20 приведет во вращение на себя барабан, наматывая на него трос. Вместе с барабаном повернется и шестерия 21 дифференциала 6, которая через сателлиты 11, как через иаразитиые шестерни, повернет на себя, т. е. против первоначального команды, ведомую шестерню 13 и, опустив золотник и поршень сервомотора, закроет впускной клапан главного цилиндра и сливной клапан возвратных цилиндров в раснределителе. Переместившись н;1 заданное поворотом рукоятки расстояние, ползуп пресса остановится.
При работе в автоматическом переключатель устаиавливается в положение, соединяющее золотннк 26 и тормоз с nanopHoii магистралью. Рукоятка при этом жестко фиксируется гидравлическим цилиндром тормоза.
В случае если перед установкой переключателя на работу в автоматическом ползун пресса находится в нижнем положении, кулачок 23 роликом 24 и рычагом 25 установит золотник 26 в ноложение, показанное нп фиг. 1, и при подключении его к напорной магистрали верхний торец золотника 28 также окажется под давлепием. Золотник 28 переместится вниз и сообщит со сливом полость гидравлического цилиндра, поршень которого под действием давления в штоковоИ полости переместится вниз до упора, повернув через реечное зацепление шестерню 9 oi себя. Так как шестерня 2 зафиксирована тормозом, водило новернется от себя, и это движение сообщится сателлитам 11, шестерне 13 и через шестерню 14 и рейку 15 золотнику и норшню сервомотора, который опустится вниз и откроет сливной клапан главного цилиндра и внускной клапан возвратных цилиндров. Ползун начнет двигаться вверх.
При ,енин шестерни 13 от себя кулачок 23 повернется по часовой стрелке (фиг. 2) и в конце команды на ход ползуна пресса вверх, подаваемой гидравлическим цилиндром, займет положение, изображенное на фиг. 2.
Па фиг. 2 показаны: минимальный угол и, необходимый для переключепия золотника 26; угол |3, пропорциональный ходу ползуна пресса; угол Y - опережения реверсирования; зона б - нечувствительности переключающего устройства, связанная с перекрытием окон в золотнике 26.
При движении ползуна пресса вверх он натягивает трос, сматывая его с барабана, новорачивает шестерню 13 против часовой стрелки, смещает золотник сервомотора в исходное положение, и сервомотор закрывает клапаны раснределителя. Кулачок 23 поворачивается при этом против часовой стрелки на угол (3, т. е. до тех пор, пока его левый скос пе переключит золотник 26, воздействуя на рычаг 25 через ролик 24.
В положении рычага 25 слева от зоны нечувствительности начнется переключение золотника 28 и реверсирование гидравлического цилиндра, так как с этого положения начнется открытие окон золотника 26 на реверс. Переключающее па реверс устройство связано положительной обратной связью с гидравлическим цилиндром, т. е. при реверсировании гидравлического цилиндра кулачок 23 поворачивается в ту же сторону, в какую его поворачивал ползун пресса. Поэтому поршень 7 совершает дальнейшее реверсирование за счет смещения золотника 26. Одновременно задается команда на реверс ползуна пресса.
Потом опять начинается отработка ползуном пресса перемещения, заданного гидравлическим цилиидром, и работа всех звеньев новторяется в противоположном направлении до очередного реверсирования.
Автоматическая работа продолжается до тех пор, нока переключатель не повернется в положение, показанное на фиг. 1. Если в процессе работы пресса в автоматическом режиме появится необходимость сместить нижиее крайнее положеппе ползуна вверх или вниз с целью изменения размера поковки, что можно сделать поворотом рукоятки, преодолев усилие тормоза, задав дополнительное перемещение на дифференциал 3. Это перемешепие будет суммнровано дифференциалом и сообщится всем звеньям, как при ручном управлении.
Предмет изобретения
1.Система управления гидравлическим ковочным прессом, содержащая водило, жестко связанный с ННЛ1 дифференцнальный механизм, имеющий ведущие и ведомые звенья и включающий дифференциал суммирования команд ручного н автоматического управления, связаищ и с устройством автоматического управления, выполненным в виде гидравлического цилиндра с н переключающим золотниковым устройством, встроенным в гидравлическую систему пресса, отличающаяся тем, что, с целью повышения точности управления, а также совмещения ручного и автоматического управления, дифференциальный механизм включает также дифференциал отрицательной обратной связи, суммирующий команды от устройства автоматического или ручного управления с движением ползуна пресса, а цилиндр автоматического управления снабжен переключающим на реверс устройством, связанным кулачково-рычажной системой с ведомым звеиом дифференцнального механизма и обратной связью с устройством автоматического управления.
2.Система по п. 1, отличающаяся тем, что переключающее на реверс устройство состоит из кулачка со скосами и подпружиненного рычага, имеющих свободу неремещеиия одии относительно другого и соединяющихся па участке переключе)1ия посредством подпружиненного ролика, установленного па нолзунЕче рычага. 2 Js IhllH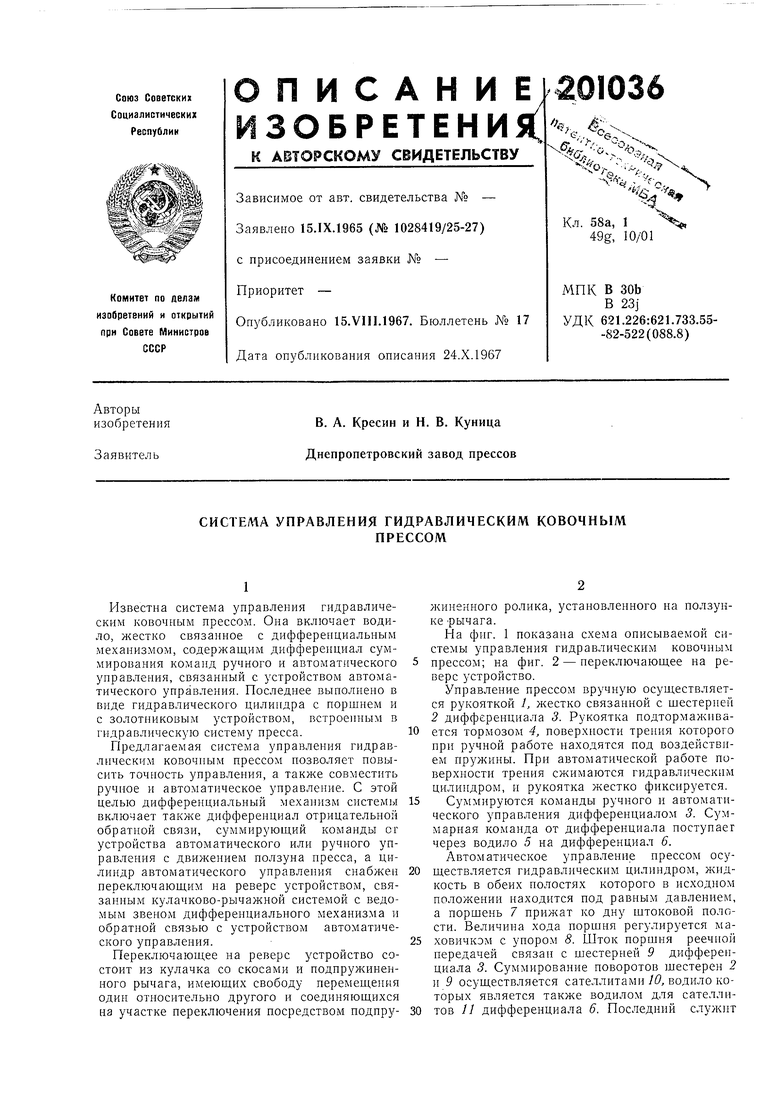
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления ковочным прессом | 1975 |
|
SU610678A1 |
| РЕВЕРС-РЕДУКТОР | 1969 |
|
SU233391A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1968 |
|
SU232021A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМПРЕССОМ | 1971 |
|
SU418351A1 |
| СИСТЕМА ВОЗДУШНОГО ПУСКА И РЕВЕРСИРОВАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1973 |
|
SU394979A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| ЗОеСОЮЗНАЯ ; ;iA;iHTHO-h;]-;;«"E:i!Afi' | 1973 |
|
SU382837A1 |
| Устройство для реверсирования винта с автоматическим изменением шага | 1942 |
|
SU67587A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ПРАВКИ | 1969 |
|
SU233419A1 |
| ПРИВОД ВИНТОВОГО ПРЕССА | 1971 |
|
SU307915A1 |