Изобретение относится к измерительной технике и может найти применение при проектировании измерителей углов отклонения оси космического аппарата (КА) от направления на излучающий ориентир, в частности, датчиков для определения координат Земли в связанной системе координат (ССК) КА.
Известные устройства [1],[2] представляют собой датчики кругового сканирования горизонта планеты. Недостатком является необходимость расположения на корпусе КА с обеспечением отсутствия элементов конструкции в конусе сканирования датчика с углом при вершине до 150...160о (угловой размер Земли для высоты полета около 200...300 км).
Известны измерители углового отклонения оси КА [3],[4] секущего типа: первый - с двумя параллельными полями, пересекающими всю Землю, второй снабжен блоками для дискриминации помеховых сигналов от Солнца, Луны по длительности импульсов. Недостатком указанных устройств является невозможность формирования измерительной информации при засветке поля зрения чувствительного элемента (ЧЭ) помеховым излучением Солнца.
Наиболее близким к решаемой задаче (прототипом) является устройство инфракрасного датчика измерения отклонения оси КА от вертикальной плоскости [5].
Датчик содержит привод сканирования, кинематически связанный со сканирующим элементом, первым и вторым концевыми датчиками и с датчиком счетных импульсов, последовательно соединенные оптическую систему, оптически связанную с выходом сканирующего элемента, приемник излучения, усилитель, самоблокирующееся пороговое устройство и ключевой коммутационный элемент, схему запрета, информационный вход которой соединен с выходом датчика счетных импульсов, управляющий вход - с выходом порогового устройства, а выход соединен с первым входом устройства счета импульсов, второй и третий входы которого соединены соответственно с выходами первого и второго концевых датчиков, с вторыми и третьими входами ключевого элемента и порогового устройства, а выход - с четвертым входом ключевого элемента. Для селекции сигнала от Солнца датчик снабжен установленным на втором выходе оптической системы вторым приемником излучения, мгновенное поле зрения которого соосно мгновенному полю зрения первого приемника излучения и превышает его по размеру на фиксированную величину зазора, а выход связан с входом второго усилителя сигнала, формируемого при засветке излучением Солнца.
Недостатком известного устройства является невозможность формирования измерительной информации при засветке поля зрения чувствительного элемента (болометра, пирометра и т.п.) помеховым излучением Солнца.
Целью изобретения является устранение указанного недостатка прототипа.
Цель достигается тем, что в известное устройство измерителя угла отклонения оси космического аппарата от вертикальной плоскости, содержащее привод сканирования, кинематически связанный со сканирующим элементом, первым и вторым концевыми датчиками и с датчиком счетных импульсов, последовательно соединенные оптическую систему, оптически связанную с выходом сканирующего элемента, первый приемник излучения, первый усилитель, самоблокирующееся пороговое устройство и ключевой коммутационный элемент, схему запрета, информационный вход которой соединен с выходом датчика счетных импульсов, управляющий вход - с выходом порогового устройства, а выход соединен с первым входом устройства счета импульсов, второй и третий входы которого соединены соответственно с выходами первого и второго концевых датчиков, с вторыми и третьими входами ключевого элемента и порогового устройства, а выход - с четвертым входом ключевого элемента, а также установленный на втором выходе оптической системы второй приемник излучения, мгновенное поле зрения которого соосно мгновенному полю зрения первого приемника излучения и превышает его по размеру на фиксированную величину зазора, а выход связан с входом второго усилителя сигнала, формируемого при засветке излучением Солнца, введен блок переключения уровня срабатывания порогового устройства, вход которого связан с выходом второго усилителя, а выход соединен с четвертым входом порогового устройства и пятым входом ключевого элемента, а в пороговое устройство дополнительно включены второй пороговый релейный элемент и задатчик величины его порога, уровень срабатывания которого больше максимального уровня сигнала от излучения планеты, но меньше минимального уровня сигнала от излучения Солнца.
При этом самоблокирующееся пороговое устройство содержит управляемый переключатель, информационный вход которого соединен с первым входом порогового устройства, управляющий вход - с четвертым входом порогового устройства, первый выход переключателя соединен с входом первого релейного элемента, а второй выход соединен с входом второго релейного элемента, первый и второй задатчики уровней пороговых сигналов подключены к вторым входам соответствующих релейных элементов, выходы которых связаны с входами первого логического элемента ИЛИ, входы второго логического элемента ИЛИ связаны с вторым и третьим входами порогового устройства, а выход соединен с обнуляющим R-входом триггера, установочный S-вход которого связан с выходом первого элемента ИЛИ, а выход соединен с выходом порогового устройства.
Уровень срабатывания первого релейного элемента больше максимального уровня помеховых, преимущественно шумовых сигналов, но меньше минимального уровня сигнала от излучения планеты, а уровень срабатывания второго релейного элемента больше максимального уровня сигнала от излучения планеты, но меньше минимального уровня сигнала от излучения Солнца.
Причинно-следственная связь между совокупностью вышеуказанных существенных признаков и достигаемым результатом заключается в том, что, благодаря введению новых элементов и нового исполнения порогового устройства, измеритель угла приобретает новое свойство, а именно измерителя углового положения Солнца.
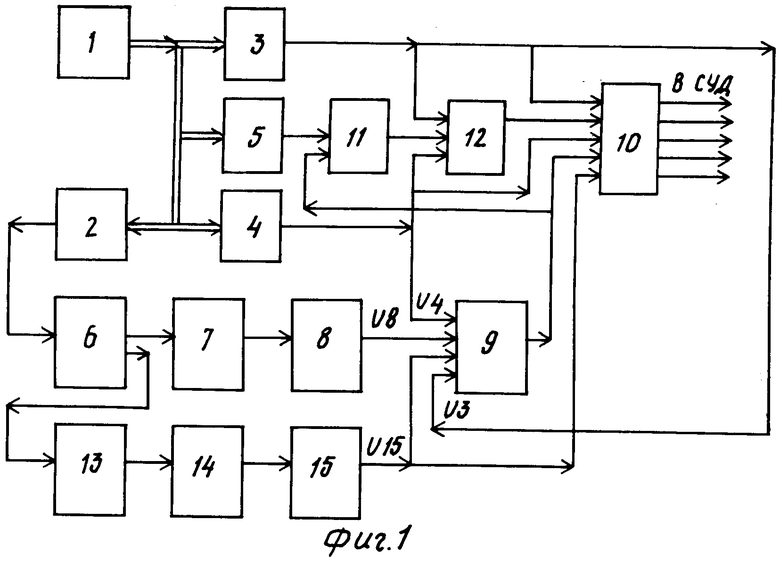
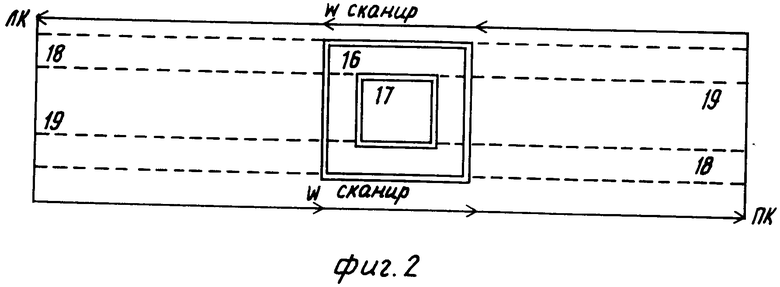
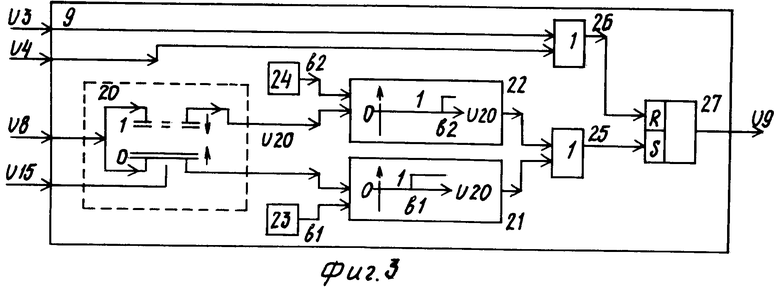
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 показано формирование поля обзора датчика при линейном сканировании; на фиг.3 приведена структурная схема самоблокирующегося порогового устройства.
Предлагаемое устройство содержит (фиг.1) привод 1 сканирования, кинематически связанный со сканирующим элементом 2, первым 3 и вторым 4 концевыми датчиками и с датчиком 5 счетных импульсов, последовательно соединенные оптическую систему 6, оптически связанную с выходом сканирующего элемента 2, первый приемник 7 излучения, первый усилитель 8, самоблокирующееся пороговое устройство 9 и ключевой коммутационный элемент 10, схему 11 запрета, информационный вход которой соединен с выходом датчика 5 счетных импульсов, управляющий вход - с выходом порогового устройства 9, а выход соединен с первым входом устройства 12 счета импульсов, второй и третий входы которого соединены соответственно с выходами первого 3 и второго 4 концевых датчиков, с вторыми и третьими входами ключевого элемента 10 и порогового устройства 9, а выход - с четвертым входом ключевого элемента 10. На втором выходе оптической системы 6 установлен второй приемник 13 излучения, выход второго приемника 13 излучения связан с входом второго усилителя 14 сигнала, формируемого при засветке второго приемника излучением Солнца. Выход второго усилителя 14 соединен с входом блока 15 переключения уровня срабатывания порогового устройства 9, причем выход блока 15 переключения уровня срабатывания соединен с четвертым входом порогового устройства 9 и пятым входом ключевого элемента 10, а вход - с выходом второго усилителя 8.
Выходы ключевого коммутационного устройства 10, являющиеся выходами измерителя, подключаются через соответствующие преобразователи к бортовому цифровому вычислительному комплексу (БЦВК) системы управления угловым движением (СУД) КА.
При этом (фиг.2) мгновенное поле зрения (МПЗ) 16 второго приемника 13 излучения соосно мгновенному полю зрения 17 первого приемника 7 излучения и превышает его по размеру на фиксированную величину зазора. ЧЭ первого приемника 7 излучения представляет собой болометр или пирометр и вырабатывает сигнал при попадании инфракрасного излучения планеты в МПЗ 17. ЧЭ второго приемника излучения представляет собой фотосопротивление, которое вырабатывает сигнал при засветке солнечным излучением и практически не реагирует на излучение планеты.
Второй 13 и первый 7 приемники излучения в процессе линейного сканирования с угловой скоростью Wсканир от левого края (ЛК) к правому краю (ПК) воспринимают излучение, попадающее соответственно в поле обзора 19 МПЗ 17 и в поле обзора 18 МПЗ 16.
Привод 1 осуществляет гармоническое возвратно-поступательное угловое движение сканирующего элемента 2 по синусоидальному закону.
На одной оси со сканирующим элементом 2 укреплен кодирующий диск фотоэлектрического преобразователя угол-код, который содержит три пары светодиод-фотодиод. Светодиод устанавливается с одной, а фотодиод - с противоположной стороны кодирующего диска. При достижении крайних левого (ЛК) или правого (ПК) положений щель на подвижном диске совпадает с щелью на неподвижном нониусе и световой луч от светодиода попадает на фотодиод. Вышеописанное устройство выполняет функции концевых датчиков 3 и 4, которые формируют командный импульс (КИ) о достижении ЛК или ПК.
На подвижный диск нанесена штриховая дорожка, которая модулирует световой поток между упомянутыми светодиодом и фотодиодом. В результате в датчике 5 счетных импульсов формируется и с его выхода выдается последовательность счетных импульсов (СИ) с постоянным угловым интервалом по углу сканирования.
Схема 11 запрета может быть выполнена в виде управляемого релейного ключа, который при поступлении на управляющий вход сигнала в момент пересечения сканирующим элементом границы космос-диск планеты высокого "1" (в момент достижения ПК или ЛК низкого "0") уровня, размыкается (замыкается) и блокирует (разблокирует) прохождение сигнала от информационного входа к выходу указанной схемы запрета.
Счетчик 12 импульсов может быть выполнен в виде управляемого интегратора. СИ, формируемые при движении сканирующего элемента от ЛК до левой границы диска планеты, поступают на счетный вход интегратора и суммируются со знаком плюс. При движении сканирующего элемента от левой (правой) границы диска планеты до ПК (ЛК) схема 11 запрета СИ в счетчик не пропускает. В момент достижения ПК счетчик реверсируется: СИ, формируемые при движении сканирующего элемента от ПК до правой границы диска планеты, суммируются со знаком минус, то есть сумма импульсов в счетчике уменьшается. Таким образом, за один период сканирования на выходе счетчика формируется разность СИ, которая пропорциональна угловому отклонению плоскости чувствительности датчика от измерительной плоскости. При формировании на его управляющем входе КИ о достижении сканирующим элементом ЛК содержимое счетчика 12 обнуляется.
Самоблокирующееся пороговое устройство 9 может быть реализовано (фиг.3) следующим образом. Информационный вход переключателя 20 соединен с первым входом порогового устройства 9, управляющий вход - с четвертым входом устройства 9. Первый выход переключателя 20 соединен с входом первого релейного элемента 21, а второй выход соединен с входом второго релейного элемента 22. Первый 23 и второй 24 задатчики уровней пороговых сигналов b1 и b2 подключены к вторым входам соответствующих релейных элементов 21 и 22, выходы которых связаны с входами первого логического элемента ИЛИ 25. Входы второго логического элемента ИЛИ 26 связаны с вторым и третьим входами порогового устройства 9, а выход соединен с обнуляющим R-входом триггера 27. Установочный S-вход триггера 27 связан с выходом первого элемента ИЛИ 25, а выход триггера 27 соединен с выходом порогового устройства 9.
В пороговом устройстве 9 задатчиками 23 и 24 устанавливаются уровень срабатывания первого релейного элемента (с учетом инерционности приемника излучения, флуктуаций, например, из-за старения радиоэлементов и т.п.) больше максимального уровня помеховых, преимущественно шумовых сигналов, но меньше минимального уровня сигнала от излучения планеты и уровень срабатывания второго релейного элемента больше максимального уровня сигнала от излучения планеты, но меньше минимального уровня сигнала от излучения Солнца. В частности, уровень срабатывания первого релейного элемента выбирается больше максимального уровня сигнала от излучения Луны для исключения влияния ее излучения на работу измерителя.
Блок 15 переключения уровня срабатывания может быть выполнен в виде последовательно соединенных релейного элемента и таймерного устройства запаздывания. В момент засветки Солнцем МПЗ 16 выходной сигнал релейного элемента без запаздывания изменяется с низкого "0" на высокий "1" уровень, а после выхода Солнца из МПЗ 16 таймерное устройство задерживает обратное изменение с "1" на "0" выходного сигнала на расчетное время запаздывания не менее одного периода сканирования.
Измеритель угла работает следующим образом. Привод 1 осуществляет гармоническое возвратно-поступательное угловое движение сканирующего элемента 2 по синусоидальному закону.
С выхода датчика 5 СИ через управляемую от порогового устройства 9 схему 11 запрета поступают в устройство 12 счета импульсов (интегратор). Сумма (интеграл) СИ характеризует величину угла поворота сканирующего элемента 2. При достижении ЛК счетчик 12 по сигналу от концевого датчика 3 обнуляется.
При входе МПЗ 17 в диск планеты инфракрасное (ИК) излучение от планеты через сканирующий элемент 2 и оптическую систему 5 попадает на первый приемник 7 излучения и после усиления его сигнала в блоке 8 поступает на информационный вход устройства 9. При отсутствии засветки от Солнца сигнал от блока 13 U13 = 0 и переключатель 20 подключает входной сигнал U8 к входу первого релейного элемента 21, уровень срабатывания которого b1 устанавливается задатчиком 23. Указанный уровень срабатывания выбран так, что с гарантией превышает максимальный уровень шумовых сигналов, но меньше минимального уровня сигнала от излучения планеты. При входе МПЗ 17 приемника 7 излучения в Землю релейный элемент 21 срабатывает (U21 = =1), сигнал высокого уровня через элемент ИЛИ 25 поступает на установочный S-вход триггера 27 и на выходе последнего устанавливается сигнал U27 = 1, который сохраняется до достижения сканирующим элементом ЛК или ПК. Таким образом, от момента входа МПЗ 17 в диск планеты и до крайней границы траектории (ЛК или ПК) пороговое устройство 9 самоблокируется во избежание повторных ложных срабатываний от помехового излучения, например, от холодных облаков, неоднородностей излучения диска планеты и т.п. На концах траектории сканирования, то есть при достижении ЛК или ПК, концевые датчики формируют КИ U3 = 1 (ЛК) или U4 = 1 (ПК), которые через элемент ИЛИ 26 поступают на обнуляющий R-вход триггера 27 и устанавливают его выходной сигнал U27 = 0, то есть пороговое устройство 9 разблокируется. Одновременно счетчик 12 обнуляется (ЛК) или реверсируется (ПК), ключ в схеме 11 замыкается и счетчик 12 начинает считать СИ до следующего входа МПЗ 17 в диск планеты.
Разность сумм импульсов, вычисленная в счетчике 12 при движении сканирующего элемента от ЛК до левой границы диска планеты и при движении от ПК до правой границы диска планеты, характеризует угловое отклонение плоскости чувствительности измерителя от измерительной плоскости, перпендикулярной плоскости сканирования и проходящей через радиус-вектор КА. КИ, формируемые в блоках 3 и 4 при достижении ЛК и ПК, сигнал с выхода блока 9 о пересечении границы космос-диск планеты, суммарное количество счетных импульсов с блока 12 поступает в БЦВК СУД КА.
При попадании излучения Солнца в МПЗ 16 второго приемника 13 излучения сигнал U13 усиливается в блоке 14 и поступает в блок 15 переключения уровня срабатывания порога. На выходе блока 15 формируется сигнал U15 = 1, по которому переключатель 20 подключает к входу блока 9 второй релейный элемент 22.
Уровень срабатывания b2 второго релейного элемента 22 устанавливается задатчиком 24 больше максимального уровня сигнала от излучения планеты, но меньше минимального уровня сигнала от излучения Солнца.
Таким образом, излучение Земли практически не влияет на срабатывание релейного элемента 22. Измеритель работает по излучению Солнца точно так же, как по излучению от планеты: блок 12 формирует разность суммарного количества СИ, сформированных при сканировании от ЛК траектории сканирования до левой границы солнечного диска и от ПК траектории до правой границы солнечного диска. Через ключевой коммутационный элемент 10 в БЦВК СУД КА дополнительно поступает выходной сигнал U15 = 1 с выхода блока 15, по которому определяется, что выполняется измерение углового отклонения КА от направления на Солнце. После выхода Солнца из полей обзора 18 МПЗ 16 датчика на выходе блока переключения уровня срабатывания порогового устройства 15 сигнал U15 = 0, по которому в СУД КА определяется, что датчик работает в режиме определения координат Земли.
При включении в измеритель механизма переключения траектории сканирования при засветке Солнцем (т.е. поворота плоскости сканирования на фиксированный угол для исключения засветки от Солнца) в его устройство может быть введена схема задержки поворота плоскости сканирования до достижения надежного измерения координат Солнца или специальный командный блок, задающий режим измерения координат либо планеты, либо Солнца.
Для исключения формирования ложных сигналов измерения в моменты включения измерителя, появления и пропадания засветки Солнцем возможно введение блокировки изменения (формирования) выходного сигнала на время не менее одного периода сканирования с помощью ключевого коммутационного элемента 10.
Предлагаемый измеритель может использоваться в составе СУД КА следующим образом. Угловое положение строительных осей измерителя (в частности, его плоскости сканирования) запоминается в виде установочного кватерниона или матрицы направляющих косинусов в БЦВК СУД. Путем измерения вектора угловой скорости КА и интегрирования кинематических уравнений углового движения на борту КА формируется приборная система координат, характеризующая текущее угловое положения ССК КА относительно его положения на момент начала интегрирования кинематических уравнений. После закрутки КА вокруг оси, параллельной плоскости сканирования датчика, и попадания Солнца в поле обзора датчика выполняется измерение углового положения Солнца в плоскости сканирования - первая координата. Вторая координата определяется геометрическим положением плоскости сканирования и фиксируется в момент входа и выхода Солнца в поле обзора датчика. Измеренные относительно ССК КА координаты Солнца с учетом углового положения КА на момент измерения запоминаются в БЦВК, и далее угловое положение Солнца может быть рассчитано на основе информации о текущем угловом положении КА и запомненных координат Солнца.
Таким образом, предлагаемое построение измерителя угла отклонения оси КА позволяет дополнительно к основной функции датчика осуществлять измерение углового отклонения от Солнца.
Использование: в измерительной технике при проектировании измерителей углов отклонения оси космического аппарата (КА) от направления на излучающий ориентир, в частности датчиков для определения координат Земли в связанной системе координат КА. Сущность изобретения: устройство содержит привод сканирования, сканирующий элемент, два концевых датчика, датчик счетных импульсов, оптическую систему, первый, второй приемники излучения, первый, второй усилители, самоблокирующийся пороговый блок, ключевой коммутационный элемент, схему запрета, блок переключения уровня срабатывания порогового устройства, второй пороговый релейный элемент и задатчик величины его порога. Устройство позволяет определять координаты Солнца наряду с основной его функцией измерения координат Земли. 1 з.п.ф-лы, 3 ил.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Anderson R.H | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| AIAA Paper, N70-476, 1970. | |||
