Изобретение относится к машиностроению, в частности к конструкции защитных устройств рабочей зоны промышленного оборудования.
Цель изобретения - расширение функциональных возможностей за счет повьшения селективности работы систем и настройки избирательности срабатывания аа различные предметы, вно - симые в опасную зону.
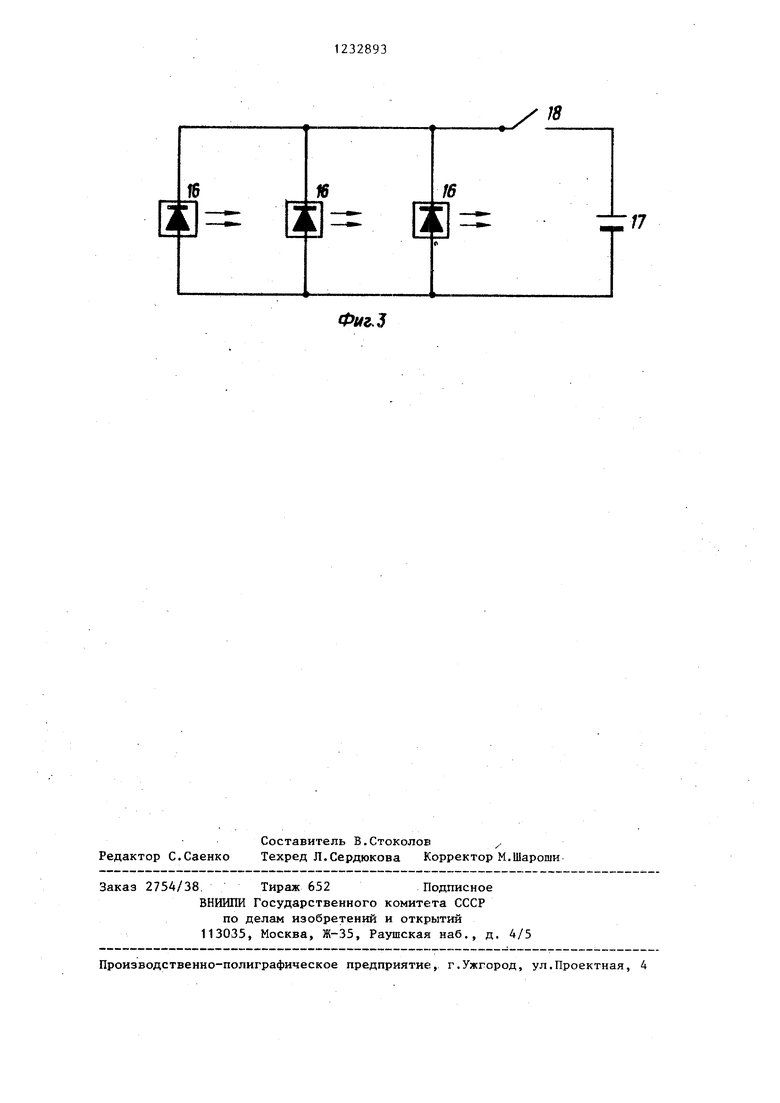
На фиг.1 приведена блок-схема предлагаемой системь;; на фиг-2 - приемник излучений; на фиг.З - схема включения приемника.
Система видеозащиты рук (фиг.1) содержит источник 1 инфракрасных из- л чений, выполненный в йиде браслета, приемник 2 излучений в виде блока инфракрасных фотодиодов 3, количество которых зависит от формы и размеров зашдщаемой зоны, узел 4 включения оборудования, имеющий датчик 5 включения питания и датчик 6 включения оборудования на рабочий ход, последовательно соединенные генератор 7 импульсов (блокинг-генера- тор), линию 8 задержки и светодиод 9 дающий контрольную засветку фотодиодов приемника 2 излучений, а также соединенные между собой пороговый элемент 10 (компаратор), формирующий сигнал определенного уровня, триггер 11 разрешения (RS-триггер) логически сумматор 12, реализующий функцию импликации, включающий в себя инвертор 13 и схему НЕ-И 14 (с инверсией).
Выход системы видеозащиты подключается к исполнительному устройству управления- оборудованием (на фиг.1 не .показано).
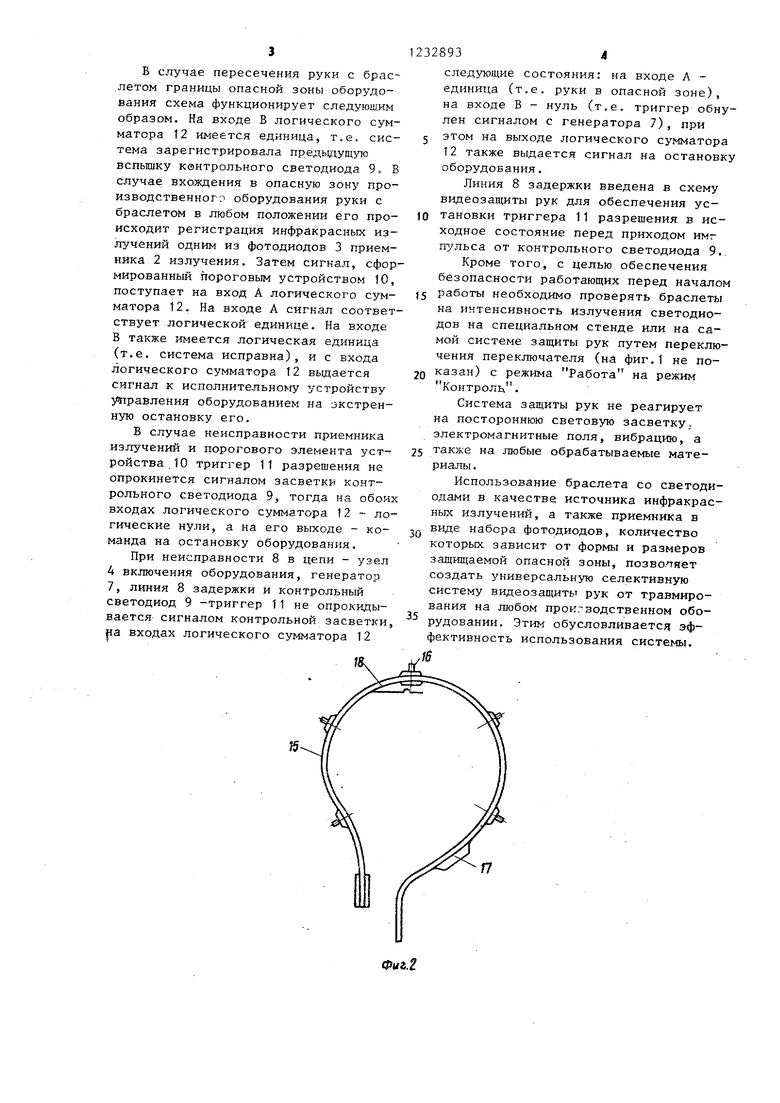
Браслет (фиг.2) выполнен в виде ремешка 15 из полосы гибкого материала (например, кожа,, капрон, ткань, пластическая масса), на которой по периметру расположены несколько (от 4 до 6) светодиодов 1б - источников инфракрасного излучения, электрически соединенных собой по схеме (фиг.З). Цепь (общий автономный источник 17 питания и светодиоды 16) замыкается выключателем 18 при надевании браслета на руку и защелкивани замка ремешка.
Работа системы видеозащиты рук основана на регистрации ИК-лучей в зоне опасного пространства оборудования при введении браслетов, которые носит оператор на обеих руках.
, й
и
10
15
20
25
328932
Система работает следующим образом. При включении питания оборудования сигнал с датчика 5 включения питания включает генератор 7 импульсов, импульс которого , задержанный линией 8 задержки, заставляет вспыхнуть конт- рольньп светодиод 9 и опрокинуться в нулевое положение триггер 11 разрешения .
Вспышка контрольного светодиода 9 регистрируется фотодиодами 3 приемника 2 излучений. Сигнал, формируясь пороговым элементом 10, поступает на логический сумматор 12 и триггер 11 разрешения, последний опрокидывается и выдает сигнал (логическую единицу) на логический сумматор 12. После вспьш1ки контрольного светодиода на входах логического сумматора 12 устанавливаются следующие состояния: нуль на входе А (сигнала нет) и единица на входе В (сигнал есть), при этом на выходе сумматора 12 - логический нуль. Сигнал на остановку оборудования не поступает, т.е. машина готова к работе.
При нажатии кнопки Пуск (не показана) совершается рабочий ход обо- )удования. Затем запускается генератор 7 импульсов от датчика 6 включения оборудования на рабочий ход, и задержанный линией 8 задержки импульс заставляет вспыхнуть контрольный светодиод 9 и обнулиться триггер 11 раз- реЕ1ения. Сигнал контрольного светодиода регистрируется приемником 2 излучения и, формируясь пороговым устройством 10, заставляет опрокинуться триггер 11. После регистрации вспышки контрольного светодиода на входах логического сумматора 12 устанавливаются те же состояния, что и в предыдущем случае.
Оборудование готово к следующему рабочему циклу. Таким образрм, рабочие органы оборудования совершают рабочий ход при нажатии кнопки Пуск и отсутствии руки с браслеток в опасной зоне.
Узел 4 включения оборудования, генератор 7 импульсов, линия 8 задержки, светодиод 9 и триггер 11 осуществляют постоянньш контроль работоспособности системы видеозащиты рук. Триггер 11 разрешает пуск оборудова- 5S ния лишь в том случае, если система видеозащиты исправна, она хранит сигнал разрешения пуска от предыдущей засветки контрольного светодиода 9.
30
35
40
4S
SO
Б случае пересечения руки с браслетом границы опасной зоны оборудования схема функционирует следующим образом. На входе В логического сумматора 12 имеется единица, т.е. система зарегистрировала предыдущую вспышку контрольного светодиода 9. В случае вхождения в опасную зону производственного оборудования руки с браслетом в любом положении его происходит регистрация инфракрасных излучений одним из фотодиодов 3 приемника 2 излучения. Затем сигнал, сформированный пороговым устройством 10, поступает на вход А логического сумматора 12. На входе А сигнал соответствует логической единице. На входе В также имеется логическая единица (т.е. система исправна), и с входа логического сумматора 12 выдается сигнал к исполнительному устройству управления оборудованием на экстренную остановку его.
В случае неисправности приемника излучений и порогового элемента уст- ройства 10 триггер 11 разрешения не опрокинется сигналом засветки контрольного светодиода 9, тогда на обои входах логического сумматора 12 - логические нули, а на его выходе - команда на остановку оборудования.
При неисправности 8 в цепи - узел 4 включения оборудования, генератор 7, линия 8 задержки и контрольный светодиод 9 -триггер 11 не опрокидывается сигналом контрольной засветки на входах логического сумматора 12
/J
232893Л
следующие состояния: на входе А - единица (т.е. руки в опасной зоне), на входе В - нуль (т.е. триггер обнулен сигналом с генератора 7), при 5 этом на выходе логического сумматора 12 также выдается сигнал на остановку оборудования.
Линия 8 задержки введена в схему видеозащиты рук для обеспечения ус10 тановки триггера 11 разрешения в исходное состояние перед приходом имг щ льса от контрольного светодиода 9,.
Кроме того, с целью обеспечения безопасности работающих перед началом
J5 работы необходимо проверять браслеты на интенсивность излучения светодио- дов на специальном стенде или на самой системе защиты рук путем переключения переключателя (на фиг.1 не показан) с режима Работа на режим Контроль.
Система защиты рук не реагирует на постороннюю световую засветку, электромагнитные поля, вибрацию, а
25 также на любые обрабатываемые материалы .
Использование браслета со светоди- одами в качестве источника инфракрасных излучений, а также приемника в
,„ виде набора фотодиодов, количество которых зависит от формы и размеров защищаемой опасной зоны, позволяет создать универсальную селективную систему видеозащиты рук от травмирования на любом прои.водственном обо20
35
рудовании. Этим обусловливается эффективность использования системы.
)6
17
х
17
Фиг.3
Редактор С.Саенко
Составитель В.Стоколов Техред Л.Сердюкова Корректор М.Шароши
Заказ 2754/38. Тираж 652Подписное
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ УГЛА ОТКЛОНЕНИЯ ОСИ КОСМИЧЕСКОГО АППАРАТА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1993 |
|
RU2020412C1 |
| СПОСОБ РЕГИСТРАЦИИ ДЫМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2134907C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЭЛЕКТРИЧЕСКОГО ДУГОВОГО ЗАМЫКАНИЯ | 2021 |
|
RU2767600C1 |
| Устройство для защиты оператора пресса | 1978 |
|
SU751654A1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| ДИСТАНЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1993 |
|
RU2094851C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА С БЕЗОПАСНОЙ ПЕРЕДАЧЕЙ ИНФОРМАЦИИ | 1995 |
|
RU2100906C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ТРАНСПОРТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127905C1 |
| Защитное устройство | 1985 |
|
SU1295134A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| Устройство для защиты оператора пресса | 1978 |
|
SU751654A1 |
