1
Изобретение относится к оптико- механическому приборостроению и може быть использовано в качестве механизма перемещения оптических компонентов объективов, преимущественно с переменным фокусным расстоянием.
Цель изобретения - повышение точности установки оптических компонентов.
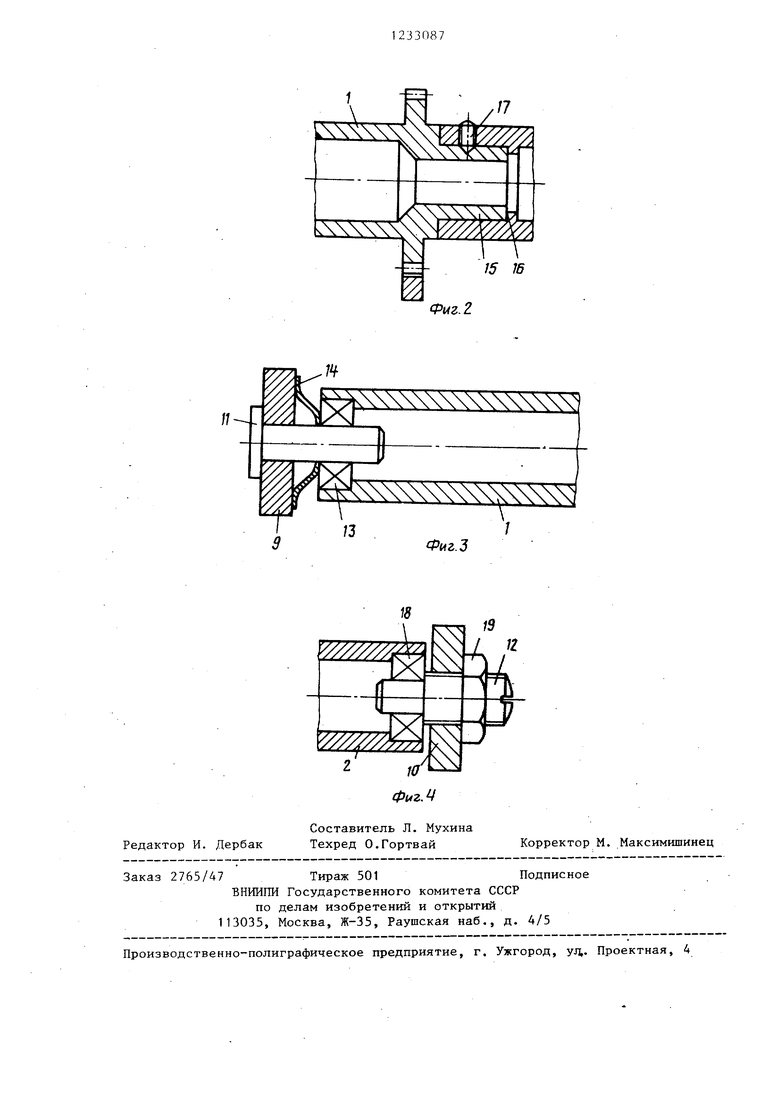
На фиг. 1 представлена кинематическая схема устройства; на фиг. 2 - узел соединения ходовых винтов устройства; на фиг. 3 и 4 - узлы крепления торцовых винтов.
Устройство содержит цилиндрически кулачок - ходовые многооборотные винты 1 и 2, поводки 3 и 4, связывающие кулачок с подвижными компонентами 5 и 6 шестерни 7 и привод 8. Кулачок закреплен в кронштейне 9 и 10 цапфами 11 и 12, которые образуют узлы регулировки.
Узел регулировки на торце ходового винта 1 состоит из цапфы 11 (фиг. 3), которая фиксирует ходовой винт через центральное отверстие подшипника 13. Между кронштейном 9 и подшипником 13 размещен упругий элемент 14. Место соединения ходовых винтов 1 и 2 между собой (фиг. 2) выполнено в виде поворотного узла, состоящего из цилиндрического хвостовика 15, входящего в гнездо 16. Соединение стопорится винтом 17.
Узел регулировки на торце ходового винта 2 выполнен в виде нажимного устройства. Цапфа 12 (фиг. 4) фиксирует ходовой винт 2 через центральное отверстие в подшипнике 18, ввинчена в резьбовое отверстие кронштейна 10 и контрится гайкой 19.
Устройство работает следующим образом.
При вращении ходового винта от привода 8 подводки 4 и 3, взаимодействуя с кулачковыми пазами, перемещают связанные с ними подвижные компоненты 5 и 6. Закон изменения шага кулачка соответствует, закону перемещения компонентов.
33087
Расстояние а между непо.пнижными компонентами 20 и 21 устанавлипается, например, подгонкой корпуса. Выставление расстояния в осуществляется 5 следующим образом..Ослабляется винт 17 и при зафи.сированном положении винта 2 поворачивают винт 1. При этом поводок 3 и связанный с ним компонент 5 перемещают вдоль ходового 10 винта. Нужное положение компонента 5
фиксируется винтом 17. I
Затем выставляют размер S между подвижньпу 5 и неподвижным 20 компо 5 нентами. Для этого вращают цапфу 12 предварительно ослабив гайку 19. При этом перемещаются оба ходовых винта 1 и 2- и связанные с ними через поводки 3 и 4 подвижные компоненты
20 5 и 6. Расстояние между подвижными компонентами остается постоянным. Упругий элемент 14 обеспечивает кинематическую связь устройства.
Положение компонентов контролиру- 25 ется на оптической скамье и необходимое положение фиксируется гайкой 19. Юстировка объектива при сборке закончена .
30 Формула изобретения
Устройство для перемещения опти- . ческих компонентов, преимущественно в объективах с переменным фокусным
35 расстоянием, содержащее узлы регулировки и два или более соосно и жестко соединенных ходовых винта, установленных в подшипниках и связанных поводками через кулачковые пазы
40 с соответствующими оптическими компонентами, отличающееся тем, что, с целью повьш1ения точности, соединение ходовых винтов выполнено с возможностью взаимного поворота и
45 фиксирования, а узлы регулировки
расположены соосно с ходовыми винтами и кинематически связаны с их торцами посредством упругого элемента с одной стороны и нажимного устройст50 ва - с другой.
(риг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм изменения фокусного расстояния панкратического объектива | 1989 |
|
SU1679453A1 |
| Объектив с переменным фокусным расстоянием | 1986 |
|
SU1553938A1 |
| Объектив с переменным фокусным расстоянием | 1981 |
|
SU1015328A1 |
| Способ изготовления объективаС пЕРЕМЕННыМ фОКуСНыМ РАССТОяНиЕМ | 1976 |
|
SU794580A1 |
| Способ юстировки объектива с переменным фокусным расстоянием при сборке | 1989 |
|
SU1793407A1 |
| Объектив с переменным фокусным расстоянием | 1982 |
|
SU1068868A1 |
| БИНОКЛЬ С УСТРОЙСТВОМ ЦЕНТРАЛЬНОЙ ФОКУСИРОВКИ | 1994 |
|
RU2092879C1 |
| Устройство для уравновешивания вертикально подвижного узла | 1982 |
|
SU1060340A1 |
| ПРИВОД ПАНКРАТИЧЕСКОГО ОБЪЕКТИВА | 2003 |
|
RU2260826C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 1999 |
|
RU2148775C1 |
Изобретение относится к области оптико-механического приборостроения и позволяет повысить точность установки оптических коктонентов. Устройство содержит цилиндрический кулачок . в врще ходовых многооборотных винтов 1 и 2, соединенных поворотным узлом. Кулачок закрепле в кронштейнах 9 и 10 цапфами 11 и 12, фиксирующими ходовые винты в подшипниках. При вращении ходовых винтов от привода 8 поводки 3 и 4, взаимодействуя с кулачковыми пазами, перемещают подвижные компоненты 5 и 6. Положение компонентов контролируется на оптической скамье и фиксируется гайкой 19. Упругий элемент 14 обеспечивает кинематическую связь устройства. 4 ил.
.Щ
/Г
Фиг.З
1г
Редактор И. Дербак Заказ 2765/47
Фиг.
Составитель Л. Мухина Техред О.Гортвай
Тираж 501 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор М. Максимишин Подписное
Производственно-полиграфическое предприятие, г. Ужгород, у. Проектная, 4.
Корректор М. Максимишинец Подписное
| Патент Франции № 2209944 кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Объектив с переменным фокусным расстоянием | 1981 |
|
SU1015328A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
